

 Motoarele de curent continuu fără perii (BLDC) sunt parte integrantă la nivelul producției industriale, fiind utilizate în principal în aplicații de acționare, poziționare, de viteză variabilă sau servo. În aceste aplicații, controlul precis al mișcării și funcționarea stabilă sunt critice. Deoarece motoarele BLDC operează pe principiul unui câmp magnetic în mișcare pentru a produce cuplul motorului, măsurarea exactă a cuplului și vitezei motorului reprezintă principala provocare legată de control atunci când se proiectează un sistem BLDC industrial.
Motoarele de curent continuu fără perii (BLDC) sunt parte integrantă la nivelul producției industriale, fiind utilizate în principal în aplicații de acționare, poziționare, de viteză variabilă sau servo. În aceste aplicații, controlul precis al mișcării și funcționarea stabilă sunt critice. Deoarece motoarele BLDC operează pe principiul unui câmp magnetic în mișcare pentru a produce cuplul motorului, măsurarea exactă a cuplului și vitezei motorului reprezintă principala provocare legată de control atunci când se proiectează un sistem BLDC industrial.
Pentru a determina cuplul motorului BLDC, trebuie măsurați simultan doi dintre cei trei curenți de fază, cu ajutorul unui convertor analog-digital (ADC) multicanal, cu eșantionare simultană. Un microcontroler înzestrat cu algoritmi potriviți calculează al treilea curent de fază. Acest proces reflectă o imagine precisă, instantanee a condiției motorului, un pas cheie în dezvoltarea unui sistem robust și de mare precizie pentru controlul cuplului motorului.
Acest articol va prezenta pe scurt problemele asociate obținerii unui control precis al cuplului, inclusiv un mijloc economic de implementare a unui rezistor de șunt necesar. Apoi, vor fi prezentate amplificatorul diferențial de precizie AD8479 și convertorul analog-digital cu dublă eșantionare și registru de aproximare succesivă (SAR-ADC) AD7380, ambele de la Analog Devices și se va arăta cum pot fi ele utilizate pentru a se obține măsurări de precizie pe faze pentru proiectarea unui sistem robust.
Cum funcționează motoarele BLDC
Un motor BLDC este un motor sincron cu magneți permanenți cu o formă de undă cu forță contra-electromotoare (EMF). Mărimea fizică observată a forței contra-electromotoare nu este constantă; ea se modifică atât cu cuplul, cât și cu viteza rotorului. Deși sursa de tensiune DC nu comandă direct motorul BLDC, principiul de bază al funcționării motorului BLDC este similar cu cel al unui motor DC.
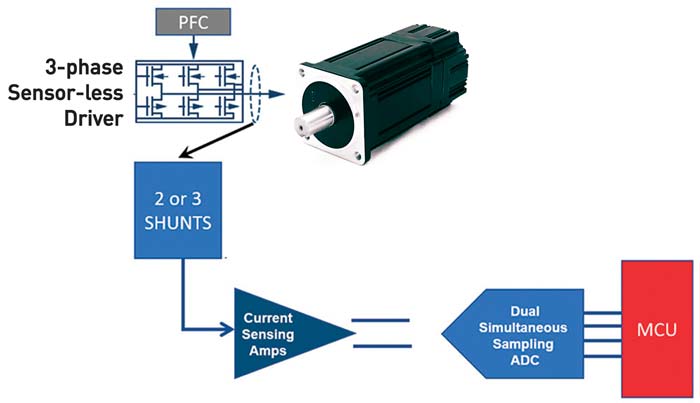
Figura 1: Sistemul de control al motorului conține un PFC pentru stabilizarea puterii, un driver trifazat fără senzori pentru înfășurările motorului BLDC, rezistențe de șunt și amplificatoare de detecție curent, un ADC cu eșantionare dublă simultană și un microcontroler. (Sursă imagine: Digi-Key Electronics)
Motorul BLDC dispune de un rotor cu magneți permanenți și de un stator cu înfășurări inductive. Acest tip de motor este în esență un motor de curent continuu inversat, prin eliminarea periilor și comutatorului, înfășurările fiind conectate direct la electronica de control. Sistemul electronic de control înlocuiește funcția de comutator și energizează înfășurările în secvența corectă pentru a obține mișcarea necesară. Înfășurările alimentate după un model sincronizat și echilibrat produc rotația în jurul statorului. Înfășurarea alimentată de pe stator conduce magnetul rotorului și comută odată ce rotorul se aliniază cu statorul.
Sistemul de motor BLDC necesită un driver de motor BLDC trifazat, fără senzori, care generează curenții în cele trei înfășurări ale motorului (Figura 1). Circuitul este alimentat printr-un etaj digital cu PFC (corecția factorului de putere), cu control al curentului de pornire, care furnizează o putere stabilă pentru driverul trifazat fără senzori.
Trei curenți de excitație comandă motorul BLDC, fiecare energizând și creând fazele în înfășurări, fiecare cu diferite faze, care împreună dau 360°. Valorile diferite ale fazelor sunt semnificative: întrucât excitația celor trei brațe menține un total de 360°, acestea se echilibrează uniform până la 360°, de exemplu, 90° + 150° + 120°.
Deoarece curentul în toate cele trei înfășurări trebuie cunoscut în orice moment de timp, având în vedere că sistemul este echilibrat, este suficientă măsurarea curenților a numai două dintre cele trei înfășurări. A treia înfășurare este calculată cu ajutorul unui microcontroler. Pentru primele două înfășurări, detecția se poate face simultan utilizând rezistențe de șunt și amplificatoare de detecție curent.
Capătul căii de semnal necesită un convertor analog-digital (ADC) cu eșantionare dublă simultană, care trimite datele de măsurare digitale către microcontroler. Magnitudinea, faza și temporizarea fiecărui curent de excitație oferă informațiile legate de cuplu și viteză, necesare pentru un control precis.
Detecția curentului utilizând rezistori realizați din traseul de cupru de pe circuitul imprimat
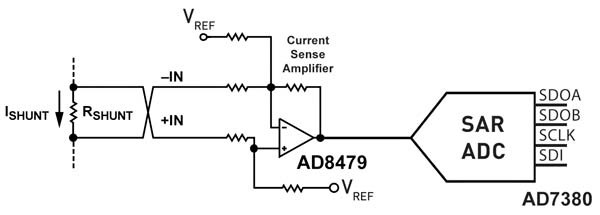
Figura 2: Sistem de detecție a fazelor motorului utilizând un rezistor de șunt de curent (RSHUNT) pentru a măsura faza instantanee a motorului cu un amplificator de mare precizie, precum AD8479 de la Analog Devices și un convertor ADC de înaltă rezoluție (AD7380). (Sursă imagine: Digi-Key Electronics)
Deoarece s-a menționat despre importanța preciziei măsurătorii și a achiziției de date, procesul începe evident cu dezvoltarea unei căi eficiente și economice de a detecta semnalul de fază din înfășurarea motorului BLDC. Acest lucru poate fi realizat prin integrarea în circuitul imprimat a unui rezistor de șunt de valoare mică (RSHUNT) și prin utilizarea unui amplificator de detecție curent pentru a detecta căderile de tensiune pe acest mic rezistor (Figura 2). Presupunând că valoarea rezistorului este suficient de mică, căderea de tensiune va fi, de asemenea, mică, iar strategia de măsurare va avea un efect minim asupra circuitului motorului.
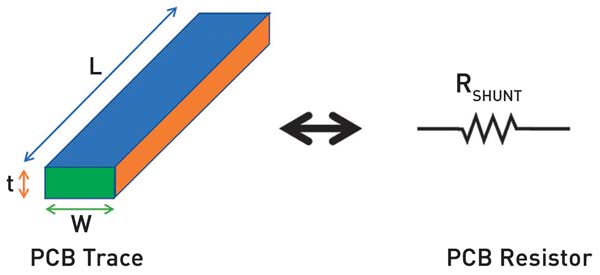
Figura 3: Tehnicile de creare atentă a traseului circuitului imprimat de pe plăcuța PCB, reprezintă a modalitate economică de a crea valoarea potrivită pentru RSHUNT. (Sursă imagine: Digi-Key Electronics)
În Figura 2, amplificatorul de detecție a curentului captează căderea instantanee de tensiune IPHASE × RSHUNT. Apoi SAR-ADC digitizează acest semnal. Valoarea selectată a rezistorului de șunt de curent implică luarea în considerare a interacțiunilor între RSHUNT, VSHUNT, ISHUNT și erorile de intrare ale amplificatorului.
O creștere a RSHUNT cauzează o creștere a VSHUNT. Vestea bună este că acest lucru scade importanța erorilor derivei de tensiune al amplificatorului (VOS) și a derivei curentului de polarizare de intrare (IOS). Totuși, pierderea de putere datorată ISHUNT × RSHUNT, la valori ridicate ale RSHUNT, reduce eficiența energetică a sistemului. De asemenea, puterea necesară datorată rezistorului RSHUNT are impact asupra siguranței de funcționare a sistemului, deoarece disiparea de putere datorată ISHUNT × RSHUNT poate produce o auto-încălzire, ce poate conduce la o schimbare a valorii nominale a RSHUNT.
Pentru alegerea RSHUNT, sunt disponibile diverse opțiuni de rezistoare de uz special. Cu toate acestea, o alternativă economică ar fi prin realizarea unui traseu pe placa de circuit imprimat, care să ofere rezistența pentru RSHUNT (Figura 3).
Calculul traseului de circuit imprimat pentru RSHUNT
Deoarece temperatura poate fi extremă în aplicații industriale, este importantă luarea în considerare a temperaturii la proiectarea unui rezistor de șunt pe placă. În figura 3, coeficientul de temperatură (α20) al unui rezistor de șunt obținute din traseul de cupru de circuit imprimat, la 20°C este de aproximativ +0.39%/°C (coeficientul variază în funcție de temperatură). Lungimea (L), grosimea (t), lățimea (W) și rezistivitatea (rñ) determină rezistența traseului de circuit imprimat.
Dacă o placă de circuit imprimat are 1 uncie (ounce – oz = 28.35 grame) de cupru (Cu), grosimea (t) este egală cu 1.37 miimi de inch, iar rezistivitatea (r) este egală cu 0.6787 microohmi pe inch. Aria traseului este măsurată în concordanță cu numărul de pătrate elementare ce formează o anumită lungime L de traseu. Latura pătratului elementar () este egală cu lățimea W a traseului, iar numărul acestora este dat de raportul L/W. De exemplu, un traseu cu lungimea L= 2 inch (in.) și lățimea W= 0.25 inch este o structură cu 8 pătrate elementare ().
Cu ajutorul variabilelor de mai sus, valoarea rezistenței traseului de cupru de pe placa de 1 oz, R, la temperatura camerei, este calculată utilizând Ecuația 1:
R ≈ r/t (1 + α20 (T – 20)) ≈ 0.50 miliohms (mW) / ⎕ (1 + 0.39%/°C (T – 20˚)) – Ecuația 1
Unde T = temperatura rezistorului.
De exemplu, pornind de la un curent inițial de 1A (maxim) per braț motor BLDC, pentru un traseu de circuit imprimat din Cupru de 1oz., cu lungimea rezistorului RSENSE (L) de 1 in. și o lățime a traseului de 0.05 in., RSHUNT la 20°C poate fi calculată utilizând Ecuațiile 2 și 3:
L/W=număr de pătrate (⎕) = 1 in / 0.050 in = 20 pătrate – Ecuația 2
RSHUNT = (L/W) × R = (20 ⎕) × 0.50 mW / ⎕ = 10 mW – Ecuația 3
Disiparea de putere a acestui rezistor cu un șunt de curent de 1A este calculată utilizând Ecuația 4:
PSHUNT = ISHUNT2 × RSHUNT = 1A2 × 10 mW = 0.1 watt – Ecuația 4
Conversia ADC cu eșantionare simultană
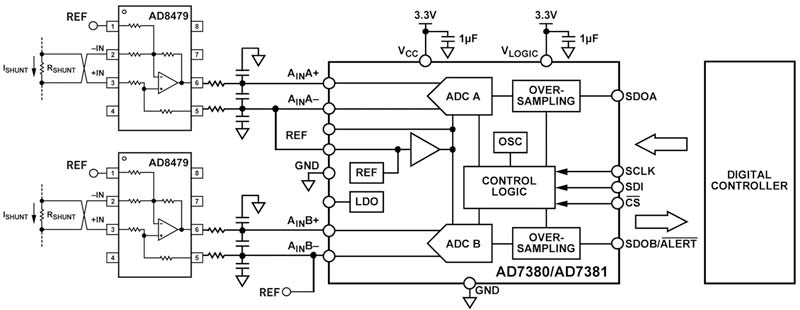
Figura 4: Un SAR-ADC cu eșantionare dublă simultană, rapid și cu zgomot redus, precum AD7380, poate capta imaginea curentă a două dintre înfășurările motorului. (Sursă imagine: Digi-Key Electronics)
Convertorul analog-digital (ADC) din figura 2 convertește tensiunea la un punct din ciclul de fază într-un format digital. Este esențial ca tensiunea de fază simultană a celor trei înfășurări să facă parte din această măsurătoare. Întrucât acesta este un sistem echilibrat (așa cum s-a menționat mai sus), doar două din cele trei înfășurări trebuie să fie măsurate; un microcontroler extern calculează tensiunea de fază pentru cea de a treia înfășurare.
 Un convertor ADC potrivit pentru acest sistem de control al motorului este AD7380 SAR-ADC cu eșantionare duală simultană (Figura 4).
Un convertor ADC potrivit pentru acest sistem de control al motorului este AD7380 SAR-ADC cu eșantionare duală simultană (Figura 4).
În Figura 4, AD8479 este un amplificator diferențial de precizie cu o plajă foarte mare a tensiunii de intrare de mod comun (±600 volți) pentru a face față variațiilor largi ale curentului de comandă al motorului, de la driverul tri-fazat fără senzori. Caracteristicile AD8479 sunt de asemenea natură încât el poate înlocui amplificatoare de izolație scumpe în aplicații care nu necesită izolație galvanică.
Caracteristicile cheie ale AD8479 includ, de asemenea, tensiune de decalaj (offset) redusă, derivă (drift) redusă a tensiunii de offset, derivă redusă de câștig, derivă redusă a rejecției de mod comun și un excelent factor de rejecție de mod comun (CMRR – Common-Mode Rejection Ratio) pentru a compensa schimbările rapide de la nivelul motorului.
AD7380/AD7381 sunt convertoare analogic-digitale SAR-ADC cu eșantionare dublă simultană, pe 16-biți/14-biți, de mare viteză și joasă putere, caracterizate de o viteză de transfer de până la 4 Meșantioane/s. Intrarea analogică diferențială acceptă o gamă largă a tensiunii de intrare de mod comun. Este inclusă o referință internă de tensiune (REF), de 2.5V.
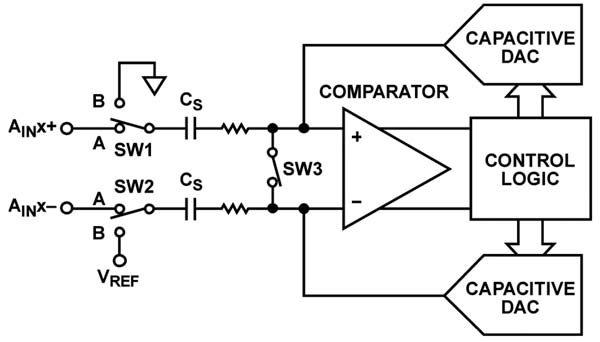
Figura 5: Este prezentat etajul de conversie ADC pentru unul dintre cele două canale ale AD7380. Achiziția semnalului începe atunci când SW3 este deschis, iar SW1 și SW2 sunt închise. În acest punct, tensiunea de pe condensatoarele CS produce schimbări la AINx+ și AINx-, cauzând dezechilibrul intrărilor în comparator. (Sursă imagine: Analog Devices)
Pentru a atinge un control precis al cuplului și vitezei, structura SAR-ADC cu eșantionare dublă simultană realizează captarea instantanee a ieșirii amplificatorului de detecție a curentului. Pentru aceasta, AD7380/AD7381 dispune de două convertoare analogic-digitale interne, identice, sincronizate în timp. De asemenea, fiecare dispune de un etaj de intrare capacitiv cu o rețea de redistribuire a încărcării capacitive (Figura 5).
În Figura 5, VREF și masa sunt tensiunile inițiale prin condensatoarele de eșantionare CS. Deschizând SW3 și închizând SW1 și SW2 se inițiază achiziția semnalului. Când SW1 și SW2 se închid, tensiunea prin condensatoarele de eșantionare, CS, modifică tensiunea la AINx+ și AINx-, cauzând dezechilibrul intrărilor comparatorului. SW1 și SW2 sunt apoi deschise, iar tensiunea este colectată prin CS.
Procesul de colectare a tensiunii CS implică utilizarea convertoarelor digital – analogice (DAC). Acestea adaugă și scad cantități fixe de energie de la CS pentru a aduce comparatorul înapoi în condiția de echilibru. În acest punct, conversia este completă, SW1 și SW2 sunt deschise, iar SW3 este închis pentru a elimina încărcarea reziduală și pentru a pregăti noul ciclu de eșantionare.
Pe durata conversiei DAC, logica de control generează codul de ieșire ADC, iar datele sunt accesate de la dispozitiv printr-o interfață serială.
Concluzie
Măsurarea precisă a cuplului și vitezei motorului BLDC începe cu un rezistor de șunt precis și ieftin. După cum s-a putut observa, utilizând un traseu de circuit imprimat, acest lucru poate fi implementat eficient din punct de vedere al costurilor.
Prin adăugarea acestuia la o combinație de amplificator de detecție curent AD8479 și un convertor SAR-ADC cu eșantionare simultană, AD7380, un proiectant poate crea un sistem de măsurare a cuplului și vitezei motorului robust și de înaltă precizie, destinat aplicațiilor de control în medii ostile.

Autor: Rolf Horn – Inginer de aplicații
Rolf Horn, face parte din grupul European de Asistență Tehnică din 2014, având responsabilitatea principală de a răspunde la întrebările venite din partea clienților finali din EMEA referitoare la Dezvoltare și Inginerie, precum și la scrierea și corectarea articolelor și postărilor de pe platformele TechForum și https://maker.io ale firmei Digi-Key pentru cititorii din Germania. Înainte de Digi-Key, el a lucrat la mai mulți producători din zona semiconductorilor, cu accent pe sistemele embedded ce conțin FPGA-uri, microcontrolere și procesoare pentru aplicații industriale și auto. Rolf este licențiat în inginerie electrică și electronică la Universitatea de Științe Aplicate din Munchen, Bavaria. Și-a început cariera profesională la un distribuitor local de produse electronice în calitate de Arhitect pentru Soluții de Sistem pentru a-și împărtăși expertiza și cunoștințele în calitate de consilier de încredere.
Hobby-uri: petrecerea timpului cu familia + prietenii, călătoriile (cu rulota familiei VW-California) și motociclismul (pe un BMW GS din 1988).
Digi-Key Electronics | https://www.digikey.ro
![]()