

Motoarele electrice privite global consumă o parte substanţială a energiei electrice mondiale. Conform cercetărilor realizate de IHS Technology, 96% din costurile pe durata de viaţă a unui motor sunt reprezentate de costuri pe electricitate. Stabilizatoarele au impus standarde energetice mai stringente, iar producătorii examinează contribuţia lor la costul total de proprietate (TCO) al echipamentului. Acest lucru a condus la proiecte mai complexe pentru controlul motoarelor ce utilizează bucle de reacţie cu şi fără senzori, precum şi algoritmi avansaţi pentru un control mai precis şi un randament mai ridicat la nivelul motorului.
de Jason Chiang, Sr. Marketing Manager, Industrial şi
Ted Marena, Director, FPGA/SoC Marketing, Microsemi (www.microsemi.com)
Proiectanţii de motoare trebuie de asemenea să suporte schimbătoarele tehnologii şi standarde industriale de control motoare, oferind în acelaşi timp funcţii de sistem importante care să asigure siguranţa utilizatorilor, scalabilitatea şi siguranţa în funcţionare. Respectarea celor două scopuri îngemănate de eficienţă energetică şi capabilităţi îmbunătăţite la nivel de sistem necesită putere de procesare adecvată pentru operarea algoritmilor, dar şi arhitecturi de sistem flexibile şi scalabile. FPGA-urile tip sistem pe cip (SoC) bazate pe memorie flash, consum energetic redus, sigure, nevolatile răspund ambelor provocări prin furnizarea puterii necesare cu o combinaţie de securitate şi siguranţă în funcţionare, precum şi comunicaţii protejate pentru aplicaţii de Internetul Lucrurilor (IoT); este oferită abilitatea de scalare rapidă şi simplă de la proiecte de control motoare cu amprentă redusă la proiecte particularizate bogate în funcţii pentru o varietate de aplicaţii multi-axă sau viteze mari de rotaţie.
Provocări
În vreme ce proiectele tradiţionale utilizează un control scalar simplu, motoarele de înaltă eficienţă utilizează un control orientat în câmp (FOC) pe toate domeniile de cuplu şi viteză pentru a îmbunătăţi semnificativ randamentul. Deoarece este controlat în curent, FOC optimizează de asemenea circuitele inversoare de putere, iar amprenta motorului depinde de cerinţele aplicaţiei. Ea utilizează bucle de reacţie cu sau fără senzori, şi algoritmi complecși pentru stabilizarea comportamentului motorului din punct de vedere al vitezei, poziţiei sau unghiului, cuplului, curentului şi fluxului.
În vreme ce microcontrolerele (MCU) şi DSP-urile erau utilizate tradiţional pentru procesarea algoritmilor în proiecte cu una sau două axe, capabilitatea lor de procesare nu a putut ţine pasul cu cerinţele de performanţă pentru aplicaţii multi-axă sau de mare viteză de rotaţie. Pe lângă acestea, eficienţa controlului motorului este rareori singura grijă, în special în cadrul aşa numitelor fabrici conectate, unde astăzi mediul de Internetul Lucrurilor (IoT) impune cerinţe critice pentru comunicaţie sigură – ceva pentru care arhitecturile FPGA bazate pe flash sunt ideale.
Pe partea electronicii de putere din cadrul proiectelor de control motoare, există de asemenea o migraţiune de la tranzistoare bipolare cu poartă izolată (IGBT) la dispozitive MOSFET de putere SiC (carbură de siliciu). Soluţiile SiC oferă spaţii mai mari pentru o răcire îmbunătăţită (şi de aici posibilitatea de utilizare a unor radiatoare mai mici şi mai ieftine), conductivitate termică mai bună pentru a comanda densităţi mai mari de putere şi frecvenţe de comutaţie mai mari (mai mari de 100kHz) ce conduc la un magnetism mai mic la nivelul inversorului. Acestea conduc la reducerea costului total de proprietate (TCO) pentru client.
Pe partea controlului, frecvenţele mari de comutaţie fac probleme DSP-urilor şi MCU-urilor. Unele DSP-uri pot optimiza câteva canale pentru comutaţie de mare frecvenţă, dar nu au însă abilitatea de a se adapta rapid la cerinţe schimbătoare şi de a adăuga mai multe canale PWM (modulare în lăţimea pulsului) pentru controlul electronicii de putere (de fapt acest lucru este adesea realizat de un FPGA). ASIC şi ASSP au aceleaşi provocări legate de flexibilitate şi scalare.
FPGA-urile bazate pe flash oferă performanţe mai bune decât soluţiile bazate pe MCU/DSP pentru algoritmi de procesare de mare viteză, cu întârziere redusă, permiţând în acelaşi timp integrarea în sistem a unor funcţionalităţi suplimentare pentru a îmbunătăţi şi mai mult TCO. Proiectanţii pot utiliza FPGA bazat pe flash pentru a depăşi posibilităţile MCU/DSP prin scalare la frecvenţe de comutaţie mai mari şi la mai multe canale PWM pentru comanda electronicii de putere.
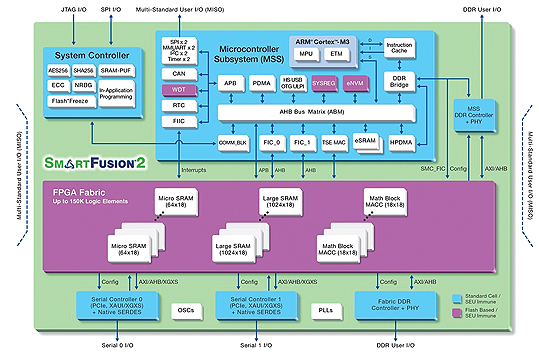
Figura 1 prezintă o soluţie în care un FPGA SoC bazat pe flash cu un microcontroler ARM® Cortex-M3 poate fi utilizat pentru controlul motorului şi funcţii de monitorizare. Structura FPGA este utilizată pentru accelerarea hardware a funcţiilor de control ale motorului pentru îmbunătăţirea performanţelor şi flexibilităţii de proiectare. Algoritmii de control motor pot fi descărcaţi pe FPGA pentru o procesare paralelă mai rapidă, cu partiţionare inteligentă pentru a asigura că toate protocoalele de comunicaţie din subsistemul microcontroler pot fi manipulate cu impact zero asupra algoritmilor de control ai motorului care rulează pe FPGA.
Eliminarea plafonării soluţiilor FPGA de astăzi o realizează sistemele modulare de blocuri IP de tip plug-and-play croite pentru implementarea tuturor modelelor matematice necesare pentru motoare. Dezvoltatorii pot determina ce blocuri IP să accelereze hardware în structura FPGA astfel încât să răspundă tuturor provocărilor legate de algoritmi de procesare. Aceste soluţii asigură operare de joasă putere, permiţând dezvoltatorilor să optimizeze sistemele pentru siguranţă în funcţionare, siguranţă a operatorilor şi securitate utilizând un proces de proiectare simplificat, ce scurtează timpul până la lansarea pe piaţă, oferind în acelaşi timp flexibilitatea şi scalabilitatea pentru a răspunde cerinţelor în continuă evoluţie.
Operare de joasă putere
FPGA-urile utilizate pentru proiecte de control motoare trebuie să reducă puterea necesară totală şi statică, în special la temperaturi şi frecvenţe ridicate. FPGA-urile ce sunt caracterizate de o celulă flash embedded cu un singur tranzistor oferă un avantaj prin comparaţie cu alternativele ce utilizează o celulă SRAM cu 6 tranzistoare ce trebuie să fie configurată de la un ROM extern în timpul pornirii. Cele mai recente soluţii FPGA bazate pe flash utilizează de asemenea o abordare cuprinzătoare pentru a minimiza energia cuprinsă în tehnologia de procesare, în arhitectura şi proiectul logicii configurabile, precum şi în caracteristicile embedded ce includ M3 MCU, 5G SERDES, DDR2/3, TSE, blocuri DSP, şi moduri de putere speciale. Această abordare conduce la o reducere de 50% a puterii totale şi de 10% a puterii statice faţă de soluţiile FPGA bazate pe SRAM.
Funcţionare sigură, Siguranţă şi Securitate
În general, un FPGA prezintă o siguranţă în funcţionare mai mare decât un microcontroler pentru implementarea unui control de motor şi a unor funcţii de reţea unde temporizarea deterministă este importantă. În vreme ce în cazul microcontrolerelor variaţia timpilor poate fi de ordinul milisecundelor, în cazul FPGA aceasta ajunge la câteva nanosecunde sau mai puţin.
Cea mai bună alegere pentru securitate este FPGA bazat pe flash, mai mult decât soluţiile bazate pe SRAM, pentru că ele stochează informaţii de configurare pe cip în memorie nevolatilă – fluxul de biţi nu este niciodată expus la pornire. Aceasta oferă de asemenea imunitate la schimbări de stare SET (single event upsets) care schimbă conţinutul SRAM. Unele FPGA-uri bazate pe flash pot de asemenea servi ca dispozitive cu funcţii de siguranţă (root-of-trust) cu capabilitate de stocare chei pentru protecţia sistemelor industriale IoT hiperconectate faţă de clonare, falsificare şi alte tipuri de atacuri. Aceste FPGA-uri se adresează necesităţilor de siguranţă cu caracteristici precum funcţie de imposibilitate de clonare fizică (PUF) din care Cheia Privată dintr-o schemă de Chei Private/Publice poate fi obţinută pentru implementarea autentificării M2M cu utilizarea infrastructurii de Chei Private (PKI). Alte caracteristici includ acceleratoare criptografice, un generator de numere aleatoare, firewall-uri hardware pentru protecţia nucleelor CPU/DSP, şi contramăsurile DPA (analiză de putere diferenţială) care, împreună, permit securităţii să fie stratificată după necesitate în sistem pentru a proteja hardware-ul şi datele.
Simplitatea proiectului printr-o abordare modulară
Blocurile IP modulare şi orientate pe performanţă permit ca algoritmii să fie implementaţi cu simplitatea plug-and-play. Proiectele pot fi cu uşurinţă transferate pe multiple platforme pentru a diminua timpul până la lansarea pe piaţă. Toate blocurile IP sunt testate cu simulări pe hardware-ul actual pentru a asigura o ieşire de cuplu precisă şi o integrare uşoară pentru crearea unor module specifice sarcinii. Fiecare bloc facilitează partajarea unor resurse FPGA comune pentru o utilizare cât mai eficientă a cipului (vedeţi Figura 2).
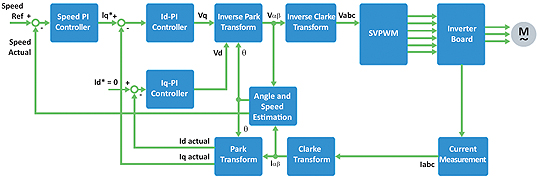
Suita de blocuri IP include de asemenea toate blocurile constructive de bază, inclusiv transformări Clarke şi Park, controlere PI (proporţional integral) pentru controlul buclei de reacţie şi SVPWM (space vector PWM).
Flexibilitate şi scalabilitate
Suita modulară IP simplifică de asemenea particularizarea şi scalarea pentru a suporta diferite combinaţii de soluţii cu motoare multi-axă sau de mare viteză, respectând în acelaşi timp standardele tehnologice în continuă evoluţie. Cu cât sunt mai compacte blocurile IP (de exemplu mai puţin de 10000 de elemente logice pentru întreaga suită), cu atât este mai mult spaţiu pentru a suporta necesităţile de integrare.
O suită IP ce rulează pe un FPGA poate fi scalată de la 2 canale de comandă motoare de curent continuu fără perii / pas cu pas până la o soluţie cu 6 axe, sau să extindă performanţele motorului peste 70000 RPM, în funcţie de cerinţe. O cale de scalare către controlul FOC multi-axă este multiplexarea diviziunii de timp pentru fiecare buclă FOC din dispozitiv, astfel încât fiecare motor să poată fi controlat individual pentru diferite cerinţe de cupluri şi viteze de referinţă. Totul este implementat în structura FPGA, lăsând subsistemul microprocesorului disponibil pentru rularea protocoalelor de comunicaţie, pentru oferirea interfeţei om – maşină şi pentru alte sarcini.
Proiectanţii de motoare electrice trebuie să respecte cerinţele de energie disponibilă, asigurând în acelaşi timp că sistemele se pot adapta şi scala. FPGA-urile SoC bazate pe flash oferă o alternativă tot mai atractivă la DSP, MCU, ASIC şi ASSP, combinând puterea de procesare necesară şi opţiunile de programabilitate superioare pentru accelerarea şi partajarea inteligentă a funcţionalităţii. FPGA-urile bazate pe flash adaugă avantajul securităţi, putând servi ca dispozitiv de încredere pentru comunicaţie IoT sigură într-o fabrică conectată ■
Microsemi
www.microsemi.com