

Astfel, fie că este vorba despre un braţ robotic de fabrică, un vehicul robotizat sau ceva precum roboţii anticipaţi de SF, cu braţe, picioare şi feţe animate, precizia cu care operează bucla de reacţie de control este cea care furnizează mişcarea graţioasă şi precizia de poziţionare necesare aplicaţiilor solicitante de astăzi. Această precizie depinde de reţeaua de senzori pentru detectarea înclinării, rotaţiei, acceleraţiei, şocurilor, vibraţiilor şi proximităţii.
Progresele în ceea ce priveşte senzorii bazaţi pe tehnologia sistemelor micro-electromecanice (MEMS) oferă soluţii la toate cerinţele.
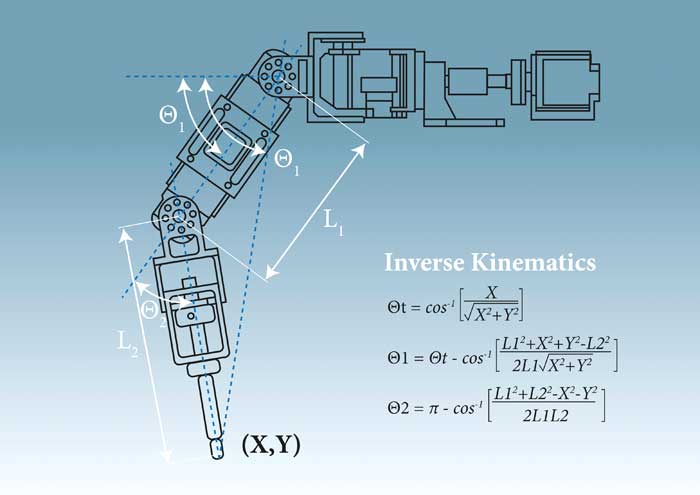
Figura 1: Calcularea unghiului de înclinare cerut de poziţionarea braţului robotic.
Accelerometre ce măsoară înclinarea
Înclinarea este în general înţeleasă ca o măsurare de unghi relativă la un plan de referinţă sau axă de referinţă, precum în cazul înclinaţiei Pământului. În robotică, înclinarea este utilizată pentru determinarea poziţiei unui braţ robotic. Mişcarea poate fi considerată a fi într-un plan (2 axe), cu o măsurare a rotaţiei oferită de măsurarea poziţiei celei de a treia axe, ce poate fi cerută sau implementată ca o măsurare completă pe 3 axe.
Acolo unde unghiurile de înclinare sunt măsurate direct, de exemplu la nivelul articulaţiilor braţului robotic (după cum se poate observa în figura 1), comanda robotului de a muta capătul braţului către nişte coordonate dorite X-Y, necesită utilizarea unui model complex cinematic invers pentru a calcula semnalele necesare comenzilor motoarelor din articulaţii, pentru a atinge acea poziţie.
Accelerometrele oferă o abordare alternativă de măsurare a înclinării, în care senzorii detectează o schimbare în direcţia acceleraţiei gravitaţionale. Această caracteristică va fi familiară oricui are un telefon inteligent ce încorporează senzori low-g MEMS pentru schimbarea orientării ecranului atunci când telefonul este rotit.
Informaţia oferită în cazul braţului robotic este numai subiectul acceleraţiei statice datorate gravitaţiei (de exemplu în domeniul ±1g) şi nu este afectată de braţul ce loveşte un obiect sau care atinge o limită de cursă, ceea ce ar conduce la un semnal mai mare. Pentru detecţia simplă în două dimensiuni, poate fi utilizat un accelerometru pe 2 axe, pentru a oferi detecţia ruliului şi tangajului. Acest lucru este însă potrivit cu adevărat doar în cazul în care planul de operare X-Y este paralel cu suprafaţa Pământului, adică perpendicular pe forța gravitațională, în caz contrar sensibilitatea măsurării înclinării este redusă. Accelerometrele pe 3-axe, precum ADXL345, de la Analog Device Inc. (ADI) evită această limitare şi pot oferi o soluţie de detecţie a înclinării complet tridimensională. În vreme ce acest dispozitiv oferă rezoluţii de ±2g, ±4g, ±8g şi ±16g, pentru detecţia înclinării se recomandă utilizarea domeniului ±2g, deoarece acesta oferă cea mai mare precizie la măsurarea acceleraţiei înclinării datorită gravitației, care este ±1g (sau jumătate din domeniul său de 13-biţi).
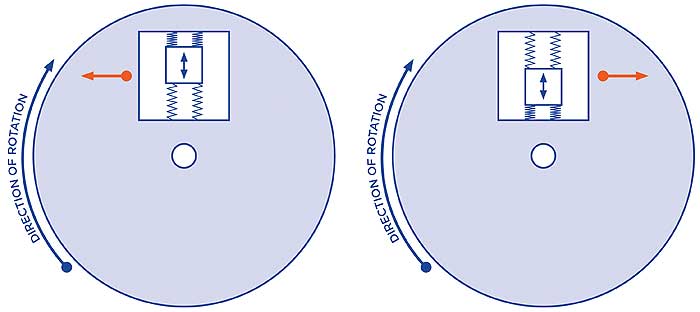
Figura 2: Operarea unui senzor giroscopic MEMS (cu amabilitatea Analog Devices).
Giroscoapele măsoară rotaţia
Mişcări de rotaţie sau unghiulare apar în robotică atunci când un braţ sau o unealtă, precum burghiu sau şurubelniţă, se rotesc în jurul unei singure axe. Măsurarea rotaţiei poate completa, de asemenea, măsurarea duală a axei de înclinare pentru a oferi o poziţionare completă tridimensională, putând, de asemenea, să suplinească o limitare a accelerometrelor pe 3 axe, întâlnită atunci când rotaţia este în jurul axei Z, perpendiculară pe Pământ. În această situaţie, nu există mişcare în planul X-Y, astfel încât aceste axe vor măsura 0g, în vreme ce axa Z va continua să măsoare forţa gravitaţională completă de 1g, astfel că nu vor fi schimbări în citirile de la accelerometru.
Un giroscop MEMS este un tip de senzor special proiectat pentru a detecta rotaţia prin măsurarea mişcării unei mase foarte mici, micro-prelucrate în cadrul senzorului (vezi figura 2), mişcare datorată efectului Coriolis.
Giroscoapele sunt caracterizate de domeniul şi de sensibilitatea lor, astfel încât este important de selectat un dispozitiv cu specificațiile potrivite pentru o anumită aplicaţie. Domeniul reprezintă viteza de rotaţie cea mai mare, în °/sec, ce poate fi măsurată cu precizie. Sensibilitatea este schimbarea ieşirii, în mV, la o viteză dată şi este măsurată în mV/°/sec. Senzorul pe 16 biţi, FXAS21002C, de la NXP este un giroscop pentru ruliu, tangaj, giraţie, cu un domeniu dinamic reglabil de la ±250°/s la ±2000°/s. Acest dispozitiv compact (capsulă QFN cu 24 de terminale), de joasă putere (2.7mA în mod activ), poate măsura viteze unghiulare de până la ±2000°/s, cu o frecvenţă a datelor de ieşire ce atinge 800Hz. La o viteză de ±2000°/s este asigurată o sensibilitate de 0,0625°/s. Filtrul trece jos integrat permite ca aplicaţia gazdă să limiteze lăţimea de bandă a semnalului digital. Dispozitivul dispune de interfeţe I2C şi SPI.
Giroscopul pe 3 axe, 16 biţi, ieşire digitală, I3G4250D de la STMicroelectronics, prezintă o stabilitate puternică la nivele de zero şi menţine o stabilitate ridicată cu temperatura şi în timp.
Utilizatorii pot selecta domeniul complet care se potriveşte cel mai bine necesităţilor specifice – ±245/±500/±2000°/s. Pe lângă elementul senzorial, dispozitivul integrează, de asemenea, toată tehnologia de interfaţare senzorială necesară. Viteza unghiulară este furnizată prin interfaţă SPI (fiind disponibilă de asemenea şi opţiunea de I2C). Este suportat un domeniu de temperatură de operare de la -40°C la +85°C.
Utilizând tehnologia sa patentată iSensor, ADIS16266BCCZ de la ADI dispune de o lăţime de bandă extinsă de 360Hz. Acest dispozitiv poate fi utilizat pentru a măsura mişcări de rotaţie de mare viteză prin performanţa sa de ±14000°/s. Dispozitivul dispune de control automat şi manual al corecţiei erorii sistematice.
Accelerometrele măsoară, de asemenea, şocurile
La analiza utilizării accelerometrelor pentru măsurarea înclinării, s-a menţionat că măsurarea înclinării presupune că nu există acceleraţii datorate şocului, precum decelerare rapidă datorită opririi bruşte a braţului la impactul cu un alt obiect. Un astfel de şoc poate fi detectat cu uşurinţă cu ajutorul unui accelerometru, dar aproape sigur va ieşi din domeniul de ±1g al accelerometrului de înclinare, în funcţie de locul în care este plasat accelerometrul (de exemplu va fi mai mare pentru un senzor aflat la capătul braţului, faţă de unul mai apropiat de batiu.
O altă diferenţă în operaţiile necesare la nivelul accelerometrelor pentru a detecta şocurile, faţă de măsurarea înclinării, este aceea că răspunsul trebuie să fie rapid. În acelaşi mod în care accelerometrul dintr-un hard drive al unui laptop trebuie să parcheze capul de citire în câteva milisecunde pentru a evita deteriorarea suprafeţei discului, accelerometrul utilizat pentru detecţia şocurilor într-un sistem robotic trebuie să semnaleze rapid problema pentru a preveni deteriorarea robotului sau a mediului dimprejurul său, sau mai grav, rănirea unei persoane. Pentru aceasta, poziţionarea accelerometrului trebuie aleasă cu grijă, iar ieşirea sa trebuie monitorizată ca parametru critic pentru a asigura opţiuni de acţiuni prioritare.
Utilizarea senzorilor MEMS pentru detectarea vibraţiilor
Detectarea vibraţiilor în oricare maşină reprezintă adesea o chestiune de siguranţă, deoarece în general vibraţiile nu sunt dorite, cel mai adesea apariţia lor fiind simptomul unor componente ce se defectează, trebuind realizate operaţiuni de întreţinere. Pentru roboţii industriali, monitorizarea vibraţiilor poate fi necesară pentru a asigura operarea continuă fără probleme, iar în cazuri extreme pentru a implementa rutine de închidere sigure. Senzorii de vibraţie bazaţi pe MEMS, cu transceivere RF integrate pot oferi soluţii de detecţie eficiente, prin care să se monitorizeze şi înregistreze vibraţiile în mediile industriale.
În mod surprinzător accelerometrele măsoară, de asemenea, şi accelerația!
Mișcarea lină a roboților, sau a brațelor robotice implică accelerații şi decelerații, cum ar fi de exemplu creșterea graduală și descreșterea vitezei (în special la pornirea, sau la întoarcerea din/în poziția de repaus). Un accelerometru MEMS dedicat poate fi utilizat pentru detectarea precisă şi controlul acestui comportament, asigurându-se că robotul se poate apropia cu precizie şi poate să preia un obiect, iar apoi să îl pună jos cu grijă exact în locul potrivit, fără stricăciuni. Această capabilitate este demonstrată de roboții capabili de a ridica și muta ouă crude, fără a le scăpa sau distruge.
De asemenea, este vitală determinarea accelerațiilor și decelerațiilor excesive şi în situațiile în care roboții se afla sub influența unor forțe externe.
Fuziune de senzori
Deoarece dispozitivele MEMS devin din ce în ce mai utilizate în sistemele senzoriale, cresc și posibilitățile de a realiza fuziuni între senzori. Capturarea simultană a datelor pentru numeroși senzori diferiți (de exemplu accelerometre, giroscoape, magnetometre, senzori de presiune etc.), acompaniată de algoritmi de filtrare digitali potriviți, va permite inginerilor să diminueze deficiențele pe care orice tip de senzor particular le are atunci când funcționează izolat. Acest lucru va conduce la îmbunătățirea performanțelor operaționale (în termeni de precizie, liniaritate, sensibilitate și rezoluție), combătând în același timp și problema devierilor în cazul senzorilor. Suplimentar, reducerea costurilor legate de materiale, a consumului global de energie și a spațiului ce trebuie alocat, pot fi avantaje suplimentare. În robotică, combinația dintre funcțiile de detecție ale unui accelerometru pe 3 axe și ale unui giroscop pe 3 axe înseamnă posibilitatea de achiziționare a datelor măsurate cu privire la viteza unghiulară atunci când sistemul se deplasează și determinarea cu precizie ridicată a unghiului de înclinare atunci când sistemul este staționar. Adunând aceste date împreună se poate obține o privire cuprinzătoare asupra mișcării robotului (acoperind ruliu, tangaj, girație etc.).
Concluzie
Aplicațiile de robotică au devenit din ce în ce mai solicitante, nemaifiind acceptate mișcările greoaie și aproape comice ale sistemelor robotice de odinioară. Acum a devenit obligatorie o operare lină și precisă, care realizează un echilibru între putere, delicatețe și versatilitate – iar acest lucru necesită senzori avansați pentru a oferi reacția necesară pentru un control rafinat și sigur. Tehnologia MEMS oferă o cale de mers înainte, cu accelerometre și giroscoape capabile de a măsura înclinarea, rotația, vibrația și accelerația. Prin utilizarea acestor dispozitive, este acum posibilă îmbunătățirea performanțelor sistemelor și a siguranței operaționale, reducând considerabil și costurile implicate.
Autor:

Mark Patrick, Mouser Electronics

Mouser Electronics | http://ro.mouser.com