

![]() Specificația de bază 5.1 pentru Bluetooth și funcția implementată de determinare a direcției permit acum detectarea direcției și îmbunătățesc funcția de localizare cu o precizie de până la câțiva centimetri. Datorită numeroaselor îmbunătățiri ale scenariilor de automatizare și ale serviciilor de localizare interioare, Bluetooth va fi o opțiune de viitor, bună de luat în calcul pentru aplicațiile industriale complexe.
Specificația de bază 5.1 pentru Bluetooth și funcția implementată de determinare a direcției permit acum detectarea direcției și îmbunătățesc funcția de localizare cu o precizie de până la câțiva centimetri. Datorită numeroaselor îmbunătățiri ale scenariilor de automatizare și ale serviciilor de localizare interioare, Bluetooth va fi o opțiune de viitor, bună de luat în calcul pentru aplicațiile industriale complexe.
Sursă imagini: Bluetooth SIG
Cu cea mai recentă generație de Bluetooth cu consum redus de energie (Bluetooth Low Energy), Specificația de bază 5.1, grupul Bluetooth SIG (Bluetooth Special Interest Group) a deschis calea către servicii și mai precise de localizare bazate pe standardul larg răspândit, Bluetooth. ABI Research se așteaptă să fie vândute în anul 2023 până la 431 de milioane de produse ce folosesc serviciile de localizare Bluetooth [Actualizarea din 2019 a pieței Bluetooth].
Pe lângă funcționalitatea deja cunoscută de determinare a distanței folosind RSSI, noua Specificație de bază 5.1 oferă și o funcție care permite determinarea direcției din de unde vine semnalul. Aceasta permite, de asemenea, o localizare foarte precisă, cu o acuratețe de până la doar câțiva centimetri și oferă o mare varietate de noi potențiale aplicații, atât în segmentul de consum, cât și în aplicațiile industriale.
Soluții bazate pe proximitate și sisteme de poziționare
Serviciile de localizare bazate pe Bluetooth pot lua forma unor soluții bazate pe proximitate sau a unor sisteme de poziționare (Figura 1). Primele sunt aplicații frecvente, care sunt utilizate pentru a aproxima distanța dintre două dispozitive Bluetooth care își intersectează razele lor de acțiune – specifice de multe ori telefoanelor inteligente. În aplicațiile obișnuite deja implementate, care utilizează soluțiile bazate pe proximitate, sunt incluse, de exemplu, locațiile de tip punct de interes (POI – Point of Interest) din domeniul vânzărilor sau de la muzee – atunci când un vizitator se apropie de un punct de interes, primește informații detaliate despre obiectul vizualizat. Multe funcții pentru obiectele de zi cu zi se bazează, de asemenea, pe soluții de proximitate. În aceste aplicații, este plasat un beacon pe obiectul care urmează să fie localizat (breloc, container etc.), fiind găsit ulterior folosind telefonul mobil.
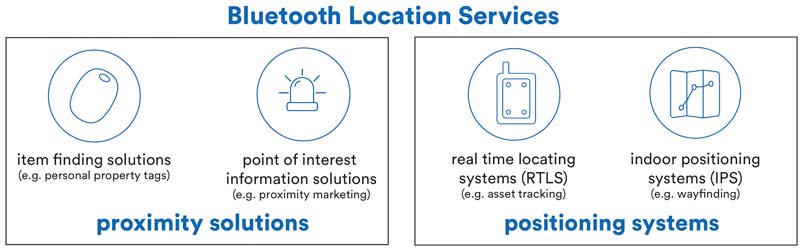
Figura 1: Servicii de localizare bazate pe Bluetooth — Sursă imagini: Bluetooth SIG
Al doilea tip, sistemul de poziționare, determină locația obiectelor individuale într-un sistem închis – o zonă definită din punct de vedere spațial, cum ar fi un depozit, un muzeu sau sala de așteptare de la aeroport. Cele mai frecvente aplicații sunt sistemele de localizare în timp real (RTLS – Real-Time Location Systems) și sistemele de poziționare de interior (IPS – Indoor Positioning Systems).

Sistem Bluetooth de localizare și urmărire bazat pe RSSI — Sursă imagini: Bluetooth SIG
Prin utilizarea unor beacon-uri de localizare adecvate, RTLS permite urmărirea mai multor persoane sau obiecte într-un sistem închis. Acest sistem este potrivit pentru aplicații precum localizarea și urmărirea echipamentelor, a paleților sau a personalului într-un depozit.
Sistemele de poziționare de interior sunt comparabile cu GPS-ul, dar spre deosebire de acesta, IPS-urile funcționează și în spații închise. Mai multe beacon-uri fixe de localizare transmit semnale care pot fi recepționate de dispozitive precum telefoanele mobile, care își calculează poziția relativă pe baza distanței dintre ele și fiecare beacon plasat. Acest lucru permite pasagerilor din aeroporturi sau din centre comerciale să găsească drumul dorit mai ușor și mai rapid.
Înainte de Specificația de bază 5.1, toate sistemele de localizare bazate pe Bluetooth utilizau distanțe estimative, calculate cu ajutorul indicatorului de putere a semnalului primit (RSSI – Received Signal Strength Indicator). Folosind o valoare de referință și puterea reală a semnalului măsurat, receptorul calculează distanța până la emițător, cu o precizie de câțiva metri (~ 1m – 10m).
Rețeaua de antene Mesh permite determinarea direcției
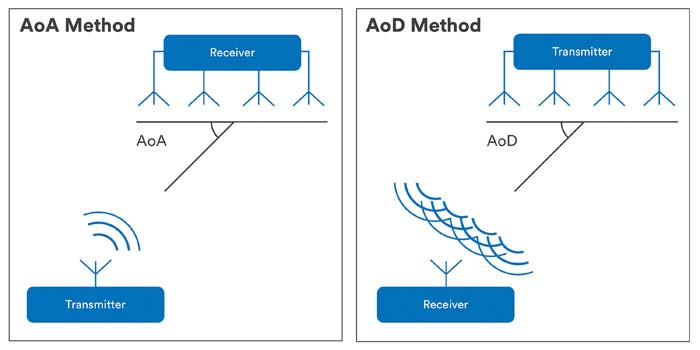
Figura 2: Stânga: Rețeaua de antene se află pe receptor; Dreapta: Rețeaua de antene se află pe emițător — Sursă imagini: Bluetooth SIG
Determinarea direcției este o nouă funcție în Bluetooth 5.1 care nu permite doar stabilirea distanței parcurse de semnal, ci și direcția sursei sale. Soluțiile tradiționale bazate pe proximitate beneficiază, de asemenea, de această nouă funcție, deoarece detectarea direcției sursei unui semnal este o informație esențială care face căutarea unui obiect mult mai ușoară.
Pentru a determina direcția unui semnal, fie receptorul (angle of arrival, AoA – unghiul de recepție) fie emițătorul (angle of departure, AoD – unghiul de emitere) unui semnal de localizare trebuie să aibă instalată o rețea mesh fixă de antene (figura 2). În ambele versiuni, receptorul determină direcția semnalului transmis de către emițător.
Cu toate acestea, algoritmii de determinare a direcției nu fac parte din Specificația de bază Bluetooth 5.1. Pozițiile pot fi determinate prin triangularea unuia sau mai multor unghiuri măsurate cu AoA sau AoD împreună cu distanța măsurată cu RSSI. Această soluție permite determinarea locației cu o precizie de doar câțiva centimetri.
AoA pentru localizare, AoD pentru navigare în spații închise
Într-o aplicație bazată pe AoA, transmițătorul este un emițător cu o singură antenă, de exemplu, un telefon inteligent sau un simplu beacon mobil. Mai multe receptoare fixe de semnal, echipate cu rețele mesh complexe de antene, determină direcția din care este primit semnalul. Aplicațiile AoA sunt foarte potrivite în special pentru urmărirea obiectelor (RTLS), cum ar fi cele din producția automată sau din depozite. De asemenea, permit o precizie sporită atunci când sunt utilizate emițătoare în punctele de interes.
Aplicațiile bazate pe AoD folosesc o rețele mesh de antene la emițător pentru transmiterea semnalului prin diferite antene în mod secvențial. În acest caz, receptorul – probabil un telefon mobil în viitor – va avea o antenă pentru a primi semnalele secvențiale. Dacă poziția beacon-urilor emițătoare este cunoscută, receptorul își poate determina propria poziție în raport cu emițătorul. Acest lucru face ca aplicațiile bazate pe AoD să fie foarte potrivite în special pentru sisteme de poziționare în interior (IPS), pentru navigarea simplă în spații închise cum ar fi în aeroport. Spre deosebire de IPS-urile actuale, utilizatorul nu primește informații despre poziție, ci și despre direcția către destinație. Spre deosebire de aplicațiile bazate pe AoA, metoda bazată pe AoD este mai potrivită pentru situațiile care sunt structurate pe comunicație fără conexiune fizică.
Proiectarea rețelei mesh de antene
Indiferent de metoda folosită, doi dintre cei mai importanți factori de succes pentru funcția de determinare a direcției semnalului sunt amplasarea și numărul antenelor. O serie de antene aranjate simplu într-un rând permite doar determinarea unghiului. Aranjamentele mai complexe în spațiul tridimensional permit determinarea atât a unghiurilor orizontale cât și a celor verticale. Bluetooth SIG nu a furnizat încă cerințe sau recomandări specifice cu privire la poziționarea antenelor, dar acest lucru este probabil să se schimbe atunci când vor fi publicate mai multe articole cu privire la serviciile de localizare.
Potențialul deosebit al lui Bluetooth 5.1
Odată cu introducerea ultimei generații a Specificației de bază 5.1 pentru Bluetooth și funcția sa de determinare a direcției semnalului, Bluetooth SIG a făcut un pas major spre o precizie mai mare a serviciilor de localizare și urmărire, ceea ce poate permite îmbunătățiri semnificative într-o varietate mare de scenarii de aplicații. Cu toate acestea, există un număr de aspecte care trebuie luate în considerare ca acest potențial să fie pus în valoare. De exemplu, un scenariu ideal de aplicație trebuie să reducă la minimum reflecțiile și interferențele generate de mulțimea de canale. Aplicația ideală este un sistem închis, cu suficiente transmițătoare de localizare, fixe, care sunt în vizibile în orice moment. Pentru navigarea interioară – care utilizează telefonul mobil să opereze în întreaga zonă – Bluetooth 5.1 trebuie integrat în toate telefoanele disponibile. De asemenea, trebuie să se țină seama și de polarizare atunci când se utilizează telefoane inteligente, deoarece direcția în acest caz este aproape imposibil de controlat. Spațiul limitat oferit de telefoanele inteligente va condiționa, cel mai probabil, amplasarea unei singure antene, chiar și în viitor, motiv pentru care telefoanele mobile vor putea fi utilizate doar ca emițători în aplicațiile bazate pe AoA sau ca receptori în aplicațiile bazate pe AoD.
Sursă imagine: Nordic
Planuri de viitor
Nordic Semiconductor este unul dintre primii producători care oferă un SoC multi-protocol (System on chip – sistem pe chip) cu suport pentru noua Specificație de bază 5.1 Bluetooth. Pe lângă Bluetooth de detecție a direcției semnalului și Bluetooth cu rază lungă (Long Range), nRF52833 acceptă Bluetooth mesh, 802.15.4, Thread și Zigbee, precum și protocoale proprii de 2.4GHz, permițând aplicații de măsurare a distanței cu o precizie de până la un centimetru și informații despre direcție. Sistemul SoC se bazează pe un procesor ARM Cortex M4F de 64 MHz cu memorie flash de 512 KB și memorie RAM de 128 KB. Alte caracteristici includ: port USB cu viteză maximă de 12 Mbps, SPI de mare viteză la 32 MHz și putere a semnalului de ieșire de +8 dBm. Interfețele sale analogice și digitale includ: NFC-A, ADC, UART/SPI/TWI, PWM, I2S și PDM. Domeniul său de tensiune de alimentare este de la 1.7V până la 5.5 V. nRF52833 operează într-un domeniu larg de temperatură de la -40°C până la 105°C.
Surse:
- Specificația Core 5.1 Bluetooth
- Îmbunătățirea serviciilor de localizare Bluetooth
- O abordare tehnică a determinării direcției semnalului
- Bluetooth Markt Update 2019, ABI Research

Autor: Heike Halder, Manager de Produs – Centrul de Competență Wireless
Rutronik | https://www.rutronik.com
![]()