

Odată cu lansarea microcontrolerelor cu arhitectură CAN (Controller Area Network) din anul 1993, popularitatea sistemelor CAN a crescut constant. În cei zece ani sistemele CAN şi-au consolidat poziţia de lider în industria automobilelor şi în cea a protocoalelor reţelelor industriale. Această creştere poate fi atribuită câtorva elemente. Mai întâi, a fost momentul în care Robert Bosch GmbH – un mare producător din industria automobilelor şi a bunurilor industriale – a început să folosească asemenea sisteme. Apoi, a fost binecunoscuta disponibilitate a componentelor hardware “low cost” precum microcontrolerele şi transceiverele care pot suporta asemenea protocoale. În final, a fost avântul luat de tehnologie datorită creşterii capacităţilor de producţie în conjuncţie cu scăderea preţurilor componentelor.
Acest articol a fost inspirat şi din multe alte evenimente apărute de-alungul dezvoltării sistemelor CAN precum micşorarea dimensiunilor componentelor şi scăderea preţurilor microcontrolerelor construite pe arhitectura CAN. Acest lucru este foarte important: odată cu reducerea costurilor sistemelor CAN şi posibilitatea dezvoltării şi mai multor aplicaţii s-au putut dezvolta sistemele de reţea bazate pe puncte de conexiune CAN. În timp ce reţelele LIN (Local Interconnect Network) sunt adesea considerate cele mai ieftine datorită costurilor mici de implementare, reducerea continuă a costurilor sistemelor CAN le-au făcut foarte atractive în ochii multor proiectanţi şi-au invadat practic acest spaţiu.
Reţelele CAN sunt utilizate atât în industria automobilelor cât şi în clădirile moderne ce necesită multe automatizări precum controlul temperaturii şi al iluminatului, sistemele de alarmare, aer condiţionat, sesizare incendiu, ascensoarelor, controlul motoarelor etc. Gama aplicaţiilor va continua să crească în viitor – orice lucru ce trebuie să îndeplinească criterii precum robusteţe şi costuri minime de reţea va deveni un candidat al reţelelor CAN ce va mări numărul conexiunilor CAN existente, estimate astăzi la 150 milioane.
Reţele în autoturisme
Deşi creşterea masivă a numărului aplicaţiilor CAN impune aceste sisteme pe tot segmentul industrial de piaţă, zona în care echipamentele CAN s-au dezvoltat cel mai bine este aceea a industriei automobilelor.
Principala motivaţie de introducere a reţelelor în autovehicule a fost creşterea costurilor şi a greutăţii generate de implementarea prea multor sisteme electronice. Fiecare sistem includea propriile lui cabluri de conexiune la baterie, la instrumentele de bord, cuplarea senzorilor şi actuatorilor. Cablurile erau realizate din sârme de cupru separate care creşteau greutatea maşinii. Înainte de introducerea reţelelor multiplexate, o maşină de lux putea include aproximativ 1500 de cabluri individuale – ce puteau măsura peste 1500 metri – şi aproximativ 2000 terminale. Pe lângă creşterea costurilor şi a greutăţii, devenea aproape imposibilă introducerea cablurilor în portiere.
Sistemul de cablu convenţional a creat o serie de probleme. Datorită tuturor echipamentelor electronice existau foarte multe interconectări şi apăreau o serie de probleme mecanice de interfaţare. Nu era o surpriză când multe dintre problemele care se iveau erau generate de conexiunile defectoase.
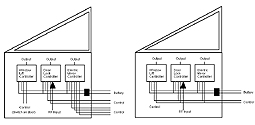
Soluţia care se impunea era înlocuirea tuturor sistemelor de cablu individuale, acolo unde era posibil, cu reţele de comunicaţie seriale multiplexate. Teoretic, o singură magistrală de sistem trebuia să cuprindă toate sistemele din vehicul. Aceasta trebuia să reducă numărul de cabluri, greutatea, costul, timpul de asamblare şi trebuia să furnizeze o mai bună fiabilitate prin reducerea numărului de conexiuni. Diagrama simplificată din figura 1 compară sistemul de control al portierei ce foloseşte legături de cablu convenţionale cu unul multiplexat. Portiera din partea stângă foloseşte mai multe fire pentru a se conecta la funcţiile de control ale uşii, iar numărul cablurilor trecute prin portieră este mai mare. Portiera din partea dreaptă a imaginii foloseşte un sistem de cabluri multiplexat care este conectat la controlerul de sistem. Sistemul multiplexat de cabluri utilizează câteva fire şi conexiuni.
Mesajele din reţeaua autoturismului sunt transmise ca pachete de informaţii seriale. Uzual, acestea sunt formate din trei câmpuri: “header-ul” – adresa de destinaţie a pachetului, “data” – coduri în lungime de la 3 la 12B şi “error correction” – un cod ciclic redundant sau o sumă pentru asigurarea transmiterii corecte a pachetului.
Reţeaua poate fi de asemenea folosită pentru mărirea capabilităţii de diagnosticare a autoturismului. Mai degrabă decât localizarea unei erori, reţeaua vehicolului va include un port (adesea introdus sub tabloul de bord) ce va diagnostica echipamentele conectate. Cum toate acestea sunt “legate” la reţea, portul va permite accesul la orice echipament electronic din automobil. Defecţiunile sau informaţiile de stare pot fi achiziţionate mult mai uşor decât examinarea diferitelor sisteme independente.
Microcontrolerele CAN
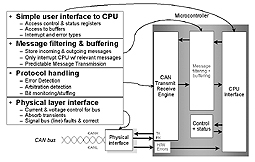
Figura 2 ilustrează cerinţele de bază ale unui microcontroler bazat pe arhitectura CAN. Microcontrolerul este elementul de bază al arhitecturii CAN şi este folosit în fiecare nod al reţelei. Această structură hardware ce include module inteligente realizate cu microcontrolere controlează sistemul conectat la reţea.
Modulele vor fi conectate la Unitatea de Prelucrare Centrală (CPU) printr-o interfaţă simplă pentru a putea fi controlate uşor de sistemul software. Este vorba de o memorie tampon pentru ca datele să poată fi transferate fără erori şi sincronizate de CPU prin magistrala CAN. Urmează etapa “protocol handling” în care pachetele de date sunt aranjate într-un format cerut de magistrala CAN şi în final, transferul datelor către un strat fizic “physical layer”, care este uzual un transceiver. Scopul transceiverului este să convertească informaţia digitală utilizată de controler în semnale robuste de înaltă tensiune cerute de legăturile fizice. În plus, controlerul CAN va include câteva circuite ce vor detecta, identifica, şi raporta erorile, mesajele primite, întreruperile generate de sistem şi arbitrate de sistem împreună cu mici intervenţii ale unităţii centrale. Aceasta înseamnă că sarcina principală a microcontrolerului este de a controla direct aplicaţia (de exemplu controlul unui motor) şi mai puţin să-şi cheltuiască resursele pentru managementul reţelei CAN.

Probabil, singurul factor important ce a dus la succesul şi popularitatea protocoalelor CAN a fost disponibilitatea componentelor electronice “low cost” de a construi sisteme CAN. Este important că noile componente sunt produse continuu, fiecare nouă generaţie ducând la obţinerea de preţuri din ce în ce mai mici. În martie 2003, s-a marcat o nouă etapă pentru sistemele CAN şi anume producerea a două noi microcontrolere CAN ce permit realizarea a încă două puncte de conexiune CAN de cost scăzut. Cele două microcontrolere sunt MC68HC908GZ8 şi MC68HC908GZ16. Amândouă includ caracteristici tehnice identice, dar diferă prin cantitatea de memorie de program Flash EEPROM conţinută. O diagramă bloc a microcontrolerelor este prezentată în figura 3.
Amândouă microcontrolerele, MC68HC908GZ8 şi MC68HC908GZ16 sunt construite pe arhitectura de 8 biţi de înaltă performanţă Motorola – HC08 şi sunt compatibile cu familia de microcontrolere 68HC05 (68HC05 a fost primul microcontroler de 8 biţi ce includea un controler CAN).
Circuitele prezintă module CAN cu 8 şi respectiv, 16KB de memorie flash.
Modulele prezentate în diagramă sunt diferitele circuite ale microcontrolerului folosite pentru controlul general al sistemului. Unitatea centrală este prezentată ca un bloc de-alungul căreia apar memoria de program Flash şi memoria RAM utilizată pentru schimburile de date. Circuitul PLL este folosit la controlul ceasului on-chip şi a modulului de ceas CGM. Modulul “CAN controller” este prezentat în figură ca fiind MSCAN08, iar codul de litere format înseamnă “Motorola Scalable CAN” şi urmăreşte similitudinea cu unitatea de procesare CPU08. În partea dreaptă a diagramei găsim sistemul de întreruperi de la tastatură (KBI), Convertorul analog / digital (ADC) de 10 biţi / 4 canale, interfaţa de comunicaţie serială de mare performanţă ESCI, interfaţa serială (SPI), timere de 16 biţi / 2 x 2 canale şi modulul general de intrări / ieşiri GPIO. Tipic, aceste module ar putea fi conectate la părţi ale sistemului de control: motoare, relee, bobine, senzori etc.
Memoria de program flash a microcontrolerului reprezintă o caracteristică foarte importantă. Memoria Flash este un tip de memorie relativ ieftină (în comparaţie cu “standardul” Byte-erasable EEPROM) ce poate fi (re)programată uşor pe linia de montaj. Diferenţa principală între memoriile EEPROM şi Flash este că aria de memorie Flash poate fi ştearsă ca un bloc. Aceasta permite o suprafaţă mică conformă cu cerinţa de micşorare a logicii de adresare, permiţând în acelaşi timp modificări de program rapide.
Producătorii de sisteme de control îşi doresc adesea să-şi modifice software-ul pe linia de montaj. Dacă nu există metoda de reprogramare a ariei de memorie, tipic, această cerinţă se poate îndeplini prin integrarea unei plăci de circuit de control a unităţii, plăcuţă ce poate fi scoasă sau reintrodusă în sistem. Aceasta implică însă, un proces de producţie mai scump şi mai îndelungat, fără menţionarea marilor inconvenienţe ce pot apărea. Memoria Flash EEPROM furnizează tehnologia care permite asemenea modificări în timp real. În plus, se pot aplica o serie de modificări software modulului ECU dacă acesta poate fi conectat la o magistrală de sistem multiplexată (lucru perfect realizabil cu un laptop care transmite modulului ECU software-ul modificat prin bus-ul de sistem).
Porţiunea de strat fizic al sistemului este implementată într-un chip separat. Aceasta dă proiectantului flexibilitate în realizarea caracteristicilor reţelei ce urmează să fie implementate. În completarea circuitului MC68HC908GZ8 / GZ16 se recomandă sistemul MC33989. Acest chip furnizează transceiverului CAN atât de bine funcţiile adiţionale, încât este întotdeauna cerut în sistem precum o sursă de putere.
Concluzii
În concluzie, este limpede că dezvoltarea sistemelor CAN de-alungul anilor ’90 va exista şi în următoarea decadă mai ales că producătorii de controlere micşorează continuu costurile şi oferă o varietate de produse ce suportă sisteme CAN.
CAN a devenit cu adevărat un standard – aceasta înseamnă că există o uriaşă şi educată comunitate de proiectanţi care utilizează sisteme CAN atât timp cât costurile lor devin tot mai mici. Noile controlere “low cost”vor continua să ajute la creşterea sistemelor CAN în viitorul apropiat.
de Ross Bannatyne, Motorola
rbannatyne@austin.rr.com