

Acest articol evidențiază arhitectura sistemelor de detecție avansate din cadrul vehiculelor autonome și protocoalele și interfețele utilizate pentru a transporta date în subsistemele unui vehicul. Investigăm sursele de interferență și propunem tehnici pentru a atenua impactul pe care astfel de semnale nedorite l-ar putea avea asupra funcționării sigure a vehiculului.
Pe măsură ce industria auto dezvoltă conceptele pentru vehiculele semi și complet autonome, diversitatea sistemelor complexe și sensibile bazate pe electronică evoluează semnificativ. Pentru societate, automatizarea promite drumuri mai sigure, cu mai puține accidente, precum și o descongestionare a traficului în mod proactiv. Pentru a funcționa în mod fiabil și sigur, sistemele autonome necesită mai mulți senzori și subsisteme interconectate de înaltă performanță.
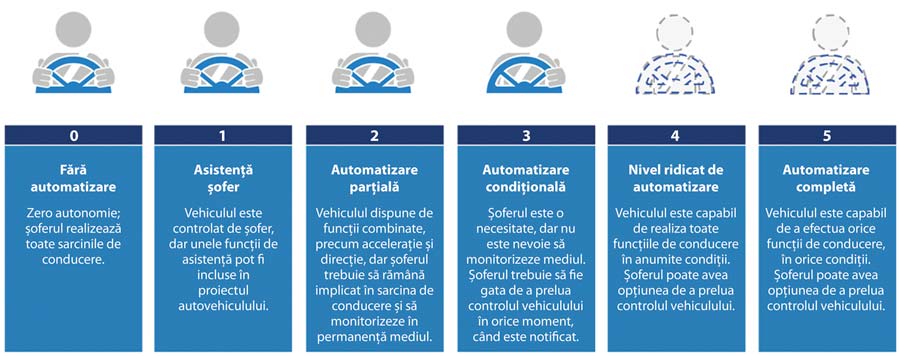
Figura 1: Niveluri de automatizare a vehiculelor, așa cum sunt definite de Societatea Inginerilor Auto. (Sursa: SAE – Society of Automotive Engineers)
Mediul exigent și zgomotos din punct de vedere electric al unui vehicul hibrid sau electric complică, în continuare, potențialele provocări tehnice. Posibilitatea ca sistemele să perturbe funcționarea altor sisteme vitale, din surse interne precum EMI, stări tranzitorii, și influențe externe, cum ar fi infrastructura C2X pe șosea, este semnificativă.
Sistemele avansate de asistență a șoferului (ADAS – Advanced Driver Assistance Systems) reprezintă fundația autonomiei unui vehicul, lucrând împreună cu aplicații mai sofisticate și complexe atunci când sunt complet autonome. De asemenea, ADAS informează direct șoferul despre situații iminente, atunci când operează în orice mod semi-autonom (nivel 1 – nivel 3). Diferitele niveluri de automatizare ale unui vehicul sunt ilustrate în Figura 1.
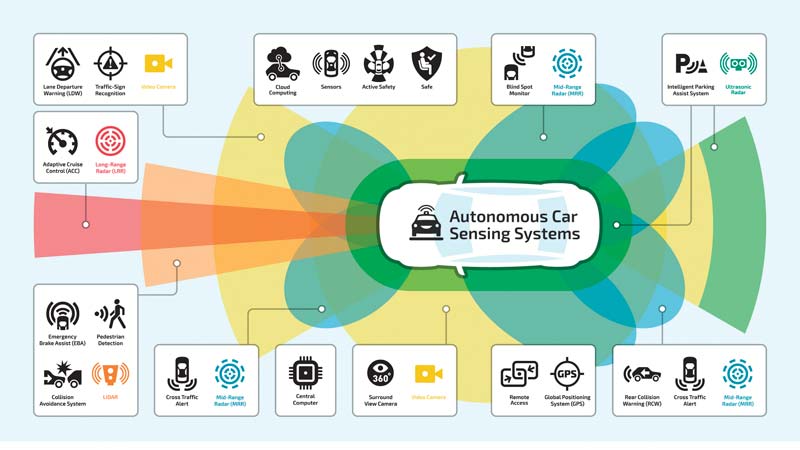
Figura 2: Sisteme de detecție avansate ale vehiculele autonome. (Sursa Littelfuse)
Arhitectura sistemului unui vehicul autonom
Într-un vehicul autonom, ochii și urechile șoferului electronic sunt o multitudine de senzori diferiți – (vezi Figura 2). Toți sunt conectați la un sistem central computerizat responsabil pentru navigarea în siguranță a vehiculului în orice situație de conducere.
Senzorii includ radar RF cu rază lungă de acțiune pentru a detecta vehicule, pietoni și alte obiecte aflate în mișcare la o distanță mare în fața vehiculului și un subsistem video cu o rețea neuronală convoluțională de învățare pentru a detecta pietonii, semnele rutiere și separarea benzilor. Alți senzori includ un sistem de camere video de 360 de grade pentru monitorizarea situației rutiere cu privire la obiectele în mișcare sau staționare din jur. Pentru a cunoaște cu exactitate poziția vehiculului în orice moment, o navigație GNSS performantă oferă o precizie pozițională la nivel de centimetru și capabilități de orientare, atunci când vehiculul intră în mediul urban, înconjurat de clădiri înalte tipice orașelor, sau atunci când conduce prin tuneluri.
Protocoale de rețea CAN și Ethernet, fiabile și robuste, interconectează subsisteme cu un nivel de latență acceptabil (<5 ms). Din ce în ce mai mult, tendința pentru subsistemele video și radar este ca acestea să includă de asemenea, motoare de inferență cu învățare automată pentru a detecta și clasifica obiecte la punctul de detectare, mai degrabă decât să plaseze o sarcină de lucru suplimentară pe sistemul central. Această abordare reduce, de asemenea, latența în timp real, o considerație critică de proiectare pentru un vehicul care se deplasează la peste 30 m/s (70 mph/112 km/h). Latența are impact asupra deciziilor în timp util și interzice utilizarea conectivității cloud pentru orice sarcină de conducere în timp real. De exemplu, o rețea celulară 4G are o latență tipică “dus-întors” (round-trip) de 60 de milisecunde, timp în care automobilul va parcurge 1.8 metri în baza vitezei de mai sus. FlexRay și LIN sunt alte două protocoale de rețea auto, utilizate pe scară largă.
Pentru informațiile de pe panoul de bord și cerințele de transmisie video ale vehiculului, HD BaseT se dovedește a fi un protocol de rețea viabil. Combinând ce este mai bun dintre HDMI și Ethernet, HDBaseT utilizează un singur cablu pentru a comunica semnale audio, video, Ethernet, alimentare PoE (power-over-Ethernet) de 100 W, controale de sistem și USB. Optimizat pentru utilizare în diferite domenii, protocolul auto recomandă utilizarea unei singure perechi de fire neecranate pentru conectarea dispozitivelor până la 15m. Integrarea diferitelor elemente de transmisie într-un singur cablu reduce, de asemenea, greutatea considerabilă a cablului, munca de instalare și costul materialului.
Pentru ca un vehicul autonom să funcționeze în condiții de siguranță și fiabilitate, toate sistemele interconectate și interdependente trebuie să funcționeze continuu și fără probleme. Dacă un senzor începe să se defecteze sau circuitele subsistemului de monitorizare detectează performanță mediocră, trebuie să fie emisă o alertă imediată către computerul central pentru a declanșa o oprire sigură.
Provocări tehnice și modalități de a le reduce impactul
Senzorii electronici și subsistemele asociate utilizează componente analogice și digitale extrem de sofisticate pentru a funcționa. Astfel de dispozitive sunt susceptibile la perturbări cauzate de stări electrice tranzitorii, interferențe electromagnetice (EMI) și descărcări electrostatice (ESD). Tensiunile tranzitorii apar pe liniile de alimentare din cauza comutației rapide dV/dt și creează vârfuri de tensiune de câteva ori mai mari decât tensiunea nominală de alimentare. Motoarele electrice de mare putere și alte sarcini inductive pot provoca descărcări rapide tranzitorii de supratensiune în timpul funcționării. Ansamblul de antrenare de la un vehicul electric este, fără îndoială, o sursă de stări electrice tranzitorii. Totuși, motoarele mai mici utilizate pentru direcția electrică, confortul și comenzile caroseriei, precum și frânele de parcare electrice pot crea, de asemenea, tensiuni tranzitorii semnificative. Tensiunile tranzitorii pot intra într-un subsistem fie de-a lungul liniilor de alimentare comune, fie induse în cablurile adiacente, cum ar fi cele care conectează senzorii la subsisteme sau rețeaua de subsisteme la computerul central. Fără o protecție adecvată, semnalele tranzitorii pot determina resetarea microprocesoarelor, blocarea sau, în cazuri extreme, deteriorarea fizică a componentelor critice.
De asemenea, interferența electromagnetică poate provoca un comportament imprevizibil și neregulat al sistemului și poate proveni din diverse surse, inclusiv de la puncte de acces WiFi și telefoane inteligente.
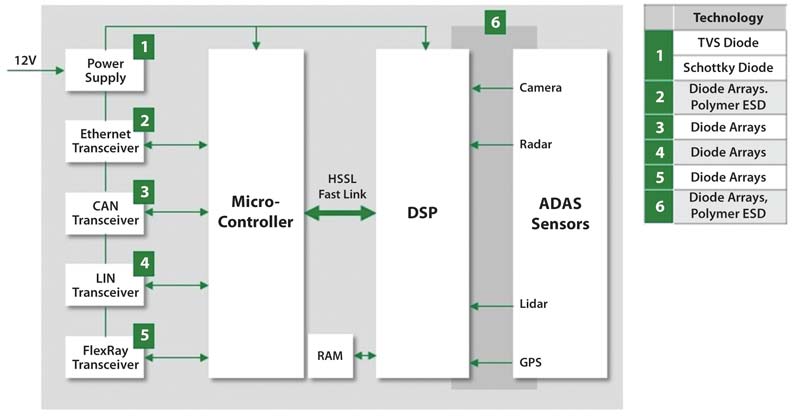
Figura 3: Subsistemul de comunicație și control ADAS și necesitatea dispozitivelor de protecție. (Sursa: Littelfuse)
Descărcarea electrostatică reprezintă o îngrijorare enormă pentru componentele electronice sensibile. Acestea au nevoie de o manipulare specială pe tot parcursul lanțului de aprovizionare și în timpul producției, dar au nevoie și de protecție în circuitul final. Precum semnalele electrice tranzitorii, descărcarea electrostatică determină creșteri masive de tensiune și poate rezulta din acumularea de energie generată de frecarea carosabilului cu anvelopele de cauciuc sau contactul uman cu țesăturile. Vehiculele care operează în regiuni cu umiditate scăzută sunt, de asemenea, susceptibile la descărcări electrostatice.
Protejarea unui subsistem de comunicație și control ADAS
Figura 3 evidențiază principalele blocuri funcționale ale unui subsistem de comunicație și control ADAS, inclusiv dispozitivele de protecție care ar trebui utilizate.
Fiecare legătură de comunicație (2, 3, 4 și 5) necesită protecție potrivită la stări tranzitorii și ESD pentru specificațiile electrice și vitezele de transfer de date ale fiecărui protocol. Cel mai rapid protocol este Ethernet, cu o viteză de transfer cuprinsă uzual între 100 Mbps și 10 Gbps. Pentru interfețele Ethernet diferențiale de mare viteză, metodele de protecție recomandate împotriva ESD și supratensiunilor tranzitorii includ utilizarea unui supresor ESD polimeric, cum ar fi seria Littelfuse AXGD Xtreme-Guard, certificată AEC-Q200.
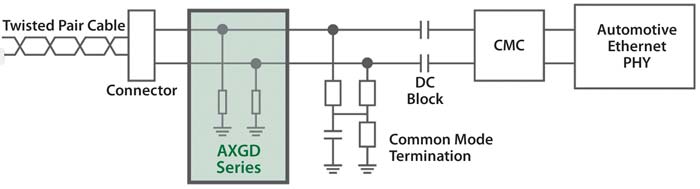
Figura 4: Diagramă bloc ce ilustrează un dispozitiv de protecție ESD din polimer pentru un transceiver Ethernet. (Sursa: Littelfuse)
Figura 4 ilustrează locul în care un dispozitiv din seria AXGD este amplasat în conexiunea Ethernet, de la o conectare diferențială cu cablu torsadat la Ethernet PHY. Cu un timp de răspuns rapid și capabil să absoarbă semnale electrice tranzitorii de până la 50 A și până la 30 kV, seria AXGD protejează o pereche diferențială într-o singură capsulă. De asemenea, cu o valoare a capacității extrem de redusă, protecția ESD nu afectează vitezele de transfer de date Ethernet de până la 1 Gbps.
Pentru interfața dispozitivelor de comunicație CAN, sunt recomandate matrici de diode pentru protecția împotriva semnalelor tranzitorii rapide și ESD. Figura 5 ilustrează utilizarea unei matrice de diode, seria Littelfuse AQ24CANA.
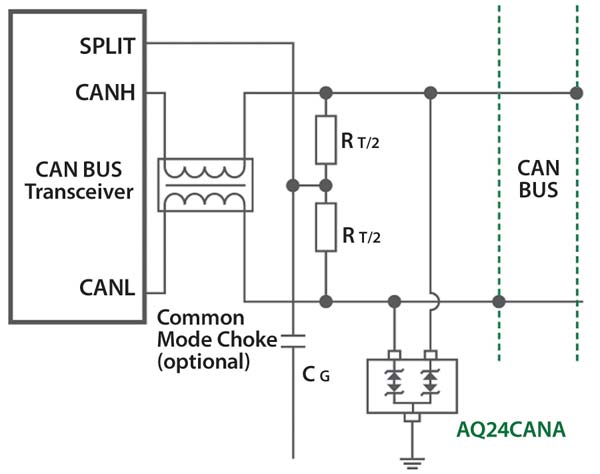
Figura 5: Protecția ESD a unui emițător-receptor de magistrală CAN utilizând o matrice de diode Littelfuse AQ3400 certificată AEC-Q101. (Sursa: Littelfuse)
Un alt exemplu de diodă de suprimare a tensiunii tranzitorii (TVS) bazată pe diodă Zener este TVS Littelfuse SZ1SMB seria 600W. Utilizată în mod ideal în surse de alimentare așa cum este prezentat și in Figura 3, seria SZ1SMB are capabilități excelente de limitare a semnalului, un timp de răspuns rapid și poate absorbi tensiuni tranzitorii mari.
Standarde pentru electronica auto
La selectarea componentelor de protecție împotriva stărilor tranzitorii și ESD pentru sistemele electronice auto, se recomandă o consultare a standardelor internaționale aplicabile. Trei dintre cele mai importante standarde ISO sunt: ISO7637-2, ISO16750-2 și ISO10605: 2008. În plus, față de aceste standarde, Consiliul pentru Electronică Auto (AEC – Automotive Electronics Council) a conceput o serie de standarde de calitate, care definesc criteriile de solicitare mecanică, electrică și de mediu pentru componentele utilizate în sistemele electronice auto. Standardele relevante includ AEC-Q101 pentru componente discrete precum semiconductori și diode și AEC-Q200 pentru componente pasive precum condensatori, rezistențe și inductori.
Concluzie
Protejarea sistemelor electronice ale vehiculelor autonome împotriva stărilor tranzitorii, EMI și ESD este esențială pentru a asigura o funcționare continuă, fiabilă și fără defecte. Vehiculele autonome promit să reducă semnificativ congestionarea traficului și să facă drumurile noastre mai sigure pentru șoferi, pasageri și pietoni. Cu ajutorul componentelor de protecție împotriva supratensiunii și energiei statice, proiectanții vor avea încrederea că sistemele lor vor fi suficient de robuste pentru a rezista oricăror perturbări electrice nedorite.
![]()
Autor:
Mark Patrick
![]()
Mouser Electronics
Authorised Distributor
https://ro.mouser.com