


Formate tipice de motoare pas cu pas. Stânga: Motor hibrid bipolar NEMA 17, de înaltă precizie. Acesta are o rezoluție la pas întreg de 200 de pași pe rotație, corespunzător unui unghi de rotație de 1.8°/pas. Dreapta: un motor economic unipolar cu magneți permanenți cu reductor 64:1. Aceasta oferă o rezoluție la ieșire de 2048 pași pe rotație.
Controlerele pentru motoare electrice sunt dispozitive (sau grupuri de dispozitive) utilizate pentru a controla pornirea, oprirea și viteza unui motor electric. Acestea pot fi acționate manual sau programate să funcționeze automat, având funcții precum selectarea direcției de rotație, reglarea sau limitarea cuplului, ajustarea vitezei și oprirea sau pornirea motorului. Aurocon COMPEC vă oferă o gamă variată de controlere pentru motoare, de la branduri de top din industrie, precum Electromen OY, Schneider Electric, Siemens, Sprint Electric și altele.
Ce este motorul pas cu pas?
La fel ca un motor PMDC convențional (cu sau fără perii), motorul pas cu pas transformă energia electrică în mișcare de rotație a unui arbore. Spre deosebire de celelalte tipuri, acesta se rotește în pași preciși și poate menține o anumită poziție. Această caracteristică îl face ideal pentru acționarea articulațiilor brațelor robotizate, mașinilor de frezat CNC și imprimantelor – atât convenționale, cât și 3D. În ceea ce privește controlul poziției, motorul pas cu pas poate reprezenta o alternativă la servomotoarele, utilizate pe scară largă. Totuși, lucrurile nu sunt întotdeauna atât de simple…
Motoare pas cu pas versus motoare servo
În această etapă, este important să clarificăm ce înseamnă termenul „servo”. Acesta poate fi interpretat ca „servomecanism”, un ansamblu format dintr-un servomotor cu reductor, un senzor de feedback pentru poziția unghiulară și electronica aferentă.
Un servomotor poate fi:
- un motor PMDC cu perii, de tip economic (cum se găsește în servo-urile RC),
- un motor de curent continuu fără perii, de înaltă precizie,
- sau chiar un motor sincron de curent alternativ, utilizat în aplicații industriale de mare putere.
 În cele ce urmează, vom compara un motor pas cu pas de dimensiuni mici, potrivit aplicațiilor „domestice”, cu un motor de tip RC servo. Alegerea între cele două tehnologii implică evaluarea mai multor avantaje și dezavantaje, în funcție de cerințele aplicației. Un criteriu esențial este capacitatea motorului de a roti arborele de ieșire la un unghi precis și de a menține acea poziție stabilă.
În cele ce urmează, vom compara un motor pas cu pas de dimensiuni mici, potrivit aplicațiilor „domestice”, cu un motor de tip RC servo. Alegerea între cele două tehnologii implică evaluarea mai multor avantaje și dezavantaje, în funcție de cerințele aplicației. Un criteriu esențial este capacitatea motorului de a roti arborele de ieșire la un unghi precis și de a menține acea poziție stabilă.
Controlul poziției
Servo
Necesită un sistem de control al poziției cu buclă închisă pentru a acționa motorul. Servomotoarele RC, populare și accesibile, integrează toate aceste componente într-un singur pachet compact și sunt disponibile pe scară largă.
Desigur, performanțele lor sunt limitate: oferă doar o mișcare pe o jumătate de rotație (aproximativ 180°) a arborelui de ieșire. Totuși, ele permit poziționarea absolută. Pentru a funcționa, este suficient să li se transmită un semnal PWM de 50 Hz, cu o lățime a impulsului cuprinsă între 1ms și 2ms. De exemplu, un impuls de 1,5ms va poziționa arborele la mijlocul cursei, adică la 90°.
Motorul pas cu pas
Se poate acționa cu niște componente electronice de acționare foarte simple și nu necesită control prin feedback, deși sunt necesare cel puțin patru conexiuni de „semnal” față de cea a servomotorului. În ciuda conexiunilor electrice suplimentare, motorul pas cu pas nu poate atinge o poziție absolută; este posibilă doar o mișcare relativă.
Menținerea poziției
Servo
Poate ajunge rapid într-o poziție, însă, din cauza sistemului de control cu feedback, nu menține întotdeauna cu ușurință acea poziție în fața unui cuplu de sarcină semnificativ. Diferența (eroarea) dintre poziția dorită și cea reală determină acționarea motorului. Motorul se oprește când eroarea este zero, dar orice cuplu aplicat asupra brațului va încerca să îl deplaseze. Dacă acest cuplu este suficient pentru a mișca brațul și a genera o nouă eroare, motorul va porni din nou pentru scurt timp, încercând să revină în poziția dorită. Această ciclicitate duce adesea la binecunoscutul „bâzâit” al servomotorului – nu doar deranjant, ci și un semnal al uzurii mecanice sau al unei posibile defecțiuni iminente, mai ales dacă sarcina nu este redusă.
Este important de reținut că motorul unui astfel de servomecanism este, de obicei, un simplu motor PMDC cu perii, care poate consuma curenți mari atunci când este „blocat” și, astfel, se poate arde. Pentru sarcini grele, aceste servomotoare funcționează cel mai bine cu arborele de ieșire orientat vertical, astfel încât gravitația să nu influențeze negativ funcționarea.
Motorul pas cu pas
În schimb, acest tip de motor este proiectat tocmai pentru a menține poziția. Dacă rotești manual arborele unui motor pas cu pas nealimentat, vei observa o mișcare sacadată. Aceasta se datorează faptului că rotorul trece prin pași distincți între pozițiile de „blocare”. Rotorul cu magneți permanenți este acționat prin interacțiunea câmpurilor magnetice generate de bobinele alimentate secvențial. Dacă secvența se oprește, iar anumite bobine rămân alimentate, rotorul este menținut într-o poziție fixă.
În această stare, motorul generează un cuplu de menținere puternic, capabil să reziste la sarcini externe. O caracteristică standard a motoarelor pas cu pas este că prin ele curge curent maxim atunci când rotorul este staționar, ceea ce determină încălzirea motorului și a driverului acestuia.
Moduri de operare
Bipolar
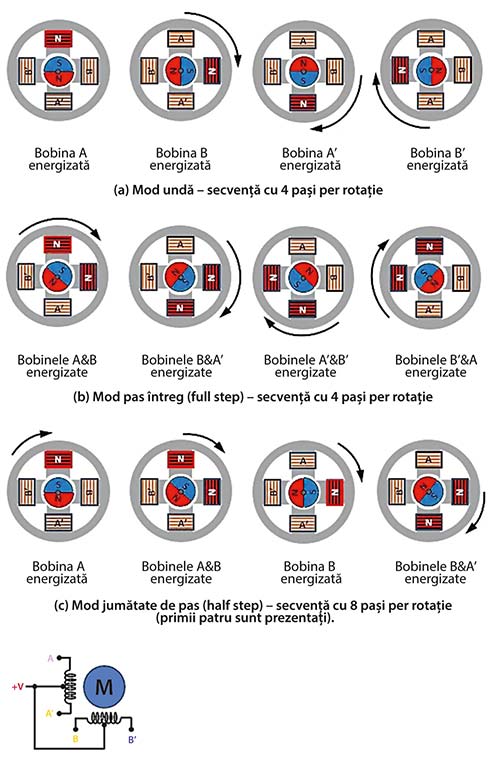
Figura1: Motor pas cu pas cu magneți permanenți bipolar. (©W.G.Marshall 2024)
Un motor pas cu pas are, în general, minimum patru conexiuni – câte una la fiecare capăt al celor două înfășurări statorice, A și B (sau „faze”), dispuse în patru bobine amplasate la 90° una față de cealaltă, în jurul unui rotor cu magnet permanent. Acesta este cunoscut drept un motor bifazat cu 4 fire (Figura 1). Bobinele dintr-o fază sunt montate diametral opus și sunt înfășurate astfel încât să genereze polarități magnetice opuse atunci când sunt alimentate. Pentru a inversa polaritatea, de exemplu de la N–S la S–N, este suficient să se inverseze direcția curentului prin acea fază. Această metodă se numește funcționare bipolară.
Acționarea rotorului
Acționarea rotorului se face prin activarea și dezactivarea curenților de fază sau prin inversarea direcției acestora, într-o secvență precisă.
Mod undă (Wave) (Figura 1.a) – O singură fază este activă la un moment dat: A → B → A′ → B′ → A, unde A′ și B′ indică inversarea curentului. Acest mod consumă mai puțin curent, dar oferă și un cuplu mai redus, atât dinamic, cât și de menținere.
Mod pas întreg (Full-Step) (Figura 1.b) – Ambele faze sunt alimentate simultan, ceea ce necesită mai mult curent, dar oferă și un cuplu mai mare. Doi poli Nord adiacenți ai statorului țin aliniat polul Sud al rotorului la mijlocul distanței dintre ei. Secvența devine: AB → B′A → A′B′ → AB′ → AB.
Mod jumătate de pas (Half-Step) (Figura 1.c) – De regulă, un motor are nevoie de 4 pași pentru o rotație completă, dar combinând secvențele modului undă și ale celui cu pas întreg, rezoluția poate fi dublată la 8 pași. Secvența este: A → AB → B → B′A → A′ → A′B′ → B′ → AB′ → A. Cuplul variază însă pe parcurs, din cauza alternării între alimentarea unei singure bobine și a ambelor simultan.
Unipolar
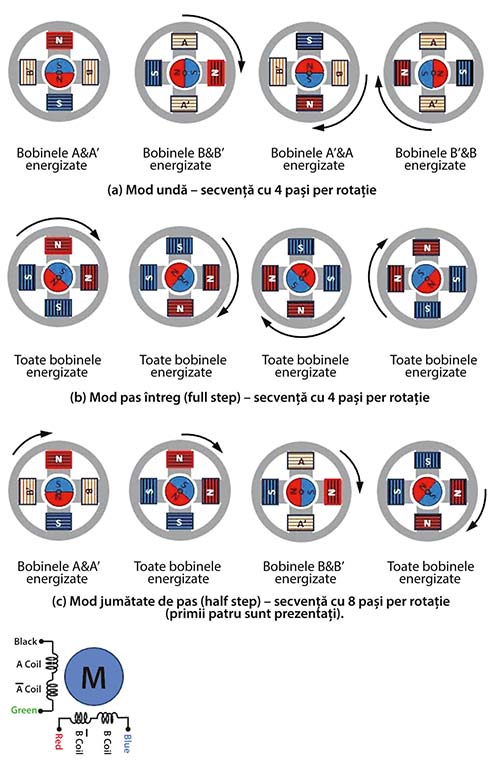
Figura 2: Motor pas cu pas cu magneți permanenți unipolar. (©W.G.Marshall 2024)
Motoarele bipolare necesită componente electronice de comandă capabile să inverseze direcția curentului prin fiecare fază, atunci când este necesar. Totuși, prin adăugarea unei conexiuni suplimentare între bobinele fiecărei faze și conectarea acesteia la borna pozitivă a sursei de alimentare, se poate elimina necesitatea unui circuit complex de inversare a curentului. În acest caz, patru drivere simple cu tranzistoare de putere sunt suficiente (Figura 2).
Mod undă (Wave) (Figura 2.a) – La fel ca în cazul motorului bipolar, este activată o singură fază la un moment dat. Comanda simplificată înseamnă că doar o bobină este activă în fiecare pas: A → B → A′ → B′ → A. Cu o singură bobină activă, cuplul este redus.
Mod pas întreg (Full-Step) (Figura 2.b) – Similar cu funcționarea motorului bipolar, dar cu două bobine active simultan pentru fiecare pas: AB → B′A → A′B′ → AB′ → AB. Această configurație oferă un cuplu mai mare.
Mod jumătate de pas (Half-Step) (Figura 2.c) – Combinând secvențele din modurile undă și pas întreg, se obține o rezoluție dublă, cu o secvență de 8 pași: A → AB → B → B′A → A′ → A′B′ → B′ → AB′ → A. Și în acest caz, cuplul este inegal din cauza alternării între una și două bobine active.
Motoarele în realitate
Designul motorului prezentat în figurile 1 și 2 nu reflectă o implementare practică. Este util pentru a ilustra principiul de funcționare, însă permite doar maximum opt pași pe rotație, ceea ce corespunde unui unghi de pas de 45°. În aplicațiile care necesită precizie ridicată, în general este nevoie de o rezoluție sub un grad, atât pentru poziționare exactă, cât și pentru o mișcare lină, fără vibrații.
Motorul pas cu pas hibrid NEMA-17
Motorul din stânga, prezentat în prima imagine a articolului, ar trebui să vă fie familiar: este folosit pe scară largă pentru mișcări de precizie în robotică, imprimante și, mai recent, în imprimante 3D. Este relativ accesibil și atât de răspândit încât pare surprinzător că un singur tip de motor poate acoperi atât de multe aplicații. NEMA-17 se referă, de fapt, la o dimensiune standardizată a carcasei, stabilită de Asociația Națională a Producătorilor de Echipamente Electrice (National Electrical Manufacturers Association, SUA).
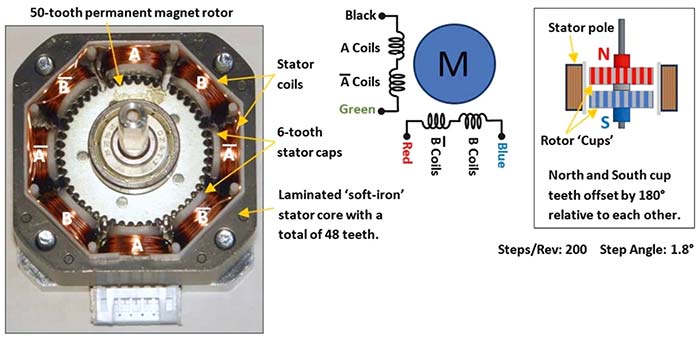
Figura3: Motor pas cu pas hibrid cu 2 faze (200 de pași pe rotație și 1,8° / pas). (©W.G.Marshall 2024)
Astfel, NEMA-17 indică doar că motorul are o placă frontală pătrată de montare de 1,7 × 1,7 inch, fără a oferi informații despre caracteristicile electrice sau mecanice. Dispozitivul prezentat aici are codul de produs 42HS34-1334, cu un curent per fază de 1,33 A, un cuplu de menținere de 2,6 kg·cm și un unghi de pas de 1,8° (Figura 3).
Dispune de opt bobine
O privire asupra motorului NEMA-17, cu o parte a capacului de capăt îndepărtată, arată că statorul său are un design similar cu modelul teoretic, cu excepția faptului că dispune de opt bobine în loc de patru. Rotorul are un design complet diferit: magnetul permanent este montat axial, iar rotorul este împărțit în discuri Nord și Sud. Aceste discuri sunt dințate și seamănă cu roți dințate care par să se alinieze, dar nu se angrenează cu dinții similari de pe miezurile statorului. Rotoarele dințate explică denumirea acestui tip de motor ca fiind hibrid, deoarece combină caracteristicile unui motor pas cu pas cu magneți permanenți cu cele ale unui motor cu reluctanță. Distanța dintre dinții rotorului și statorului trebuie să fie foarte mică și precisă, de unde și necesitatea unei construcții mecanice riguroase. Efectul de reluctanță crește semnificativ numărul de pași per rotație, conform formulei:
Pași / rotație = 2 × (număr de dinți pe rotor) × (număr de faze)
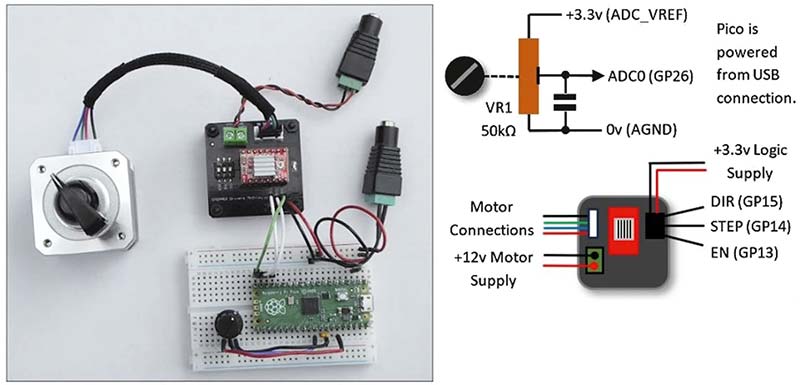
Figura 4. A4998 – driver pentru motor pas cu pas. (©W.G.Marshall 2024)
Motorul din figura 3 are un rotor cu 50 de dinți și două faze, rezultând o rezoluție de 200 de pași per rotație și un unghi de pas de 1,8°. Acum, să ne uităm la interfața pentru microcontrolerul Raspberry Pi Pico (Nr. Stoc RS 212-2162), prezentată în Figura 4.
Având un format bipolar cu patru fire, acest motor necesită un circuit de interfață care poate inversa fluxul de curent prin una sau ambele faze, ca răspuns la semnalele digitale I/O de la Pico. Un astfel de circuit este omniprezentul driver „H-Bridge”, utilizat frecvent pentru controlul direcției de rotație a motoarelor PMDC cu perii. Pentru curenți de fază în jur de 1A, dispozitivul STM L293D (nr. stoc RS 714-0622), capsulă DIP, este ideal, deoarece conține două circuite de driver. Circuitele H-Bridge permit microcontrolerului Pico să controleze viteza de pas a motorului, direcția și selecția modului de pas – Undă, Pas întreg și Jumătate de pas – așa cum a fost descris mai sus.
Caracteristici avansate

Placa de dezvoltare Raspberry Pi Pico 264 kB RP2040. Nr. stoc RS: 212-2162. Producător: Raspberry Pi. Cod de producător: SC0916
Poate ați observat că interfața din standul de testare din Figura 4 nu include dispozitivul L293D. În schimb, este utilizat un modul mic – PCB-ul roșu – bazat pe un cip specializat pentru drivere pas cu pas, A4998 de la Allegro. Pe lângă faptul că este ieftin și disponibil pe scară largă, acest dispozitiv oferă o serie de simplificări software și îmbunătățiri ale performanței.
Acționare în curent constant
Cuplul unui motor pas cu pas scade odată cu creșterea vitezei de rotație atunci când este alimentat la o tensiune constantă printr-un circuit H-bridge de bază. Acest efect, cauzat de scăderea curentului de fază, poate fi parțial compensat prin semnalul provenit de la un rezistor de măsură a curentului (folosit ca element de feedback) în fiecare circuit driver de fază, semnal care, prin intermediul altor circuite, conduce la creșterea tensiunii de alimentare.
Micro-pășire
Posibilitatea de a controla curentul de fază în acest mod permite o caracteristică foarte utilă: o reducere suplimentară a dimensiunii pasului. Pasul pe jumătate se realizează prin rotirea bobinelor adiacente, astfel încât rotorul ajunge la jumătatea distanței dintre ele. Curenții de fază sunt egali, rezultând o „tracțiune” egală din partea fiecărei bobine. Dar ce-ar fi dacă curenții ar putea fi inegali, astfel încât rotorul să fie ținut mai aproape de o bobină decât de cealaltă? După cum v-ați putea aștepta, acest lucru deschide perspectiva „pasului pe un sfert”. De fapt, cipul A4998 poate fi configurat să ofere pasuri de 1/4, 1/8, chiar 1/16. Cu alte cuvinte, acest motor poate funcționa la 3200 de pași per rotație.
Sarcină redusă pe microcontroler
Toată secvențierea curenților bobinelor este gestionată de A4998, astfel încât software-ul driverului microcontrolerului trebuie să furnizeze doar un semnal pas cu pas, un semnal de direcție și, opțional, trei linii GPIO pentru selectarea modului pas cu pas.
Dacă utilizați o placă de dezvoltare cu microcontroler cu socluri MikroBUS, modulul Stepper 2 Click (Număr stoc RS 136-0748) îndeplinește aceeași funcție. Modulul A4998, o soluție ieftină, se conectează la o placă breakout (de asemenea, disponibilă pe scară largă), care permite setarea celor trei semnale de selecție a modului de funcționare în pași printr-un comutator DIP.
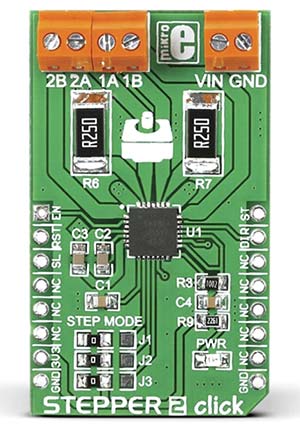
Kit de dezvoltare MikroElektronika Stepper 2 pentru A4988. Nr. stoc RS: 136-0748. Producător: MikroElektronika. Cod de producător: MIKROE-1926. Nr. articol Distrelec: 30154952
Configurația hardware din Figura 4 include un potențiometru care furnizează informații despre poziția software-ului demonstrativ sub forma unei tensiuni analogice digitizate de convertorul Pico, ADC0. Rotirea butonului ar trebui să producă o mișcare corespunzătoare a axului motorului pas cu pas, într-un mod similar cu demonstrația servo.
Note tehnice despre ADC-ul integrat în Pico
Rețineți pinii Pico la care este conectat potențiometrul. Aceștia sunt diferiți de cei utilizați în demonstrația servo. Configurația plăcii de testare pentru servomotor are capetele potențiometrului conectate la unul din pinii GND și 3V3(OUT) și funcționează perfect. Aceeași conexiune, folosită cu motorul pas cu pas, a dus la o funcționare foarte instabilă – fără ca potențiometrul să fie atins. Motivul: zgomot electric excesiv pe cei doi pini.
Dar de ce nu a fost afectat și servomotorul? Pentru că sistemul său intern de control al feedbackului are o “bandă inactivă” (deadband), adică servomotorul răspunde doar la modificări ale semnalului de feedback care depășesc un anumit prag.
Motorul pas cu pas, în schimb, nu are o astfel de bandă inactivă implicită, iar zgomotul genera mai mult decât o simplă instabilitate – apăreau pași neintenționați. Reconectarea potențiometrului astfel încât să folosească masa analogică (AGND) și ADC_VREF a redus semnificativ mișcările aleatorii, dar a rămas o instabilitate de un pas atunci când motorul trebuia să rămână staționar.
Adăugarea unei benzi inactive software pentru a ignora variațiile minore cauzate de zgomot a rezolvat complet problema. Deși ADC-ul Pico are specificată o rezoluție de 12 biți, tensiunea de referință internă (ADC_VREF) nu este suficient de stabilă, astfel că, în practică, se obțin doar aproximativ 9 biți utili. Pentru aplicații de înaltă precizie, este necesară o referință de tensiune externă.
Motorul pas cu pas cu magneți permanenți 28BYJ-48
Acum să trecem de la motoarele de precizie în format NEMA la celălalt capăt al scalei: dispozitive mici și ieftine, utilizate în aplicații unde este necesară doar deplasarea dintr-o poziție în alta, fără cerințe de precizie.
Exemplu: lamelele de direcționare a fluxului de aer de la o unitate de aer condiționat montată pe tavan. Acest mic motor unipolar cu 5 fire are un rotor cu magnet permanent montat radial, plasat în interiorul a două bobine „stivuite”, asemănător cu miezul mobil al unui solenoid. Pentru a obține mișcare de rotație, câmpul magnetic generat de bobine este rotit cu 90° prin utilizarea unor plăci din fier moale amplasate lateral, lângă fiecare bobină. Construcția este destul de simplă, iar acest lucru limitează performanța la doar 32 de pași/rotație.
Un reductor cu raport de 64:1 crește acest număr la 2048 pași/rotație pe arborele de ieșire. Nepotrivirea acestui motor pentru aplicații ce necesită pași preciși sau viteză mare de rotație este evidentă.
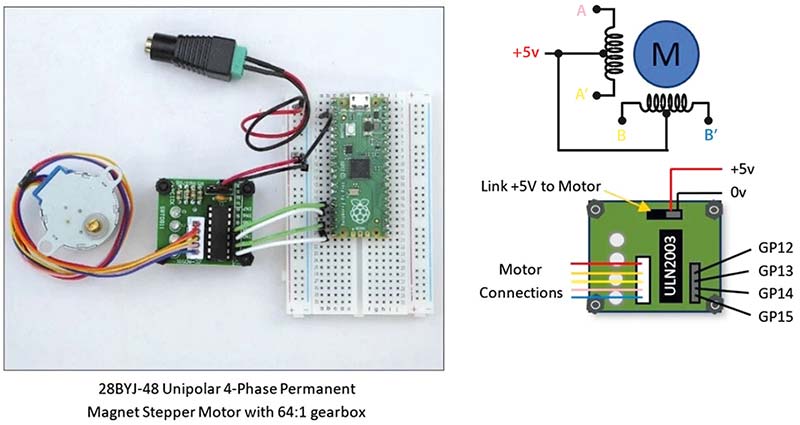
Figura 5: Utilizarea unui driver ULN2003 pentru comanda 28BYJ-48 – Motor pas cu pas cu magneți permanenți unipolar cu reductor 64:1. (©W.G.Marshall 2024)
Un design tipic de driver este prezentat în figura 5.
Aceasta reprezintă o soluție cu hardware minim și software maxim. Fiind un motor unipolar, nu necesită complexitatea driverelor de tip punte H pentru a inversa fluxul de curent – sunt suficiente doar patru comutatoare cu un singur tranzistor, câte unul pentru fiecare fază.
Se utilizează un alt dispozitiv foarte popular: ULN2003A (436-8451) de la Texas Instruments, un circuit integrat cu șapte etaje de tranzistoare Darlington (500 mA fiecare), cu diode de protecție integrate. Acesta permite pinilor GPIO de curent scăzut ai plăcii Pico să comande fazele motorului, care necesită tensiuni mai mari și curenți mai ridicați.Toată secvențierea semnalelor este realizată în software de către codul care rulează pe microcontroler.
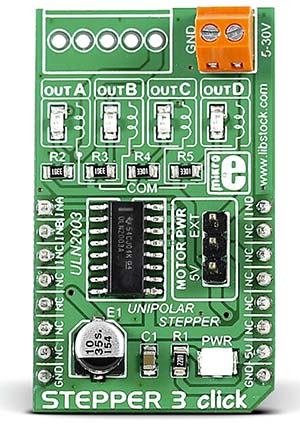
Kit de dezvoltare MikroElektronika Stepper 3 click pentru ULN2003. Nr. stoc RS: 136-0777. Producător: MikroElektronika. Cod de producător: MIKROE-2035. Nr. articol Distrelec: 30163654
Dacă utilizați o placă cu microcontroler cu socluri MikroBUS, atunci modulul Stepper 3 Click (Număr stoc RS 136-0777) îndeplinește aceeași funcție.
Ce trebuie ales?
Pentru aplicațiile de dimensiuni reduse, care necesită un control de înaltă precizie al poziției și al mișcării, există, în realitate, o singură soluție: motoarele pas cu pas hibride în format NEMA. Acestea sunt disponibile de la numeroși producători și sunt economice datorită volumelor mari de producție.
Principala preocupare a proiectantului este asigurarea unei surse de alimentare suficient de puternice, capabile să susțină curentul total de menținere, mai ales în proiectele cu mai multe motoare. În condiții extreme, poate fi necesară răcirea forțată (cu ventilatoare) atât pentru motoare, cât și pentru circuitele de acționare a bobinelor.
Aurocon COMPEC vă oferă, la adresa https://www.rs-online.com/designspark , o comunitate și platformă online de inginerie – DesignSpark – cu instrumente, resurse și asistență tehnică. Aici puteți accesa articole, forumuri de discuții și unelte software de proiectare și simulare. De asemenea, la adresa https://ro.rsdelivers.com/ puteți consulta întreaga ofertă de produse tehnice, inclusiv motoare electrice, drivere, circuite amplificatoare de putere și microcontrolere.
Autor: Bogdan Grămescu
Aurocon Compec – https://www.compec.ro
![]()
Sursa: https://www.rs-online.com/designspark/microcontroller-interfaces-stepper-motors