


Creșterea preciziei de localizare a roboților autonomi prin unități IMU avansate și fuziunea senzorilor
Unitățile de măsurare inerțială (IMU) sunt fundamentale pentru o gamă largă de sisteme mobile, inclusiv robotica industrială, roboții umanoizi, vehiculele aeriene fără pilot (UAV) și sistemele imersive de realitate mixtă. Deși cerințele specifice diferă de la o aplicație la alta, proiectanții se confruntă constant cu provocarea de a furniza date de orientare și mișcare în timp real, din ce în ce mai precise, pentru o categorie largă de aplicații cunoscută sub denumirea de roboți mobili autonomi (AMR).
Acest articol analizează pe scurt provocările specifice localizării roboților mobili autonomi (AMR). Apoi, prezintă IMU-urile avansate de la Analog Devices și arată cum pot fi utilizate pentru a răspunde acestor provocări în spații interioare, în medii în care sistemele de poziționare globală (GPS) nu sunt disponibile. În același timp, sunt prezentate concluzii relevante obținute din utilizarea acestor tehnologii în aplicații mai largi.
De ce localizarea reprezintă o provocare pentru dezvoltatorii de AMR
Roboții mobili autonomi (AMR) sunt esențiali pentru productivitatea fabricilor și a depozitelor inteligente, unde contribuie la eficientizarea fluxului de materiale, la reducerea deșeurilor și la optimizarea operațiunilor. Asigurarea unei localizări precise în interiorul unei facilități este, prin urmare, critică pentru succesul acestora.
În facilitățile proiectate special pentru astfel de aplicații, provocările legate de localizare pot fi atenuate prin utilizarea marcajelor fiduciale bine amplasate sau a unor amenajări optimizate. În practică însă, majoritatea AMR-urilor operează în facilități existente, unde combinația dintre iluminarea variabilă, suprafețele reflectorizante și geometria complexă face localizarea mult mai dificilă.
În plus, lipsa unei infrastructuri coerente – cum ar fi lățimi standardizate ale culoarelor sau marcaje previzibile pe podea – complică suplimentar sarcinile de navigare și cartografiere ale roboților.
Natura mediului de navigare generează două provocări operaționale esențiale.1
- Planificarea traseului, prin care robotul determină ruta optimă în funcție de condițiile curente ale mediului.
- Localizarea precisă, care presupune actualizarea continuă, în timp real, a poziției și orientării robotului pe măsură ce acesta se deplasează.
În mediile interioare în care GPS-ul nu este disponibil, aceste două obiective trebuie îndeplinite exclusiv cu ajutorul capabilităților de detecție și al resurselor de calcul integrate.
Pentru a face față acestor provocări, AMR-urile utilizează o combinație de modalități de detecție. Sistemele de percepție vizuală – inclusiv camerele, detectarea și măsurarea distanței cu ajutorul luminii (LiDAR) și radarul – furnizează informații detaliate despre mediul înconjurător. Sistemele de odometrie, precum codificatoarele de roți și IMU-urile, urmăresc mișcarea direct din deplasarea robotului.
Fiecare tip de senzor oferă avantaje distincte: unele excelează în detectarea la distanță mare, altele în precizia locală, însă fiecare prezintă și limitări. Prin combinarea inteligentă a acestor date prin fuziune de senzori, AMR-urile pot obține redundanța și acoperirea necesare pentru a menține o localizare precisă în condiții dinamice și imprevizibile.
Ce măsoară o unitate IMU și de ce este important
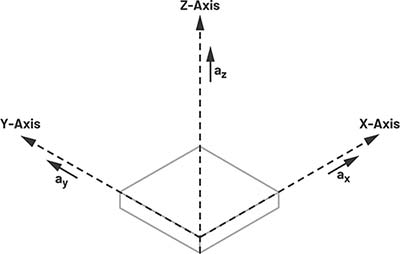
Figura 1: Un accelerometru triaxial măsoară accelerația de-a lungul axelor x, y și z, furnizând atât date dinamice de mișcare, cât și o referință statică de gravitație. (Sursa imaginii: Analog Devices)
O unitate de măsurare inerțială (IMU) integrează senzori cu sisteme microelectromecanice (MEMS) pentru a măsura accelerația și viteza unghiulară în trei dimensiuni. Un accelerometru triaxial măsoară mișcarea de-a lungul axelor x, y și z în raport cu gravitația Pământului, captând atât forțele statice, precum înclinarea, cât și forțele dinamice, cum ar fi accelerația în timpul mișcării (Figura 1).
Un giroscop triaxial măsoară viteza unghiulară (ωx, ωy, ωz) în jurul fiecărei axe (Figura 2), permițând robotului să urmărească modificările de orientare.
La baza accelerometrelor și giroscoapelor din IMU-urile moderne se află structuri MEMS care se deformează sau vibrează atunci când sunt supuse accelerației sau rotației. Modificările rezultate în capacitate sau în frecvența vibrațiilor sunt convertite în semnale electrice.
Avantaje oferite de IMU
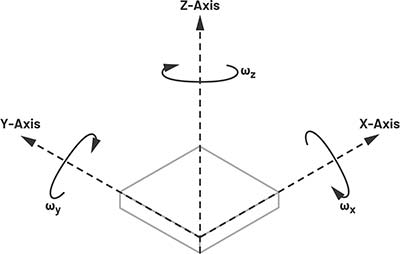
Figura 2: Un giroscop triaxial măsoară viteza unghiulară în jurul fiecărei axe, permițând urmărirea precisă a schimbărilor de orientare. (Sursa imaginii: Analog Devices)
Avantajul IMU-urilor bazate pe MEMS constă în combinația dintre dimensiunile reduse, consumul scăzut de energie și ratele ridicate de măsurare, ceea ce le face ideale pentru integrarea în platforme mobile.
Unele dispozitive IMU includ și senzori suplimentari care le extind capabilitățile. Un magnetometru de înaltă performanță poate furniza măsurători ale câmpului magnetic, utile pentru estimarea orientării în medii dificile, deși magnetometrele sunt mai frecvente în IMU-urile tradiționale.
Un senzor de temperatură integrat permite compensarea termică a datelor accelerometrului și giroscopului, iar în unele cazuri poate fi inclus și un barometru pentru măsurarea presiunii atmosferice și estimarea altitudinii.
Pe lângă matricea de senzori, IMU-urile avansate integrează lanțuri extinse de achiziție a semnalelor, care includ conversia analog–digital, filtrare de tip FIR (Finite Impulse Response) și calibrare din fabrică pentru corectarea abaterilor senzorilor și a nealinierii axelor (Figura 3).
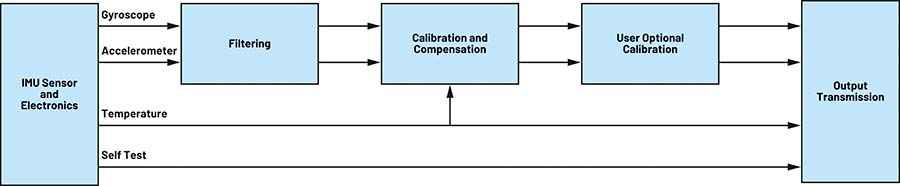
Figura 3: Diagramă bloc funcțională a unei unități IMU avansate, care evidențiază lanțul extins de procesare a semnalelor, incluzând detectarea, calibrarea, compensarea și filtrarea integrate într-un singur dispozitiv compact. (Sursa imaginii: Analog Devices)
Aceste dispozitive permit adesea rotația incrementelor de orientare (dΘ) din cadrul de coordonate intern al IMU-ului pentru a se potrivi cu cadrul de coordonate al robotului înainte de ieșire, reducând astfel sarcina de calcul a procesorului principal.
Cum consolidează unitățile IMU localizarea atunci când alți senzori eșuează
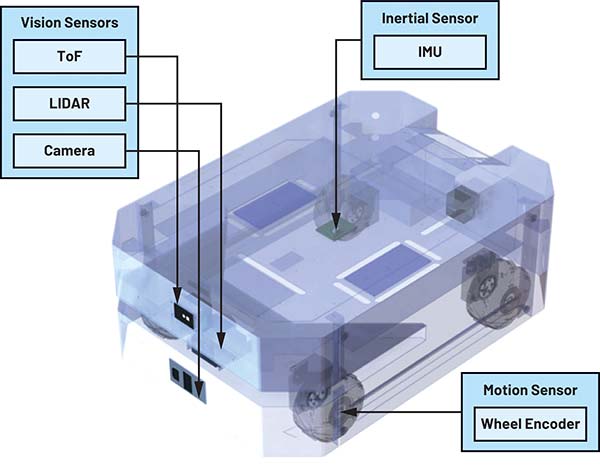
Figura 4: Setul de senzori al unui AMR combină de obicei senzori de vizualizare, un IMU și codificatoare de roți pentru a furniza informații complementare pentru localizare. (Sursa imaginii: Analog Devices)
Anumite caracteristici ale mediilor fizice pot afecta eficacitatea diferitelor tipuri de senzori. Pentru a atenua limitările fiecărui sistem senzorial în parte, un AMR tipic se bazează pe o combinație variată de senzori, care poate include sisteme de vizualizare, senzori ToF (time-of-flight), LiDAR, radar, codificatoare de roți și o unitate IMU (Figura 4).
Într-un coridor cu puține caracteristici distinctive, de exemplu (Figura 5), pereții lungi nu oferă suficiente repere pentru algoritmii de localizare și cartografiere simultană (SLAM), care trebuie să coreleze cadrele curente cu o hartă stocată.
Fără indicii vizuale unice, estimarea poziției robotului poate deriva rapid, ceea ce duce la pierderea localizării AMR-ului.
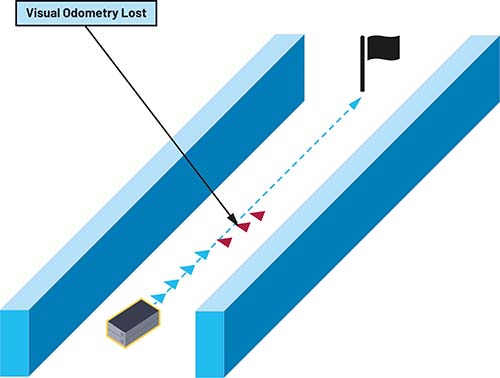
Figura 5: Într-un coridor lung, fără elemente distinctive, odometria vizuală a robotului poate eșua rapid, determinând pierderea poziției AMR-ului dacă lipsesc informațiile privind direcția și orientarea furnizate de un IMU. (Sursa imaginii: Analog Devices)
În acest scenariu, informațiile privind direcția și orientarea furnizate de IMU pot susține navigarea robotului, chiar și în absența unei odometrii vizuale fiabile.
În spații deschise mari, cum ar fi un depozit de 50 m × 50 m, multe caracteristici vizuale se află în afara razei de acțiune efective a LiDAR-ului (Figura 6), care oferă de obicei o rază maximă de aproximativ 10 m până la 15 m.
Dispunerile uniforme, precum rafturile sau zonele de depozitare dispuse la distanțe egale, pot confunda odometria vizuală din cauza aspectului similar al mai multor locații diferite.
În acest context, combinația dintre măsurătorile IMU și datele furnizate de codificatoarele roților permite robotului să își mențină estimările locale ale poziției.
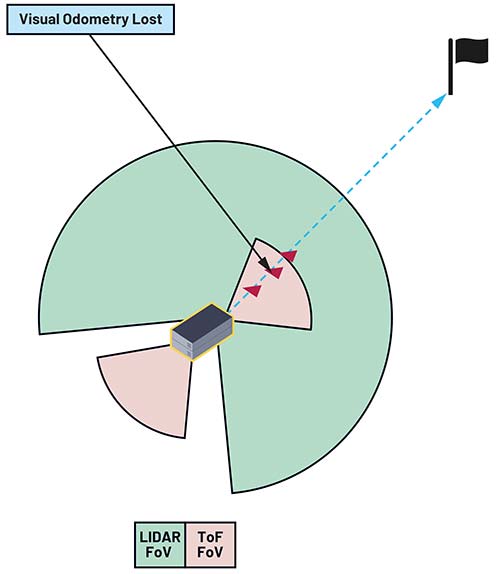
Figura 6: Într-o zonă deschisă mare, unde limitările razei de acțiune a senzorilor și lipsa caracteristicilor vizuale distinctive degradează performanța senzorilor vizuali, măsurătorile IMU și odometria roții pot susține localizarea. (Sursa imaginii: Analog Devices)
Suprafețele înclinate reprezintă o altă provocare majoră (Figura 7).
LiDAR-ul bidimensional standard captează puncte într-un singur plan, astfel încât o pantă poate fi interpretată eronat ca un obstacol vertical. Această interpretare greșită poate perturba navigarea sau poate determina robotul să evite căi perfect traversabile.
În acest caz, datele de înclinare [pitch (unghi de înclinare longitudinală) și roll (unghi de înclinare transversală)] furnizate de IMU pot indica existența unui gradient al suprafeței, permițând algoritmilor SLAM să corecteze interpretarea LiDAR-ului și să distingă între pantele traversabile și obstacolele reale.
Influența factorilor de mediu asupra performanței senzorilor
Factorii de mediu pot degrada semnificativ performanța de localizare a diferitelor tipuri de senzori (Tabelul 1).
Aspecte precum iluminarea slabă, mediile dinamice, suprafețele reflectorizante și necesitatea existenței unei geometrii bogate a scenei pot afecta eficiența majorității modalităților de detecție.
|
Tabelul 1: Impactul diferiților factori de mediu asupra eficienței senzorilor. (Sursa tabelului: Analog Devices)
Unitățile IMU de înaltă performanță – un avantaj cheie pentru AMR-uri
Unitățile IMU furnizează date la rate de actualizare mult mai ridicate decât senzorii de percepție, permițând un răspuns rapid la schimbările dinamice din mediul înconjurător.
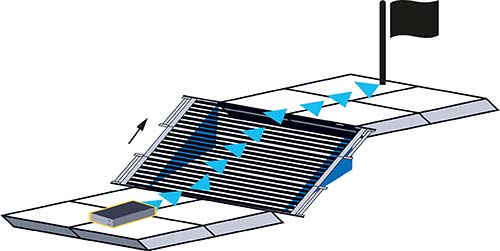
Figura 7: Citirile de înclinare (pitch și roll) ale IMU pot evidenția gradientul unei pante, corectând interpretările eronate ale SLAM 2D și permițând navigarea sigură a AMR-ului. (Sursa imaginii: Analog Devices)
Spre deosebire de sistemele de percepție, care operează de obicei în intervalul 10 Hz – 30 Hz, unitățile IMU pot furniza date procesate la 200 Hz și date brute până la 4 kHz. Având o rată de actualizare de până la 10 ori mai mare, o unitate IMU permite estimări intermediare ale poziției între două măsurători consecutive ale senzorilor de percepție. Această rată de actualizare mai mare duce într-un final la timpi de reacție mai rapizi la schimbările bruște de mișcare și îmbunătățește fiabilitatea sistemului în medii dinamice.
IMU-urile constituie baza pentru estimarea poziției AMR-ului, în care robotul își determină poziția curentă pornind de la o poziție inițială cunoscută, prin integrarea măsurătorilor de accelerație și viteză unghiulară livrate de IMU. Prin furnizarea datelor necesare pentru actualizarea continuă a poziției, orientării și vitezei, IMU-urile permit estimarea precisă a poziției pentru o navigare fiabilă a AMR-ului.
Dimensiuni compacte
Dimensiunile compacte și greutatea redusă favorizează, de asemenea, integrarea IMU-urilor în AMR-uri. De exemplu, dispozitivul IMU ADIS16500AMLZ de la Analog Devices (Figura 8) este disponibil într-o capsulă BGA cu dimensiunile de numai 15 × 15 × 5 milimetri (mm) și integrează un giroscop, un accelerometru, un senzor de temperatură și un lanț complet de semnale pentru achiziția de date și condiționarea semnalelor. Acest nivel de integrare permite furnizarea de date complete de mișcare către procesorul gazdă, facilitând în același timp utilizarea dispozitivului în configurații mecanice cu spațiu limitat, fără a compromite manevrabilitatea robotului.
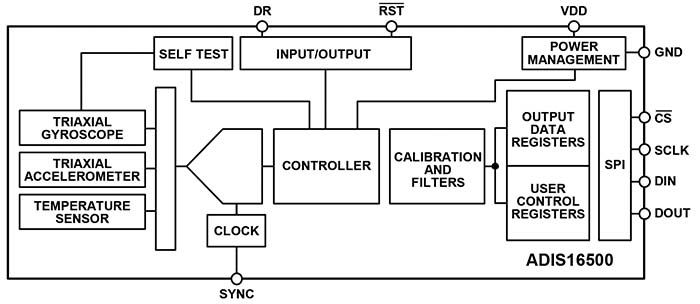
Figura 8: IMU-ul ADIS16500AMLZ integrează un giroscop, un accelerometru, un senzor de temperatură și un lanț complet de semnale pentru achiziția de date și condiționarea semnalelor. (Sursa imaginii: Analog Devices)
Cu o gamă dinamică a giroscopului de ±2000˚ pe secundă (°/s), ADIS16500AMLZ captează viraje rapide fără saturație, ceea ce este esențial pentru AMR-urile care navighează în spații înguste sau care evită rapid obstacolele. Gama dinamică a accelerometrului de ±392 m/s² captează atât mișcările line, cât și șocurile cu impact puternic. Stabilitatea biasului giroscopului de 8,1°/hr și stabilitatea biasului accelerometrului de 125 μm/s² reduc deriva pentru a îmbunătăți precizia calculului de poziție între corecții.
Calibrare din fabrică
Calibrarea din fabrică oferă corecție integrată pentru sensibilitate, bias și alinierea axelor, în timp ce corecția dinamică a offsetului ține cont de schimbările de temperatură, modificările tensiunii de alimentare și interferențele magnetice, precum și de reducerea zgomotului.2 Toleranța la șocuri mecanice a unității IMU de 19.600 m/s² și intervalul de operare de la −25 la 85°C permit utilizarea în medii solicitante, în timp ce convertoarele analog-digitale (ADC) cu zgomot redus și lățime de bandă mare asigură colectarea continuă și precisă a datelor la ratele de actualizare ridicate necesare în sistemele de control receptive.
IMU-urile sunt relativ rezistente la interferențele electromagnetice (EMI) și pot funcționa în condiții de iluminare și mediu variate. Drept urmare, aceste dispozitive pot fi utilizate într-o gamă largă de aplicații, inclusiv în medii industriale solicitante și în sisteme autonome critice.
Atenuarea limitărilor de performanță ale IMU-urilor
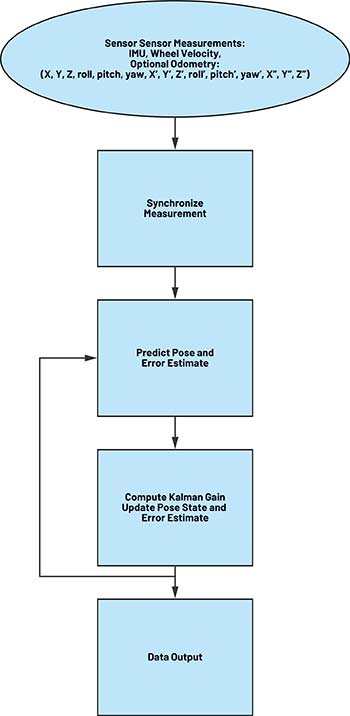
Figura 9: Un algoritm EKF simplificat procesează măsurătorile zgomotoase ale senzorilor în timp pentru a produce o estimare corectată și continuă a poziției și mișcării robotului. (Sursa imaginii: Analog Devices)
În ciuda avantajelor lor în ceea ce privește performanța, IMU-urile prezintă unele limitări inerente.3 Zgomotul nefiltrat poate afecta măsurătorile IMU, ceea ce reduce precizia navigației. Deriva senzorilor inerțiali (accelerometre și giroscoape) se acumulează în timp, ducând la erori progresive în estimările de orientare și mișcare. Comportamentul neliniar al senzorilor distorsionează măsurătorile, iar variațiile termice pot genera erori aleatorii în estimarea unghiului (ARW) în giroscoape și erori aleatorii în estimarea vitezei (VRW) în accelerometre, afectând suplimentar performanța pe termen lung. Dacă nu sunt atenuate, aceste efecte reduc în timp fiabilitatea localizării.
Fuziune de senzori
Fuziunea senzorilor poate depăși limitările unității IMU prin integrarea datelor IMU cu date provenite de la alți senzori pentru a crește calitatea și fiabilitatea datelor, a îmbunătăți estimarea stărilor nemăsurate și a crește acoperirea pentru a spori siguranța. Tehnicile de estimare a stării, cum ar fi filtrarea Kalman extinsă (EKF) (Figura 9), pot corecta zgomotul, deplasarea aleatorie și instabilitatea deviației în timpul funcționării normale a AMR-urilor. Prin utilizarea măsurătorilor accelerației datorate gravitației Pământului, erorile de înclinare și rulare ale giroscopului pot fi corectate. În cele din urmă, deriva biasului poate fi urmărită și corectată. În funcționare, EKF permite estimarea eficientă a stărilor trecute, prezente și viitoare, chiar și în absența unei cunoașteri complete a naturii sistemului modelat.
EKF a câștigat o utilizare pe scară largă deoarece poate modela dinamica sistemului și incertitudinile de măsurare, apoi poate actualiza estimarea stării atunci când sosesc date noi. Măsurătorile, care pot conține zgomot alb gaussian sau alte inexactități, sunt observate în timp și utilizate pentru corectare. Filtrul estimează valoarea reală a măsurătorilor prin sincronizarea măsurătorilor între senzori, predicția estimărilor de poziție și eroare și estimarea și actualizarea incertitudinii valorii prezise.
Algoritmi de fuziune a senzorilor
Algoritmii de fuziune a senzorilor sunt încorporați în pachetul open-source robot_localization din cadrul Robot Operating System (ROS),4 care implementează fuziunea bazată pe EKF și utilizează algoritmul EKF în nucleul său (Figura 10).
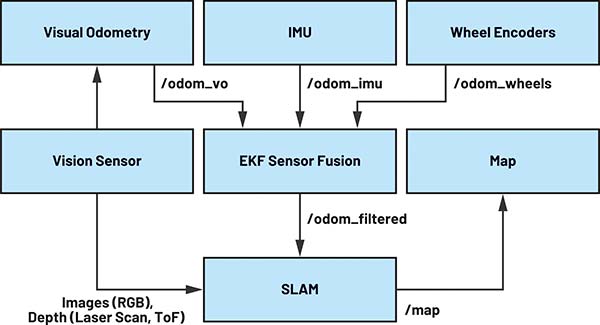
Figura 10: Arhitectură software de fuziune a senzorilor bazată pe ROS, în care pachetul robot_localization combină mai multe intrări pentru o estimare robustă și continuă a poziției. (Sursa imaginii: Analog Devices)
Acest pachet ROS permite fuziunea unui număr nelimitat de senzori și poate accepta o varietate de tipuri de intrări, inclusiv date IMU, viteza roților și odometrie. Ieșirea fuzionată include poziția și orientarea 3D complete, vitezele liniare și unghiulare și accelerația, care alimentează direct algoritmii de navigație și SLAM. Pe baza acestor intrări, robot_localization generează o stare estimată a sistemului, exprimată sub forma unui vector de mărimi măsurate și derivate:
Starea sistemului = (X, Y, Z, rulare, înclinare, deviere, X˙, Y˙, Z˙, rulare˙, înclinare˙, deviere˙, X¨, Y¨, Z¨)
Accelerați dezvoltarea unui sistem precis de localizare pentru AMR
IMU-ul ADIS16500AMLZ demonstrează modul în care senzorii de precizie și procesarea integrată pot îmbunătăți performanța de localizare a AMR-urilor. Pentru a ajuta dezvoltatorii să accelereze dezvoltarea aplicațiilor, Analog Devices oferă placa breakout ADIS16500/PCBZ (Figura 11, stânga) și sistemul de evaluare EVAL-ADIS-FX3Z (Figura 11, dreapta).

Figura 11: Placa breakout ADIS16500/PCBZ (stânga) și kitul de evaluare EVAL-ADIS-FX3Z (dreapta) permit dezvoltarea rapidă a aplicațiilor bazate pe IMU-ul ADIS16500. (Sursa imaginii: Analog Devices)
Placa conține unitatea IMU și un conector cu 16 pini, compatibil cu cabluri panglică de 2 mm, pentru conectarea la sistemul de evaluare. Acesta permite eșantionarea în timp real a unității IMU la rata maximă de eșantionare și este alimentat prin portul USB. Toate programele software necesare pot fi descărcate de pe pagina de resurse.
Concluzie
IMU-urile sunt esențiale pentru menținerea unei localizări precise în AMR-uri, furnizând estimări de orientare și urmărirea mișcării la rate de actualizare ridicate, chiar și atunci când alte tipuri de senzori eșuează din cauza condițiilor de mediu. Prin utilizarea fuziunii senzorilor pentru a compensa limitările fiecărei modalități de detecție, AMR-urile pot realiza o navigare fiabilă chiar și în medii dinamice care, în mod normal, ar compromite localizarea. Datorită disponibilității IMU-urilor puternic integrate, precum și a plăcilor de breakout și a sistemelor de evaluare asociate, dezvoltatorii pot proiecta rapid AMR-uri capabile să asigure nivelul de precizie și fiabilitate necesar pentru o navigare sigură și eficientă.
 Autor: Rolf Horn – Inginer de aplicații
Autor: Rolf Horn – Inginer de aplicații
Rolf Horn, inginer de aplicații la DigiKey, face parte din grupul european de asistență tehnică din 2014, având responsabilitatea principală de a răspunde la orice întrebări legate de dezvoltare și inginerie de la clienții finali din EMEA, precum și de a scrie și corecta articole și bloguri în limba germană pe platformele TechForum și maker.io ale DK. Înainte de DigiKey, a lucrat la mai mulți producători din domeniul semiconductorilor, axându-se pe sisteme embedded FPGA, microcontrolere și procesoare pentru aplicații industriale și auto.
Rolf deține o diplomă în inginerie electrică și electronică de la Universitatea de Științe Aplicate din München, Bavaria și și-a început cariera profesională la un distribuitor local de produse electronice în calitate de arhitect de soluții de sistem pentru a-și împărtăși cunoștințele și expertiza în continuă creștere în calitate de consilier de încredere. Hobby-uri: petrecerea timpului cu familia + prietenii, călătoriile cu autorulota personală VW-California și plimbarea cu motocicleta, un BMW GS 100 din 1988.
DigiKey | https://www.digikey.ro
![]()
Referințe
- Shoudong Huang and Gamini Dissanayake, Robot Localization: An Introduction, John Wiley & Sons, August 2016.
- Randy Carver and Mark Looney, “MEMS Accelerometer Calibration Optimizes Accuracy for Industrial Applications,” EE Times, October 2007.
- Oliver J. Woodman, “An Introduction to Inertial Navigation,” University of Cambridge, August 2007.
- robot_localization Documentation, v2.6.12, Tom Moore, 2016.
Glosar de termeni
- AMR (Autonomous Mobile Robot) – Robot mobil autonom capabil să navigheze și să ia decizii în mod independent, utilizat frecvent în logistică, producție și depozite inteligente.
- IMU (Inertial Measurement Unit) – Unitate de măsurare inerțială care integrează accelerometre și giroscoape (și uneori magnetometre) pentru a măsura accelerația, viteza unghiulară și orientarea unui sistem.
- Accelerometru triaxial – Senzor MEMS care măsoară accelerația de-a lungul a trei axe ortogonale (x, y, z), inclusiv accelerația gravitațională.
- Giroscop triaxial – Senzor care măsoară viteza unghiulară în jurul celor trei axe spațiale, permițând urmărirea rotației și orientării.
- Fuziune de senzori – Proces de combinare a datelor provenite de la mai mulți senzori (IMU, LiDAR, camere, encodere etc.) pentru a obține o estimare mai precisă și mai robustă a poziției și orientării.
- EKF (Extended Kalman Filter) – Algoritm de estimare a stării utilizat pe scară largă în robotică pentru a combina datele zgomotoase ale senzorilor și a corecta deriva și erorile de măsurare.
- SLAM (Simultaneous Localization and Mapping) – Tehnică prin care un robot construiește simultan o hartă a mediului și își determină poziția în cadrul acesteia.
- Odometrie a roților – Metodă de estimare a poziției robotului pe baza rotației roților, utilizând encodere.
- ARW (Angle Random Walk) – Indicator al zgomotului aleator al giroscopului, care influențează precizia pe termen lung.
- VRW (Velocity Random Walk) – Indicator al zgomotului aleator al accelerometrului, care afectează estimarea vitezei și poziției.
- Breakout board (placă breakout) – Placă de interfațare care permite acces facil la pini și semnale ale unui circuit integrat, utilizată în prototipare și evaluare.