

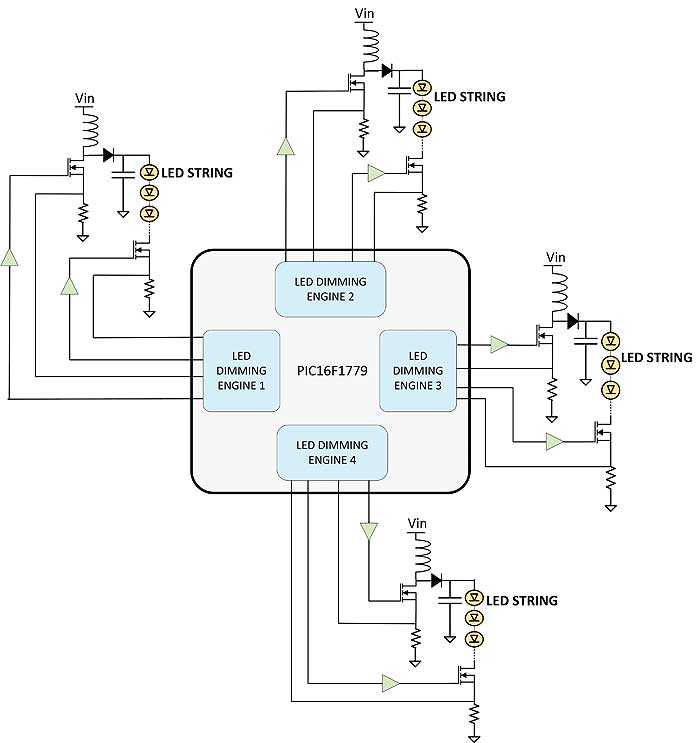
Figura 1: Schema a 4 șiruri de LED-uri controlate cu un microcontroler Microchip PIC16F1779 pe 8-biți
Suplimentar, integrarea perifericelor independente de nucleu oferă o flexibilitate semnificativă față de implementarea pur analogică sau ASIC, permițând inovații ce trec de capabilitățile produselor de iluminare, conducând la posibilități de diferențiere a produselor. Caracteristici precum mentenanță și predictibilitate a problemelor de funcționare, monitorizare a energiei, control culoare și temperatură, precum și control și comunicații de la distanță, sunt numai câteva dintre capabilitățile avansate ce pot face ca soluțiile de iluminare inteligente să fie chiar și mai atractive.
Cu toate că driverele LED oferă numeroase avantaje față de soluțiile de iluminare anterioare, există totuși provocări în ceea ce privește implementarea lor. Dar nu vă temeți, la sfârșitul acestui articol, veți învăța cum poate fi utilizat un microcontroler (MCU) pe 8 biți pentru a simplifica provocările legate de proiectare și pentru a crea soluții de comandă a LED-urilor în mod de comutație, de înaltă performanță, cu capabilități dincolo de soluțiile tradiționale.
Un microcontroler pe 8 biți poate fi utilizat pentru a controla independent până la patru canale LED, ceea ce este ceva ce majoritatea soluțiilor de controlere LED la raft nu pot oferi. În figura 1 se arată cum motoarele de reglare a luminozității LED-urilor pot fi create din perifericele disponibile la nivelul microcontrolerului. Fiecare dintre aceste motoare are un canal independent închis, care poate controla convertorul de alimentare în mod de comutație cu o intervenție minimă sau chiar fără intervenția unității centrale de procesare (CPU). Aceasta conferă unității centrale libertatea de a îndeplini alte sarcini importante, precum funcții de supervizare, comunicații sau inteligență adăugată sistemului.
Motorul de reglare a luminozității LED
În figura 2, driverul LED, care este bazat pe convertorul ridicător de tensiune de mod curent, este controlat de motorul de reglare a luminozității LED. Motorul este în principal compus din periferice independente de nucleu (CIP) precum generator de ieșire complementar (COG), modulator de semnal digital (DSM), comparator, generator programabil de rampă (PRG), amplificator operațional (OPA) și modulator de lățime puls 3 (PWM3).
Combinând aceste CIP-uri cu alte periferice de pe cip, precum stabilizator de tensiune fix (FVR), convertoare digital-analogice (DAC) și CCP (Capture/ Compare/PWM), se obține întregul motor de reglare. COG furnizează pulsul de comutație de înaltă frecvență pentru MOSFET-ul Q1 ce permite transferul de energie și curent de alimentare către șirul de LED-uri. Perioada de comutație a ieșirii COG este stabilită de CCP și factorul de umplere, care menține curentul prin LED constant și este dictat de către ieșirea comparatorului. Acesta produce un puls de ieșire ori de câte ori tensiunea prin Rsense1 depășește ieșirea modulului PRG. PRG, a cărui intrare este derivată din ieșirea OPA în circuitul de reacție, este configurat ca și compensator de pantă pentru a contrabalansa efectul oscilațiilor subarmonice inerente atunci când factorul de umplere este mai mare de 50%.
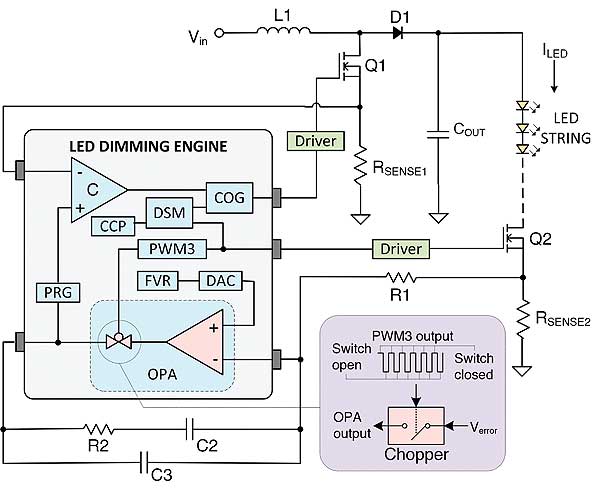
Figura 2: Motor de reglare a luminozității LED-ului
Modulul OPA este implementat ca amplificator de eroare (EA) cu o configurație de compensator de tip II. FVR este utilizat ca intrare a convertorului DAC pentru a furniza o tensiune de referință pe intrarea neinversoare a OPA, pe baza specificațiilor de curent constant pentru LED.
Cu scopul de a realiza diminuarea intensității luminoase, PWM3 este utilizat ca modulator a ieșirii CCP, în vreme ce comandă MOSFET-ul Q2 pentru un ciclu rapid al LED-ului ON și OFF. Modulația este posibilă prin modulul DSM, iar semnalul de ieșire modulat este trimis către COG. PWM3 livrează pulsuri cu factor de umplere variabil, care controlează curentul mediu al driverului, iar ca efect, controlează strălucirea LED-urilor.
Motorul de reglare al luminozității LED-ului poate nu numai să realizeze ceea ce face un driver LED tipic, ci poate îndeplini și funcții ce rezolvă probleme tipice ale driverelor LED. În cele ce urmează vor fi discutate aceste probleme și modul în care motorul de reglare a luminozității LED-ului poate fi utilizat pentru a le evita.
Pâlpâirea
Pâlpâirea este una dintre provocările căreia trebuie să îi facă față driverele LED uzuale în mod de comutație. În vreme ce pâlpâirea poate fi un efect distractiv atunci când este intenționat, atunci când se produce nedorit, fenomenul poate strica întreg proiectul de iluminare dorit de utilizator. Pentru a evita pâlpâirea și pentru a oferi o experiență de reglare fină a luminozității, driverul ar trebui să reducă luminozitatea de la 100% și până la cel mai de jos nivel de lumină cu o trecere fluidă continuă. Deoarece LED-ul răspunde instantaneu la schimbări de curent și nu are efect de atenuare, driverul trebuie să aibă suficienți pași de diminuare astfel încât ochiul să nu distingă schimbările. Pentru a răspunde acestei cerințe, motorul de reglare a strălucirii LED-ului are nevoie de PWM3 pentru controlul diminuării strălucirii. PWM3 este un PWM cu rezoluție de 16 biți, care are 65536 trepte de la factorul de umplere de 100% la 0%, asigurând astfel o tranziție lină.
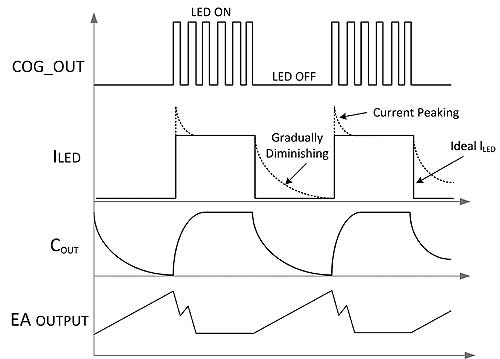
Figura 3: Formă de undă pentru diminuarea strălucirii LED-ului
Schimbarea temperaturii de culoare a LED-ului
Driverul LED poate de asemenea conduce la schimbarea temperaturii de culoare a LED-ului. O astfel de schimbare de culoare poate fi observată de consumator și poate diminua pretențiile legate de înalta calitate a iluminării. Figura 3 prezintă o formă de undă PWM tipică pentru diminuarea strălucirii LED-ului. Atunci când LED-ul este oprit, curentul prin LED scade gradual datorită descărcării lente a condensatorului de ieșire. Acest eveniment poate conduce la o variație a temperaturii de culoare și o mai mare disipare a energiei LED-ului.
Descărcarea lentă a condensatorului de ieșire poate fi eliminată prin utilizarea unui comutator de sarcină. De exemplu, în figura 2, circuitul utilizează Q2 drept comutator de sarcină, iar motorul de reglare a strălucirii LED oprește sincronizat ieșirea PWM a COG și Q2 cu scopul de tăia calea de scădere a curentului și de a permite LED-ului să se oprească repede.
Vârfuri de curent
Atunci când pentru comanda LED-ului este utilizat un convertor de alimentare în mod de comutație, circuitul de reacție este implicat pentru a stabiliza curentul prin LED. Cu toate acestea, pe durata reglării, circuitul de reacție poate crea vârfuri de curent (vedeți figura 3), atunci când operația nu este gestionată corespunzător. Privind înapoi la figura 2, când LED-ul este în stare ON, prin acesta circulă un curent, iar tensiunea pe RSENSE2 este trimisă către EA. Atunci când LED-ul se stinge, prin LED nu circulă curent, iar tensiunea pe RSENSE2 devine nulă. Pe durata timpului de oprire, ieșirea EA crește la maximul său și supraîncarcă rețeaua de compensație a EA. Atunci când PWM-ul modulat trece în stare ON din nou, este nevoie de câteva cicluri pentru revenire, timp în care prin LED trece un curent de vârf ridicat. Acest scenariu cu vârfuri de curent scurtează durata de viață a LED-urilor.
Pentru a evita problema, motorul de reglare a strălucirii LED-ului permite utilizarea PWM3 ca sursă de suprascriere pentru OPA. Atunci când PWM3 este în nivel inferior, ieșirea EA este în a treia stare, ceea ce deconectează complet rețeaua de compensare de la bucla de reacție, păstrând ultimul punct de reacție stabil ca încărcare stocată în condensatorul de compensare. Atunci când PWM3 este la nivel superior și LED-ul se aprinde din nou, rețeaua de compensare se reconectează și tensiunea de ieșire a EA “sare” imediat la starea stabilă anterioară (dinainte de nivelul inferior al PWM3), readucând aproape instantaneu curentul prin LED la valoarea stabilită.
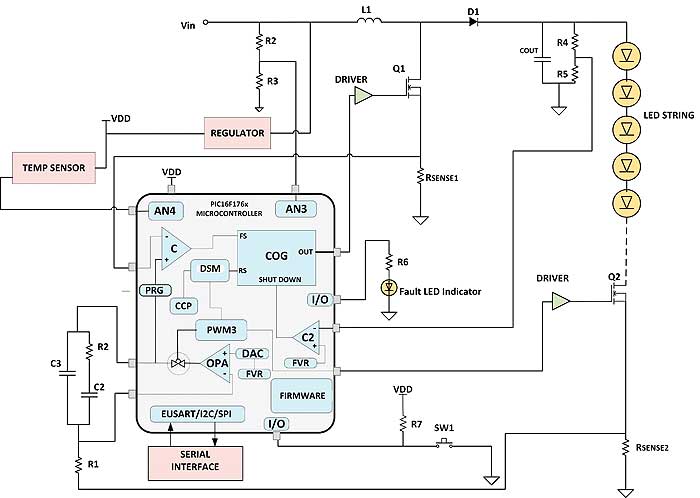
Figura 4: Soluție de driver LED pentru reglarea strălucirii în mod de comutație
Soluție completă
După cum s-a menționat mai devreme, un motor de reglare a strălucirii LED-ului poate opera cu intervenția minimă sau chiar fără intervenția CPU. Prin urmare, fiind descărcat datorită CIP-urilor, de sarcina de a controla driverul LED, CPU are o lățime de bandă semnificativă pentru a executa alte sarcini importante. Prin procesarea tensiunilor detectate de intrare și de ieșire pot fi executate funcții de protecție, precum blocare la subtensiune (UVLO), blocare la supratensiune (OVLO) și protecție la supratensiune de ieșire (OOVP). Acestea asigură faptul că driverul LED operează în cadrul specificațiilor dorite, iar LED-ul este protejat de condiții de ieșire și de intrare anormale. CPU poate de asemenea procesa datele termice de la un senzor pentru a implementa un management termic al LED-ului.
Mai mult, atunci când se stabilește nivelul de diminuare a strălucirii LED-ului, CPU poate procesa declanșatoare, de la un simplu switch extern, până la o comandă prin comunicație serială. De asemenea, parametrii driverului LED pot fi trimiși către dispozitive externe prin comunicație serială, în scop de monitorizare sau testare. Pe lângă funcțiile menționate mai sus, proiectanții pot dispune de adăugarea de mai multă inteligență în aplicația lor LED, incluzând aici comunicații, precum DALI sau DMX, și particularizarea controlului. Figura 4 prezintă un exemplu de soluție completă de driver LED cu reglare în mod de comutație, utilizând motorul de reglare a strălucirii LED.
Concluzie
Pentru a crea un driver LED eficient, poate fi utilizat un motor de reglare a strălucirii LED. Eficiența vine din faptul că poate comanda mai multe șiruri de LED-uri, oferind o sursă de energie eficientă, asigurând performanțe optime pentru LED, menținând o durată mare de viață a acestuia și adăugând inteligență sistemului.
Autor: Mark Pallones, Inginer principal de aplicații
Microchip Technology | www.microchip.com
![]()