

 Acest lucru se întâmplă deoarece, cu cât durata de viață a bateriei este mai mare pentru o aplicație finală, cu atât mai mic trebuie să fie consumul mediu de putere. Pentru a satisface cât mai bine cerințele de putere impuse de astfel de aplicații, permițând în același timp proiecte fiabile și cu durată lungă de viață, proiectanții ar trebui, mai întâi, să se gândească la microcontrolere mici și eficiente din punct de vedere energetic, dotate cu caracteristici și funcționalități inteligente și sofisticate. Astfel de microcontrolere sunt capabile să gestioneze majoritatea sarcinilor cerute de aplicație, reducând nevoia de componente pasive externe în proiectarea unui nod de senzori, aducând în același timp un consum redus de putere și funcții încorporate pentru un plus de flexibilitate și simplitate.
Acest lucru se întâmplă deoarece, cu cât durata de viață a bateriei este mai mare pentru o aplicație finală, cu atât mai mic trebuie să fie consumul mediu de putere. Pentru a satisface cât mai bine cerințele de putere impuse de astfel de aplicații, permițând în același timp proiecte fiabile și cu durată lungă de viață, proiectanții ar trebui, mai întâi, să se gândească la microcontrolere mici și eficiente din punct de vedere energetic, dotate cu caracteristici și funcționalități inteligente și sofisticate. Astfel de microcontrolere sunt capabile să gestioneze majoritatea sarcinilor cerute de aplicație, reducând nevoia de componente pasive externe în proiectarea unui nod de senzori, aducând în același timp un consum redus de putere și funcții încorporate pentru un plus de flexibilitate și simplitate.
De exemplu, atunci când se proiectează noduri de senzori alimentate cu baterii destinate unei aplicații precum un sistem de securitate a locuinței – un detector de mișcare PIR (Passive InfraRed) este, adesea, plasat în interiorul și în exteriorul reședinței. Un senzor PIR detectează schimbările în cantitatea de radiații infraroșii “văzute” de elementele senzorului, care variază în funcție de temperatura și de caracteristicile suprafeței obiectului din fața senzorului. Atunci când o persoană trece prin fața senzorului, acesta detectează schimbarea de la temperatura ambientală la temperatura corpului și invers. Senzorul convertește modificarea rezultată a radiației infraroșii primite într-o modificare a tensiunii de ieșire (VPIR(t)). Alte obiecte din decor, cu aceeași temperatură, dar cu caracteristici de suprafață diferite, vor face ca senzorul să detecteze un model de emisie diferit, după cum se vede în figura 1.
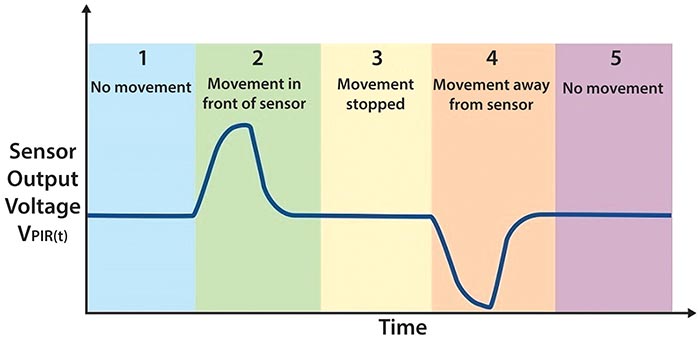
Figura 1: Principiul de detectare a mișcării de către un senzor PIR. (© Microchip Technology)
Nivelurile semnalului de ieșire de la un senzor PIR sunt, de obicei, foarte scăzute și mai mici de 1 mV. Pentru a detecta mișcarea și a evita detecțiile false, semnalul analogic trebuie amplificat înainte de a fi eșantionat de un convertor analog-digital (ADC). În soluțiile PIR tipice, acest lucru se realizează prin utilizarea mai multor etaje cu amplificatoare operaționale (Op Amp) cu câștig ridicat, care, la rândul lor, sporesc complexitatea proiectului, numărul de componente, consumul de energie, costurile și multe altele. Haideți să vedem cum poate un microcontroler de mici dimensiuni și eficient din punct de vedere energetic să reducă aceste efecte.
Complexitatea proiectării
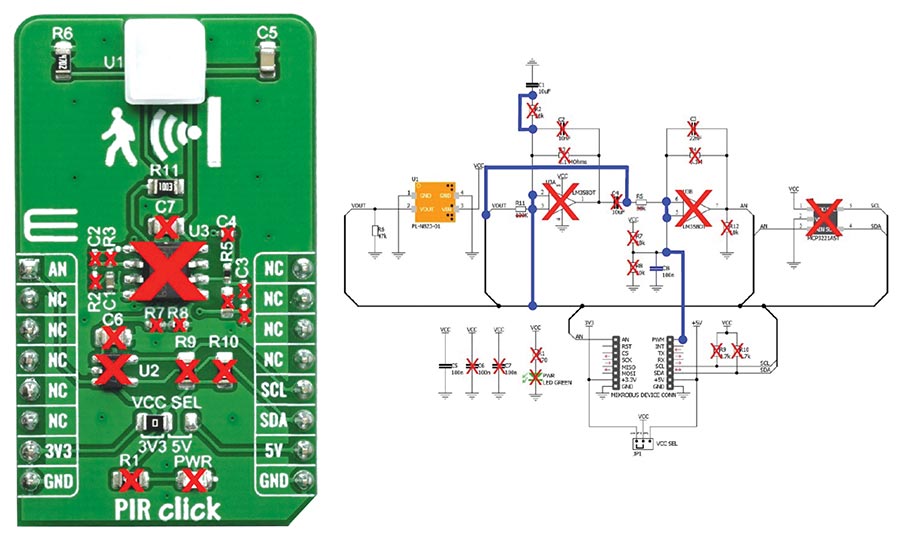
Figura 2: Exemplu de modificări aduse plăcii PIR click și schema electronică. (© Microchip Technology)
Bazând proiectarea unui nod de senzori PIR pe un microcontroler de mici dimensiuni cu un set de caracteristici adecvate, cum ar fi un ADC diferențial pe 12-biți cu amplificator cu câștig programabil (PGA), veți reduce nevoia de componente externe, spațiul pe placă și costul listei de materiale (BoM). Luați în considerare senzorul PIR Click de la MickroE. Aceasta este o placă de circuit imprimat (PCB) cu toate componentele pasive necesare pentru a realiza un nod de senzor PIR funcțional. Placa Click se bazează pe o soluție Op Amp, inclusiv ADC-uri, rezistoare și capacitoare și este făcută să funcționeze imediat pentru a facilita prototiparea și evaluarea. O configurație tipică pentru o prototipare ușoară poate fi utilizarea plăcii PIR Click în combinație cu Microchip Curiosity Nano Base for Click boards™ și un kit de evaluare Curiosity Nano. O soluție de nod de senzori PIR poate beneficia de utilizarea unui microcontroler precum ATtiny1627 de la Microchip Technology, care dispune de un ADC diferențial pe 12-biți și de un PGA. Numărul de componente externe poate fi redus semnificativ prin eliminarea necesității unui amplificator operațional extern pentru amplificarea semnalului. Acest lucru, împreună un ADC extern, permit eliminarea mai multor alte componente pasive, cum ar fi rezistoarele și capacitoarele.
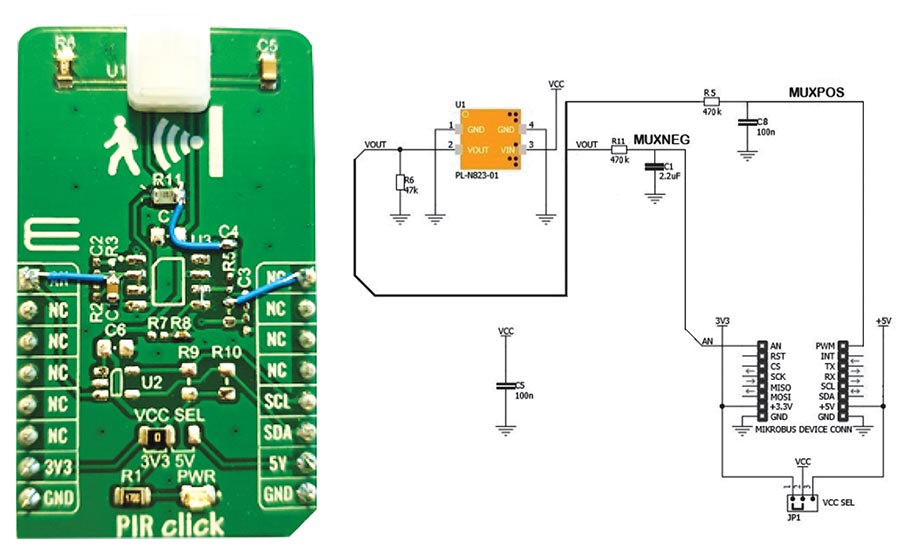
Figura 3: Placa PIR click modificată și schema electronică. (© Microchip Technology)
Așadar, prin utilizarea unui astfel de microcontroler, configurația PCB a plăcii PIR click poate fi redusă semnificativ. Figura 2 ilustrează modul în care pot fi eliminate componentele (X) și cum pot fi realizate noile conexiuni (linii albastre).
Notă: În acest exemplu, placa PIR click este utilizată ca punct de plecare pentru modificări, deoarece este mai convenabil decât să se proiecteze un nou PCB și să se achiziționeze componentele necesare. Această soluție modificată nu intră în concurență cu rolul plăcilor Click.
Cu aceste modificări, profitând de ADC-ul diferențial pe 12-biți încorporat și de PGA, figura 3 ilustrează, de asemenea, cât de puține componente externe sunt necesare atunci când se selectează microcontrolerul potrivit.
Cu mai puține componente externe, proiectarea hardware (precum și a PCB-ului) va fi mai curată și mai compactă, deoarece există mai puține considerente hardware care trebuie luate în considerare atunci când vine vorba de plasarea componentelor externe. În plus, software-ul și firmware-ul pot fi mai compacte și mai eficiente, deoarece mai multe dintre sarcini sunt gestionate în interiorul microcontrolerului. Timing-ul și sincronizarea vor fi, de asemenea, mai ușor de gestionat.
Atunci când o mare parte din complexitatea proiectării nodului de senzori este mutată din hardware în microcontroler și în unitatea centrală de procesare (CPU) și gestionată în firmware, modificarea și adăugarea de funcționalități în timpul procesului de dezvoltare devine mai flexibilă – fără a pierde timp cu reproiectarea layout-ului plăcii, ceea ce economisește timp și costuri pentru proiectanți. Este mai convenabil, de asemenea, să se optimizeze codul pentru alți factori, cum ar fi consumul de putere. Simpla modificare a setărilor parametrilor va permite proiectanților să aducă modificări la codul aplicației, fie pentru a adăuga funcționalitate, fie pentru a optimiza codul pentru un consum redus de energie sau pentru sensibilitatea legată de condițiile de mediu, cum ar fi variațiile de temperatură ambientală, deoarece senzorii pot întâmpina dificultăți în detectarea unei ființe umane, atunci când temperatura ambientală depășește 30°C. Un alt exemplu de funcționalitate sporită ar putea fi adăugarea de învățare automată în scopul recunoașterii modelelor legate de mișcare și instruirea sistemului pentru a învăța să facă distincția între ceea ce este doar zgomot sau o persoană reală în mișcare și un animal etc.
Pentru aplicațiile de detecție a mișcării care utilizează senzori PIR, microcontrolerele, precum ATtiny1627, complexitatea hardware se mută la firmware și software, deoarece o mare parte din funcționalitatea necesară este încorporată în microcontroler. Astfel, se reduce complexitatea, în timp ce se câștigă flexibilitate.
Eficiența energetică
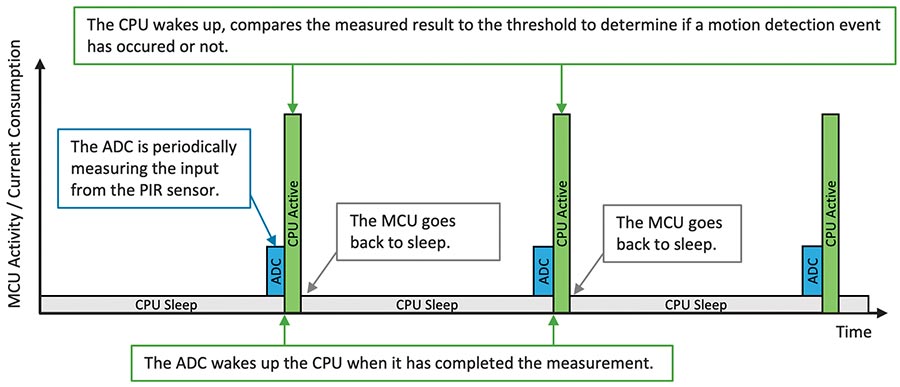
Figura 4: Diagrama de sincronizare a firmware-ului. (© Microchip Technology)
Consumul de energie al nodurilor de senzori wireless este esențial. Deoarece cu cât durata de viață a bateriei este mai mare, cu atât mai mare este durata de viață a nodului senzorial și, prin urmare, durata de viață a întregului sistem de rețea de senzori. Acest lucru este valabil pentru toate sistemele de senzori wireless. Dacă sunt instalate zeci, sute sau mii de senzori pentru diverse tipuri de monitorizare, nodul va fi considerat mort sau disfuncțional dacă se oprește. Pentru sistemele mai mari de senzori, schimbarea unei baterii sau a nodului însuși înseamnă costuri suplimentare pentru utilizatorul final, pe lângă faptul că sistemul este oprit sau nu este pe deplin funcțional când nodul este oprit și, prin urmare, pot apărea incidente nedorite fără a se oferi o notificare. Așadar, cu cât bateria poate dura mai mult, cu atât mai bine.
Datorită modurilor de veghe ale microcontrolerului și a timpului rapid de trezire, fiecare dintre nodurile de senzori poate utiliza o cantitate minimă de energie. Nodul poate să “doarmă”, apoi să se trezească rapid atunci când este detectată o mișcare datorată unei schimbări de temperatură în domeniul de acoperire al senzorului, apoi să proceseze semnalul și ulterior să se întoarcă în stare de veghe, ceea ce face ca fiecare nod alimentat cu baterii să funcționeze mai mult timp – fără a fi nevoie să se schimbe o baterie. Vedeți figura 4 pentru a înțelege modul în care funcționează unitatea centrală de procesare, atunci când se rofit de modurile de veghe și de timpul de trezire rapidă. Consumul de energie este dependent de aplicație și va fluctua în funcție de configurația senzorului PIR, de timpul de achizitie a eșantioanelor și de parametrii de filtrare, care vor afecta, de asemenea, domeniul de detecție și/sau sensibilitatea. Luați în considerare ajustarea acestor parametri pentru a reduce și mai mult consumul de energie în momentele în care cerințele aplicației sunt mai mici.
Dispunând de caracteristici și funcționalități încorporate inteligente și sofisticate, care îmbunătățesc consumul de curent și eficiența energetică, microcontrolerele de mici dimensiuni, dar puternice, precum ATtiny1627, vor crește durata de viață a aplicațiilor conectate și alimentate de la baterii, reducând în același timp complexitatea proiectării, costurile totale ale sistemului și timpul de lansare pe piață Pentru a afla mai multe despre proiectarea unei aplicații de detectare a mișcării cu senzor PIR, eficiente din punct de vedere al consumului de putere și al costurilor, accesați pagina: www.microchip.com.
Autor:
Stian Sogstad, MCU8
Microchip Technology | https://www.microchip.com
![]()