

 Statisticile arată că mare parte din consumul global de energie se datorează operării motoarelor. Ele sunt mari consumatoare de energie, dar sunt o parte esențială a vieții de zi cu zi, putând fi găsite peste tot, de la mici utilizări rezidențiale, precum electrocasnice și unelte, până la sectorul de transport cu mașini electrice și trenuri și la motoare industriale.
Statisticile arată că mare parte din consumul global de energie se datorează operării motoarelor. Ele sunt mari consumatoare de energie, dar sunt o parte esențială a vieții de zi cu zi, putând fi găsite peste tot, de la mici utilizări rezidențiale, precum electrocasnice și unelte, până la sectorul de transport cu mașini electrice și trenuri și la motoare industriale.
De vreme ce trăim într-o permanentă revoluție industrială, am redus timpul și munca brută prin înzestrarea a orice este posibil cu un motor. O mulțime de dispozitive cu alimentare electrică ne-au făcut viața casnică mai ușoară și comodă, iar locurile de muncă mai eficiente și profitabile. Dar toate acestea la ce cost?
Motoarele consumatoare de energie
În lumea noastră modernă, cea a diminuării resurselor de combustibili fosili, cu temeri în ceea ce privește ecologia și mediul ambiant, producătorii oricăror dispozitive acționate de motoare au în față vremuri pline de provocări. În lipsa unor alternative la scară largă, de obținere a energiei din surse regenerabile, problema este agravată și de creșterea cererii datorate dezvoltării economice în creștere în Africa, Asia și America de Sud. Pe de altă parte, populația mondială este în creștere.
În lume, guvernele iau măsuri legislative pentru a reduce consumurile energetice, dar din motivele anterior menționate, acestea au tendința de a crește. Global, clienții caută produse cu consum energetic redus; acest lucru este valabil și pentru clienții industriali, care vor să investească în echipamente cât mai eficiente energetic.
Miniaturizarea motoarelor
Suplimentar minimizării utilizării energiei, inginerii trebuie să facă față provocării de a reduce dimensiunile motoarelor, driverelor și controlerelor. De exemplu, o mașină de spălat care pune la dispoziție o cuvă de capacitate mai mare aduce un plus pentru client, dar trebuie să se potrivească în dimensiunile standard. Reducerea spațiului pentru componentele electronice creează probleme de management termic, care conduc la provocări de proiectare pentru ingineri. Adăugarea de mecanisme de răcire nu face decât să crească consumul energetic, astfel încât motorul în sine trebuie realizat cu nivele crescute de randament, pentru a genera mai puțină căldură.
Tipuri de motoare
Motoarele electrice utilizează în principiu magnetismul pentru a crea mișcarea. Există două categorii principale de motoare: motoare de curent continuu (DC) și motoare de curent alternativ (AC).
Motoare de curent continuu (DC)
Au fost primele motoare electrice inventate și sunt încă cele mai simple forme de motoare. Motoarele de curent continuu sunt comandate prin trecerea unui flux de curent printr-un conductor în interiorul unui câmp magnetic pentru a produce momentul rotitor. Principalele tipuri de motoare de curent continuu sunt cele cu perii: Brushed DC și cele fără perii Brushless DC. În cazul motoarelor cu perii conectarea energiei electrice la bobina de pe rotor se face prin intermediul unor perii de contact. Motoarele cu perii sunt simple și economice din punct de vedere al costului, dar necesită întreținere mai multă, deoarece periile trebuie regulat curățate și înlocuite.
Motoare DC cu perii marca Faulhaber
Exemplul ales face parte din seria de motoare de curent continuu, a cunoscutei companii Faulhaber. Această serie este însoțită de o serie de reductoare de precizie.
 Seria este caracterizată de:
Seria este caracterizată de:
• Randament ridicat
• Comutație cu contacte din argint
• Reductor planetar de precizie
• Zgomot redus
• Cuplu ridicat
• Masă redusă
Nr. stoc RS: 719-4152
Cod producător: 1016M012G+10/1 256:1
Motoare DC fără perii (brushless) marca RS Pro
După cum sugerează numele, motoarele brushless nu au perii, în schimb magneții permanenți se montează în jurul perimetrului motorului. Acest lucru elimină necesitatea pentru comutatoare și conexiuni, precum și perii. Motoarele fără perii au tendința de a fi mai precise pentru aplicații ce necesită poziționare și au avantajul suplimentar de a necesita întreținere redusă sau chiar zero. Acest lucru are însă un preț: fabricarea motoarelor fără perii costă mai mult și necesită un controler care aduce un cost suplimentar.
 Este ideal pentru o varietate de aplicații. Beneficiind de o construcție rezistentă din materiale de înaltă calitate, motoarele furnizează un moment de ieșire consistent. Deoarece motorul electric este fără perii, el utilizează senzori cu efect Hall pentru a monitoriza poziția rotorului și a controla viteza, asigurând siguranță în funcționare și eficiență.
Este ideal pentru o varietate de aplicații. Beneficiind de o construcție rezistentă din materiale de înaltă calitate, motoarele furnizează un moment de ieșire consistent. Deoarece motorul electric este fără perii, el utilizează senzori cu efect Hall pentru a monitoriza poziția rotorului și a controla viteza, asigurând siguranță în funcționare și eficiență.
Caracteristici și avantaje:
• Senzori cu efect Hall cu
unghi electric de 120°
• Diametru arbore de 8 mm
• Reacție de control a vitezei prin senzorii Hall
• Izolație clasă B
• Miez metalic
Nr. stoc RS: 536-6024
De la unelte de putere la automatizare industrială și de la biciclete electrice la “drone” comandate de la distanță, un număr din ce în ce mai mare de aplicații este realizat cu ajutorul motoarelor DC fără perii (BLDC). În vreme ce soluțiile BLDC necesită electronică de comandă mai complexă față de alternativele cu perii, aceste motoare oferă un număr de avantaje operaționale care includ un randament mai mare și o densitate de putere mai mare. Acest lucru permite implementarea de motoare mai mici și mai ușoare. În același timp, există o uzură mai redusă, ceea ce conduce la o siguranță mai mare în funcționare, o durată mai mare de viață și elimină necesitatea unor operațiuni de întreținere. Motoarele BLDC operează, de asemenea, cu mai puțin zgomot decât corespondentele cu perii.
Motoare de curent alternativ (AC)
Motoarele de curent alternativ pot fi, de asemenea, clasificate în două tipuri principale: cu inducție și sincrone; dar și un tip mai puțin uzual – motoare liniare de curent alternativ.
La nivel de bază, motoarele AC constau din două părți: partea exterioară a motorului, cunoscută ca stator (partea staționară a motorului) și ale cărui bobine sunt alimentate în curent alternativ pentru a produce câmpul magnetic rotativ; în interiorul motorului, conectat la arbore, rotorul produce un alt câmp magnetic rotativ. Motoarele cu inducție (asincrone) sunt numite așa deoarece momentul este produs utilizând inducția electromagnetică. Motoarele sincrone diferă de cele cu inducție prin faptul că ele operează cu sincronizare precisă cu frecvența de linie.
 Motoare sincrone AC, marca Johnson Electric
Motoare sincrone AC, marca Johnson Electric
Exemplul prezentat este un motor AC sincron Johnson Electric 53465, 0.5W, 1 fază, 12 poli, 230Vac.
Aceste motoare sincrone sunt destinate comenzii directe de la o sursă de alimentare AC.
Acestea sunt ideale pentru aplicații de comandă în echipamente de temporizare – instrumentație, mașini și controlul proceselor. Unitățile mai mici pot fi direct conectate la reductoare dedicate.
Nr. stoc RS: 455-2527
Cod producător: 53465
Motoare sincrone cu două fire
 Caracteristici și avantaje:
Caracteristici și avantaje:
• Motoare sincrone cu două fire proiectate pentru utilizare continuă la o viteză constantă (500 r.p.m. la 50Hz)
• Rotație în sensul acelor de ceas văzut dinspre capătul arborelui
• Durată mare de viață (cel puțin 3 ani de utilizare continuă)
• Construcție robustă cu magneți permanenți “tin-can”
• Lagăre din bronz sinterizat cu auto-ungere și durată mare de viață
• Beneficiază de pinion pentru a se potrivi cu o gamă de reductoare UGD Saia-Burgess
• Pot fi blocate cu tensiune aplicată, fără supraîncălzire
Aplicații tipice: comandă ceasuri, dispozitive programatoare, alimentatoare cu hârtie, actuatori, robinete, reclame mobile, relee de timp.
Nr. stoc RS: 455-2628
Cod producător: 52747

 Caracteristici necesare la alegerea unui motor
Caracteristici necesare la alegerea unui motor
La selectarea unui motor sunt câteva atribute cheie după care trebuie căutat:
Viteză: La ce viteză aveți nevoie să ruleze motorul? Această informație va determina tipul de control de viteză. Este nevoie de o gamă de viteză sau de un timp de pornire în rampă?
Moment: Este măsura forței de rotație
Reductor integrat: Există sau nu reductor integrat pentru reducerea vitezei și creșterea cuplului.
Cerințe de putere: Ce putere nominală aveți nevoie? Este pentru o sarcină mare, normală sau ușoară?
Putere nominală: În general dată în watt (W) sau cai putere (CP).
Alimentare: Trebuie verificate cerințele de alimentare: tensiune și curent sau controlere specifice.
Configurație mecanică: Dimensiunea motorului este dictată de aplicația pentru care este destinat. Dimensiunea totală, dimensiunea arborelui, punctele de montare și masa trebuie să fie luate în considerare.
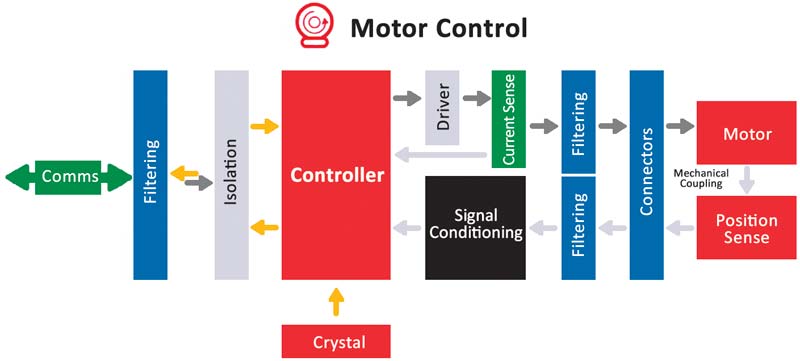
Arhitectura sistemului de control al motoarelor
Diagrama de mai sus prezintă blocurile constructive ale unui sistem de control motoare tipic, ce depinde de tipul de motor, de aplicație, de nivelul de control și, dacă este nevoie, de monitorizare.
Controler – tipic un microcontroler sau DSP. El preia comenzi ca: direcție, viteză și moment, pe care le utilizează pentru a genera unul sau mai multe semnale pentru comanda motoarelor, uzual PWM. Controlerul poate fi, de asemenea, înzestrat cu reacție sub formă de curent sau detecție poziție, cu scopul de a oferi un control mai precis, protecția motorului și detecția erorilor de funcționare.
Driver – este de cele mai multe ori necesar pentru a amplifica semnalul generat de controler pentru a furniza suficientă putere pentru motor.
Senzori – pentru a măsura curentul necesar pot fi utilizate un șunt sau un senzor cu efect Hall. Poate fi, de asemenea, oferită o reacție de poziție curentă a motorului printr-un senzor cu efect Hall sau un traductor de rotație. Această reacție poate fi apoi utilizată pentru a implementa un control mai complex în buclă închisă.
Filtrare – filtrarea este în general implicată în numeroase sisteme de control motoare pentru a suprima sursele de interferențe electromagnetice (EMI).
Izolație – izolația galvanică este în general utilizată pentru a izola controlerul pentru motoare de restul sistemului, care poate fi sensibil la variații tranzitorii.
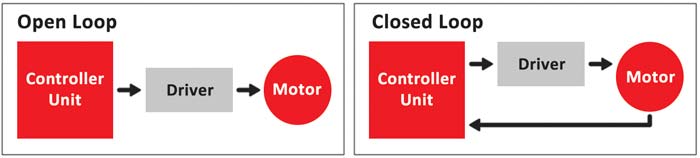 Motoare în buclă închisă sau deschisă
Motoare în buclă închisă sau deschisă
Într-o explicație foarte simplă, un sistem în buclă deschisă nu încorporează nicio reacție. Viteza motorului este controlată pentru a ajunge la o valoare stabilită, care poate varia sub diferite condiții de sarcină. Un sistem în buclă închisă încorporează o reacție prin returnarea informației către etajul de intrare pentru a fi posibile reglaje. Astfel, când viteza este controlată pentru a ajunge la un anumit punct, iar sarcina se schimbă, controlerul va avea misiunea de a aduce din nou viteza la valoare stabilită.
Autor: Bogdan Grămescu
![]() Aurocon Compec
Aurocon Compec
www.compec.ro