

 Toate acestea permit, în ansamblu, o metodologie de fabricație eficientizată, care favorizează o implementare a celulelor robotizate inteligentă și flexibilă, susținând cererea pieței și a legislației la un nivel mai ridicat pentru un flux de producție mai bun și chiar mai durabil. În acest articol se va discuta despre îmbunătățirea tehnologică a acestor senzori, despre integrarea fuziunii și despre metodele de implementare, cu tema generală a conștientizării mediului în timp real. Pe scurt, implementarea unui sistem de producție mai flexibil și mai scalabil va face ca integrarea și proiectarea robotică să evolueze și să avanseze în viitor.
Toate acestea permit, în ansamblu, o metodologie de fabricație eficientizată, care favorizează o implementare a celulelor robotizate inteligentă și flexibilă, susținând cererea pieței și a legislației la un nivel mai ridicat pentru un flux de producție mai bun și chiar mai durabil. În acest articol se va discuta despre îmbunătățirea tehnologică a acestor senzori, despre integrarea fuziunii și despre metodele de implementare, cu tema generală a conștientizării mediului în timp real. Pe scurt, implementarea unui sistem de producție mai flexibil și mai scalabil va face ca integrarea și proiectarea robotică să evolueze și să avanseze în viitor.
Provocarea
Influențate de creșterea cererii globale de aprovizionare, de schimbările regionale și de lipsa forței de muncă, tot mai multe organizații se orientează către instalații de producție mai inteligente și flexibile pentru a face producția mai rentabilă, scalabilă și eficientă. Totuși, din cauza impactului global al pandemiei COVID-19 și a climatului economic în schimbare, aceste eforturi au fost încetinite. De fapt, aproape jumătate (49%) dintre producători au amânat implementările actuale de fabricație inteligentă din cauza acestor două aspecte. Conceptul de fabricație inteligentă și mai flexibilă este o abordare inovatoare pentru optimizarea fluxului de producție cu ajutorul roboților, al senzorilor și al altor dezvoltări pentru automatizarea unor părți ale întregului proces de fabricație. Acest lucru definește, inerent, subsistemele și structura de implementare a fabricii și deschide o nouă cale de urmat în ceea ce privește modul de abordare, proiectare și implementare a sistemelor robotizate, a celulelor robotizate și a integrării acestora în procesul de producție. Există multe sarcini specializate în procesul global care necesită o monitorizare precisă a tuturor sistemelor instalate. Pe lângă unitățile simple de detecție, cum ar fi presiunea, temperatura și debitul, acum, sunt cuantificate și percepția mediului, localizarea sistemelor mobile, optimizarea în timp real a performanțelor de fabricație ale roboților instalați și comunicarea între mașini. Toate acestea sunt puse în aplicare pentru a asigura cel mai înalt randament, pe parcursul întregului proces de fabricație.
Soluția scalabilă
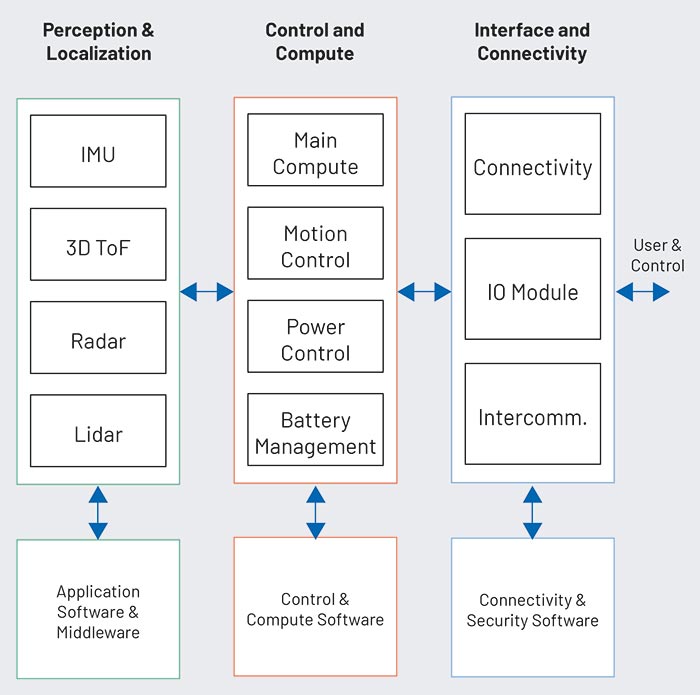
Figura 1 (© ADI)
Integrarea și instalarea sistemelor robotizate depind, în mare măsură, de funcționalitățile și capabilitățile necesare pentru fluxul de fabricație dat. Este foarte important cum s-a definit structura fabricii și cum a fost aceasta gândită și construită pentru a susține procesul de fabricație necesar. În ultimii ani, ecosistemul robotic, inclusiv senzorii, motoarele, mecanismele de acționare, producătorii de scule și multe altele, a făcut presiuni în direcția unei metodologii mai deschise și mai ușor de instalat. Acest impuls, în combinație cu mai multe îmbunătățiri în ceea ce privește performanța de procesare și o mai bună conectivitate în timp real, în condiții de siguranță, permit acum această metodologie. Furnizorii de tehnologii de bază au dezvoltat și adoptat tehnologii mai performante, care susțin un debit de date mai mare și ușor de procesat între domeniul analogic și cel digital într-o implementare de senzori centrală și modulară. Această integrare permite ca un middleware mai avansat să funcționeze fie la limită, fie în unități de calcul mai centralizate, utilizând interconectivitate de performanță mai mare, cum ar fi GMSL (Gigabit Multimedia Serial Layer) sau alte medii de comunicație de înaltă performanță. Diagrama bloc din figura 1, evidențiază o reprezentare (de nivel înalt) a modulelor de bază ale unui sistem autonom. Fiecare dintre module reprezintă un subsistem inteligent, capabil să furnizeze date în timp real de la senzori sau interfață către unitățile de control principale. Aceste blocuri sunt create într-o manieră care acceptă nativ implementarea open-source și, în majoritatea sistemelor robotice, sunt implementate cu ROS (Robotic Operating System), ca interfață software principală între fiecare dintre nodurile sistemului. Comunitatea ROS s-a concentrat în ultima vreme pe perfecționarea atât a aspectelor legate de implementarea în timp real, cum ar fi îmbunătățiri dincolo de tehnologiile de senzori, cât și asupra aspectelor mai complexe ale sistemului în materie de securitate și siguranță.
Percepția modulară și fuziunea avansată a senzorilor
Fuziunea senzorilor realizată într-un mediu în timp real adaugă valoare atât în ceea ce privește vizualizarea, cartografierea și bucla de control pentru motorul robotic, cât și în ceea ce privește beneficiile directe pentru un sistem controlat mai precis și mai conștient în timp real. De exemplu, prin fuziunea percepției (cameră, radar etc.), a informațiilor despre actuatoare și a datelor de localizare, este posibilă optimizarea traiectoriei pentru roboții autonomi fără a pierde informații și date de încredere pentru funcționalitatea robotului din cadrul procesului de producție. Această combinație de senzori îmbunătățește și extinde continuu funcționalitatea sistemului autonom și, în multe cazuri, va maximiza funcționalitatea senzorilor mai presus de ieșirea normală definită, extinzând cunoașterea totală a sistemului dincolo de orice sistem care nu a fost fuzionat.
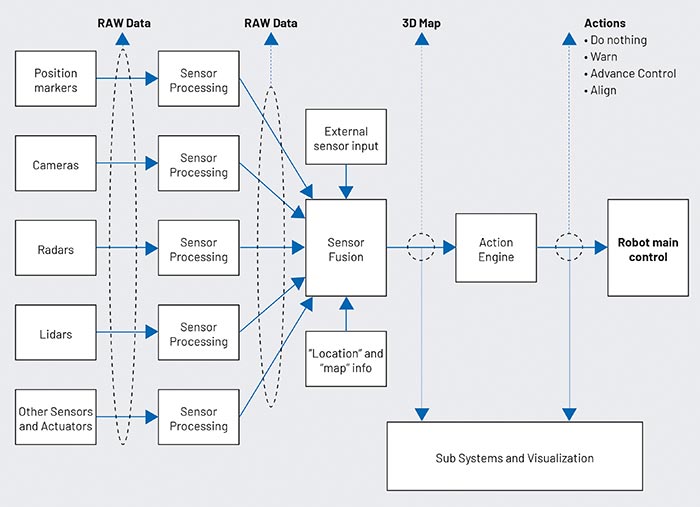
Figura 2 (© ADI)
O metodă de implementare a fuziunii senzorilor este o clasă de filtre Kalman, care modelează starea actuală și anterioară a sistemului robotic pe baza măsurătorilor și predicțiilor în timp real. În cazul în care în sistemul de senzori sunt introduse informații false, alterate, arhitectura poate fi îmbunătățită prin utilizarea unor tehnici combinate cu învățarea automată și rețelele neurale, creând un nivel mai ridicat de securitate și protecție a datelor. Fuziunea senzorilor sporește integritatea, fiabilitatea și robustețea sistemului în operațiunile controlate în timp real și oferă beneficii suplimentare împotriva atacurilor rețelelor de senzori care provin din domeniul analogic. Prin implementarea fuziunii senzorilor în sisteme, proiectanții și arhitecții pot reduce riscul de funcționare defectuoasă sau de acțiuni răuvoitoare care pot provoca vătămări corporale sau materiale.
O altă valență a fuziunii senzorilor este că datele pot fi utilizate în scopuri multiple pentru a îmbunătăți alte informații ale senzorilor sau datelor într-un format dat. Aceasta permite proiectantului să optimizeze traseele de date și funcționalitatea unui sistem de date, dar și să reutilizeze modulele de senzori într-o manieră care se potrivește cel mai bine cazului de utilizare și metodei de implementare. După cum se poate observa mai sus, datele brute pot fi scoase din sistem independent și corelate cu date comprimate și deja existente pentru a crea setul de date corect și/sau corectat la nivelul motorului de acțiune. Per total, datele optimizate vor avea un singur scop, crearea unui sistem mai rapid și mai inteligent care să permită robotului să se deplaseze mai conștient de sine și să ia decizii mai optimizate pe baza percepției și a informațiilor transmise de senzori. Analog Devices dispune de un set larg de module de sistem-, aplicație- și software-, în care căile individuale de optimizare pentru diferiți senzori sunt proiectate pentru cazuri de utilizare multifuncțională și aplicații finale.
În general, aceste tipuri de sisteme de fuziune extind funcționalitățile și capabilitățile în timp real ale sistemelor autonome în beneficiul unei configurări a producției cu un cost total de operare mai mic, printr-o optimizare mai bună, chiar și în cazurile în care fuziunea senzorilor va permite operarea de la distanță din centrele de control, pentru a conduce fabrica mai inteligentă către un nivel mai ridicat de sustenabilitate și prosperitate economică.
Un exemplu de integrare a unui robot mobil

Figura 3 (© ADI)
Adoptarea abordării de mai sus și implementarea acesteia pe un sistem robotic autonom real este mult facilitată printr-o abordare modulară a elementelor individuale din sistem și prin existența unor interfețe ROS pentru acestea. Astel, se permite modulelor să se interconecteze și să opereze cu ușurință, permițând în același timp proiectantului să profite de modulele software open-source și de modulele de aplicații, cum ar fi cele dezvoltate pentru SLAM (Simultaneous localization and mapping – localizare și cartografiere simultană) și de mediile de simulare, cum ar fi RViz (vizualizare ROS). Modulele tipice pentru navigație constau în: (1) o cameră frontală (3D-ToF), în care camera de imagistică de calitate 1MPix îmbunătățește cartografierea globală a adâncimii (percepția) la o ieșire de date de mare viteză pentru a permite obținerea de informații reale de adâncime în timp real. (2) module IMU care încorporează trasee de date de încredere pentru localizare și ghidare, în combinație cu (1), modulul de percepție, pentru a permite SLAM și navigație completă. Din punct de vedere al mișcării / deplasării (3), divizia “Trinamic” pentru controlul motoarelor de la Analog Devices dispune de un set mare de module individuale, facilitând acționarea și controlul fără probleme a sistemelor de motoare care suportă acționarea fiecărei roți. Mai ales, în mediile dificile și schimbătoare, utilizarea fuziunii senzorilor de viziune, localizare, poziție și deplasare a motorului, permite acum SLAM, chiar și în lipsa unor seturi de date de la senzorii individuali. (4) Combinația de putere acoperă atât DC/DC pentru POL local, cât și BMS care oferă suport pentru echilibrarea bateriei și monitorizarea celulelor, permițând transparența consumului și a stării de sănătate a bateriei. (5) Alți senzori, interfețe, accelerometre, transmițătoare wireless, conectivitate Ethernet sunt, de asemenea, implementate în platformă, acestea fiind submodule de sistem final sau specializate putând fi adăugate ca funcții suplimentare (noduri) la platforma globală, acolo unde este necesar.
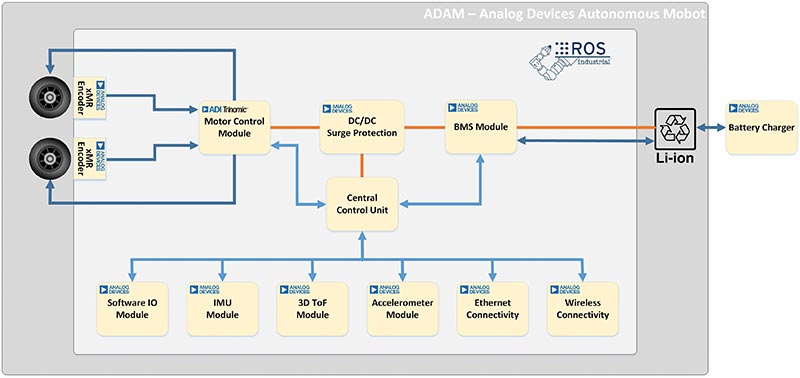
Figura 4 (© ADI)
Robotul autonom ADAM (Analog Devices Autonomous Mobot) de la Analog Devices și arhitectura modulară de nivel înalt a acestuia sunt prezentate în figurile 3 și 4. Toate modulele sunt conectate în timp real, suportând senzori și module pentru a permite caracteristica de navigare autonomă. Interfața ROS a fost utilizată pentru a facilita configurarea și scalabilitatea, susținând tema generală de proiectare modulară, după cum s-a menționat deja.
Tehnologii de tranziție de la implementarea bazată pe siliciu la implementarea modulară
În cadrul acestui articol s-a discutat despre modul în care se poate îmbunătăți și aprofunda implementarea roboticii autonome și perfecționate. Din punct de vedere academic, va fi întotdeauna posibil să se utilizeze și să se implementeze sisteme pentru obținerea unei performanțe optime, însă, într-o soluție completă și optimizată de producție, costul total al implementării și funcționalitatea contează într-o măsură pe care numai utilizatorul final și controlorul o are în vedere. Datorită acestei paradigme, Analog Devices și-a extins atenția asupra soluțiilor sale, reunind lumea academică, inovatorii, partenerii și clienții, împreună cu tehnologia de bază și modulele Analog Devices într-un centru de inovare creativă din Irlanda, Limerick. Acest centru, denumit Catalyst, formează un nou standard pentru co-crearea și dezvoltarea de proiecte de sisteme avansate, nu numai la nivel de componente și sisteme standard, ci și învățând din cerințele ecosistemului și aducând proiectele de sistem și modulare într-o nouă eră de integrare. Centrul de proiectare, Catalyst, va aborda noi standarde pentru modul în care Analog Devices permite realizarea de proiecte care să susțină un progres mai mare în domeniul fuziunii senzorilor și al intercomunicațiilor într-un mod care să asigure facilități de producție și mai flexibile și durabile în viitor. Pentru mai multe informații despre felul în care Analog Devices face posibilă această nouă eră robotică, vă rugăm să vizitați analog.com/robotics.
Autor: Anders Frederiksen, Marketing Manager Robotics & Emerging Technologies
Vizitați https://ez.analog.com
![]()
Contact România:
Email: inforomania@arroweurope.com
Mobil: +40 731 016 104
Arrow Electronics | https://www.arrow.com
![]()