

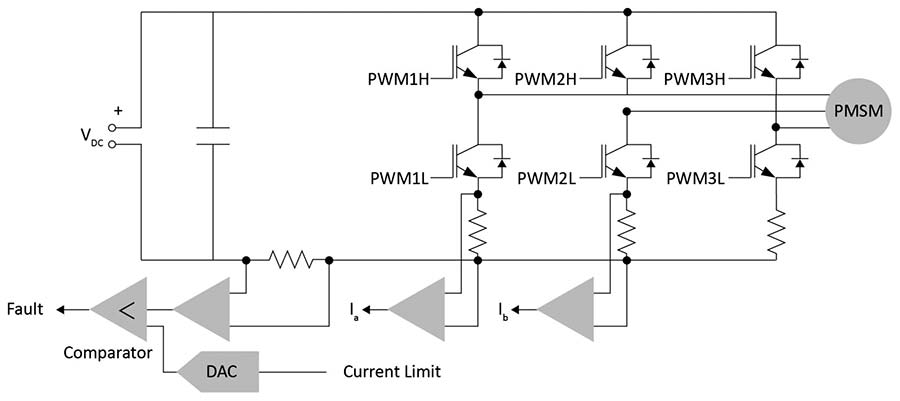
Figura 1: Un sistem de control PMSM trifazat fără senzori care utilizează un invertor de tensiune trifazat. (© Microchip Technology)
Există doi factori principali care stau la baza adoptării sistemelor avansate de control al motoarelor bazate pe motoare sincrone cu magneți permanenți (PMSM) cu control orientat după câmp (FOC) fără senzori: îmbunătățirea eficienței energetice și accentuarea diferențierii produselor. Deși s-a dovedit că un PMSM cu FOC fără senzori poate atinge ambele obiective, succesul necesită un ecosistem de proiectare, care să ofere o abordare holistică de implementare. Un ecosistem holistic va permite proiectanților să depășească provocările de implementare care au îngreunat adoptarea sa.
De ce PMSM?
Un motor PMSM este un motor fără perii care utilizează comutare electronică. Acesta este adesea confundat cu motorul de curent continuu fără perii (BLDC) – un alt membru al familiei de motoare fără perii care utilizează, de asemenea, comutarea electronică, dar care prezintă ușoare diferențe constructive. Construcția PMSM este optimizată pentru FOC, în timp ce motorul BLDC este optimizat pentru a utiliza o tehnică de comutare în 6 trepte. Optimizarea determină ca PMSM să aibă o forță contraelectromotoare (Back-Electromotive Force – Back-EMF) sinusoidală, iar motorul BLDC să aibă o forță contraelectromotoare trapezoidală.
Senzorii de poziție a rotorului utilizați cu fiecare dintre aceste motoare sunt, de asemenea, diferiți. PMSM utilizează,tipic, un codificator de poziție, în timp ce motoarele BLDC utilizează trei senzori Hall pentru operare. În cazul în care costul reprezintă o preocupare, proiectanții pot lua în considerare implementarea tehnicilor fără senzori care elimină costul magnetului, al senzorilor, al conectorilor și al cablajului. Eliminarea senzorilor îmbunătățește, de asemenea, fiabilitatea, deoarece există mai puține componente care pot ceda într-un sistem. Atunci când se compară un PMSM fără senzori cu un BLDC fără senzori, PMSM fără senzori, care utilizează un algoritm FOC, oferă performanțe mai bune, utilizând în același timp un design hardware similar cu un cost de implementare comparabil.
Aplicațiile care vor beneficia cel mai mult în urma trecerii la tehnologia PMSM sunt cele care utilizează în prezent un motor de curent continuu cu perii (BDC) sau un motor de inducție de curent alternativ (ACIM). Principalele beneficii ale schimbării includ un consum mai mic de energie, o viteză mai mare, un cuplu mai uniform, un zgomot audibil mai mic, o durată de viață mai lungă și dimensiuni mai mici, ceea ce face ca aplicația să fie mai competitivă. Totuși, pentru a obține aceste beneficii prin utilizarea unui PMSM, un dezvoltator trebuie să implementeze o tehnică de control FOC mai complexă, împreună cu alți algoritmi specifici aplicației, pentru a îndeplini cerințele sistemului. Deși un PMSM este mai scump în comparație cu un BDC sau un ACIM, acesta oferă substanțial mai multe avantaje.
Provocări legate de implementare
Materializarea avantajelor oferite de utilizarea unui PMSM necesită însă o înțelegere a complexității hardware inerente implementării unei tehnici avansate de control FOC al motorului, precum și a expertizei în domeniu care este necesară. Figura 1 prezintă un sistem de control PMSM trifazat fără senzori care utilizează un invertor de tensiune trifazat. Controlul invertorului necesită trei perechi de semnale PWM de înaltă rezoluție, care sunt interconectate și o mulțime de semnale analogice de reacție, care necesită condiționarea semnalului. Sistemul necesită, de asemenea, caracteristici de protecție hardware pentru toleranță la defecte, fiind proiectat cu ajutorul comparatoarelor analogice de mare viteză, pentru un răspuns rapid. Aceste componente analogice suplimentare necesare pentru detecție, control și protecție măresc costul soluției, ele nefiind necesare pentru un proiect obișnuit de motor BDC sau pentru o simplă comandă V/F (Volți pe Hertz) a unui ACIM.
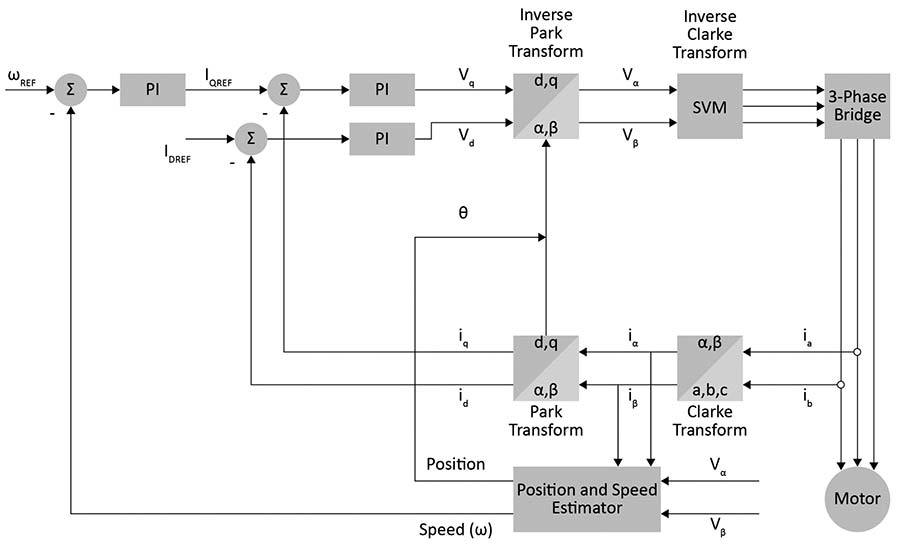
Figura 2: Diagrama bloc a unui FOC standard fără senzori. (© Microchip Technology)
Există, de asemenea, timpul de dezvoltare necesar pentru definirea și validarea specificațiilor componentelor pentru aplicația de control al motorului PMSM. Pentru a face față acestor provocări, proiectanții pot selecta un microcontroller, care oferă un nivel înalt de integrare analogică cu specificațiile dispozitivului adaptate pentru controlul motorului PMSM. Acest lucru va reduce numărul de componente externe necesare și va optimiza lista de materiale (BOM). Dispozitivele pentru controlul motoarelor înalt integrate sunt acum disponibile cu PWM-uri de înaltă rezoluție pentru a facilita implementarea algoritmilor de control avansat, periferice analogice de mare viteză pentru măsurători de precizie și condiționarea semnalelor, periferice hardware necesare pentru siguranța funcțională și interfețe seriale pentru comunicație și depanare.
La fel de dificilă este și interacțiunea dintre software-ul de control al motorului și comportamentul electromecanic al motorului. Figura 2 prezintă schema bloc standard a unei aplicații FOC fără senzori. Pentru a trece de la un concept la un proiect real, este necesară o înțelegere a arhitecturii controlerului și a instrucțiunilor procesorului de semnal digital (DSP) pentru implementarea buclelor de control care necesită calcul matematic intens și sunt critice din punct de vedere al timpului.
Pentru a obține performanțe fiabile, bucla de control trebuie să se execute în decurs de o perioadă PWM. Există trei motive care impun ca buclele de control să fie optimizate în funcție de timp.
1) Constrângere: Utilizați o frecvență de comutație PWM la sau peste 20KHz (perioadă de timp de 50uS) pentru a suprima zgomotul acustic produs de comutația invertorului.
2) Pentru a obține un sistem de control cu o lățime de bandă mai mare, bucla de control trebuie să se execute în cadrul unei perioade PWM.
3) Pentru a susține alte sarcini secundare, cum ar fi monitorizarea sistemului, funcțiile specifice aplicației și comunicația, bucla de control trebuie să se execute și mai rapid. Ca urmare, algoritmul FOC trebuie să urmărească să se execute în mai puțin de 10uS.
Mulți producători oferă exemple de software FOC cu estimatori fără senzori pentru poziția rotorului. Cu toate acestea, înainte de a putea începe să rotească motorul, algoritmul FOC trebuie să configureze diverși parametri pentru a se potrivi cu motorul și hardware-ul. Este necesară o optimizare suplimentară a parametrilor și coeficienților de control pentru a îndeplini obiectivele de viteză și eficiență necesare. Acest lucru se realizează printr-o combinație de: 1) determinarea parametrilor cu ajutorul fișei tehnice a motorului și 2) experimentarea printr-o metodă de încercare și eroare. Dezvoltatorii vor trebui să recurgă la metoda de încercare și eroare atunci când parametrii motorului nu sunt întotdeauna bine definiți în fișa tehnică a motorului sau atunci când proiectanții nu au acces la echipamente de măsurare de înaltă precizie. Acest proces de reglare manuală necesită timp și experiență.
Motoarele PMSM sunt utilizate în numeroase aplicații variate, care funcționează în medii diferite sau cu constrângeri de proiectare specifice. De exemplu, la un ventilator de radiator de mașină, este posibil ca paletele ventilatorului să se rotească liber în sens invers din cauza vântului atunci când motorul urmează să fie pornit. Pornirea motorului PMSM cu un algoritm fără senzori în aceste condiții reprezintă o provocare și este posibil să deterioreze invertorul. O soluție este detectarea sensului de rotație și a poziției rotorului și utilizarea acestor informații pentru a încetini rotirea până la oprire prin frânare activă, înainte de a porni motorul. Similar, ar putea fi necesară implementarea unor algoritmi suplimentari, cum ar fi MTPA (Maximum Torque Per Ampere – cuplu maxim per amper), compensarea cuplului și slăbirea câmpului[1] etc. Acești algoritmi suplimentari, specifici aplicației, sunt necesari pentru a dezvolta o soluție practică, dar, de asemenea, sporesc complexitatea proiectării prin creșterea timpului de dezvoltare și prin complicarea verificării software-ului.
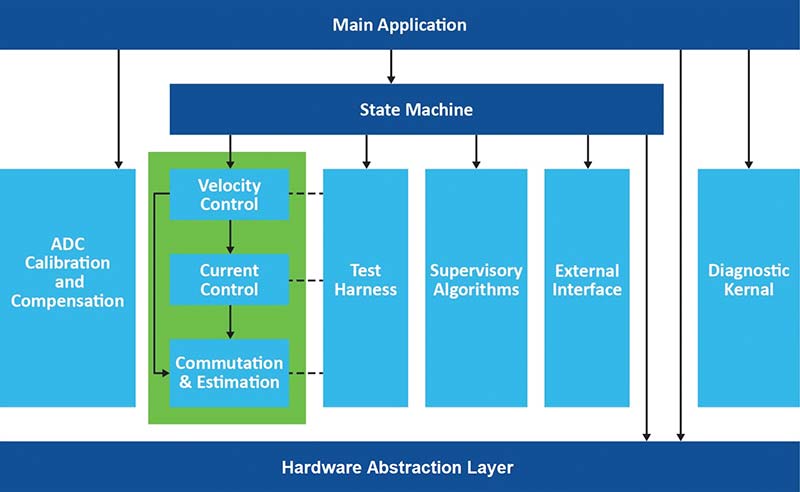
Figura 3: Framework de aplicație pentru FOC. (© Microchip Technology)
O soluție pentru a reduce complexitatea este ca proiectanții să creeze o arhitectură software modulară, care să permită adăugarea algoritmilor specifici aplicației la algoritmul FOC fără a afecta execuția critică din punct de vedere al timpului. Figura 3 prezintă arhitectura software a unei aplicații tipice de control al motorului în timp real. În centrul structurii se află funcția FOC, care are o restricție de sincronizare dură și multe funcții suplimentare specifice aplicației. O mașină de stare din interiorul framework-ului interfațează aceste funcții de control cu aplicația principală. Arhitectura are nevoie de o interfață bine definită între blocurile de funcții software pentru a o face modulară și pentru a facilita întreținerea ușoară a codului. Un framework modular sprijină integrarea diferiților algoritmi specifici aplicației împreună cu alte rutine de monitorizare, protecție și siguranță funcțională a sistemului.
Un alt beneficiu al unei arhitecturi modulare este separarea layer-ului de interfață periferică (sau layer-ul de abstractizare hardware) de software-ul de control al motorului, ceea ce permite proiectanților să migreze fără probleme IP-ul lor de la un controler de motor la altul, pe măsură ce caracteristicile aplicației și cerințele de performanță se schimbă.
Cerința unui ecosistem complet
Abordarea acestor provocări necesită un ecosistem de control al motorului care să fie adaptat pentru proiectele FOC fără senzori. Controlerul motorului, hardware-ul, software-ul și mediul de dezvoltare ar trebui să funcționeze împreună pentru a simplifica procesul de implementare a algoritmilor avansați de control al motorului. Pentru a realiza acest lucru, ecosistemul ar trebui să aibă următoarele caracteristici:
- Un instrument de nivel înalt pentru a automatiza măsurarea parametrilor motorului, proiectarea buclelor de control și generarea codului sursă, care să permită proiectanților fără expertiză în domeniu să implementeze controlul motorului FOC și să scrie și să depaneze coduri complexe, critice din punct de vedere al timpului și, implicit, mari consumatoare de timp
- Un cadru de aplicație pentru FOC și diverși algoritmi suplimentari specifici aplicațiilor care reduc timpul de dezvoltare și testare
- Controlerele motorului cu răspuns determinist și perifericele analogice integrate pentru condiționarea semnalelor și protecția sistemului într-un singur cip reduc costul total al soluției
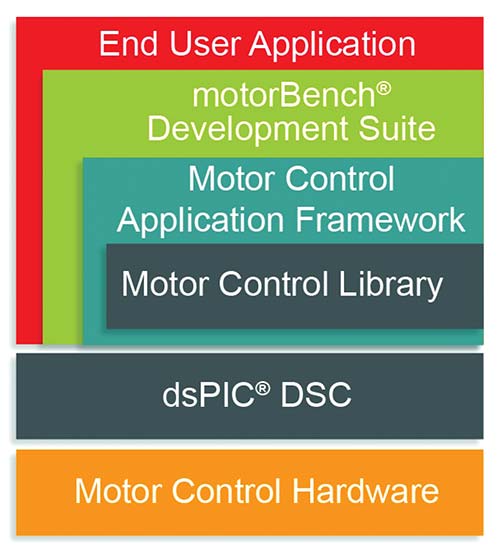
Figura 4: Arhitectura ecosistemului de control al motorului de la Microchip. (© Microchip Technology)
Figura 4 prezintă un exemplu de arhitectură a unui ecosistem de control al motorului care include cadrul aplicației și o suită de dezvoltare pentru un controler de semnal digital (DSC) pentru controlul motoarelor – dsPIC33 – de înaltă performanță. Suita de dezvoltare este construită în jurul unui instrument de dezvoltare software FOC bazat pe GUI, care poate măsura parametrii critici ai motorului și poate regla automat câștigurile de control cu reacție. De asemenea, generează codul sursă necesar pentru un proiect creat în mediul de dezvoltare care utilizează MCAF (Motor Control Application Framework). În centrul stivei de soluții se află biblioteca de control al motorului, care face posibilă implementarea funcțiilor buclei de control a aplicației, critice din punct de vedere al timpului, și interacțiunea cu perifericele de control al motorului din dsPIC33 DSC. Această interfață grafică funcționează împreună cu mai multe plăci de dezvoltare pentru controlul motoarelor disponibile, pentru a susține extragerea parametrilor motorului și generarea de cod FOC pentru o gamă largă de motoare LV și HV.
Tranziția către motoarele fără perii a fost motivată de cerințele legate de o eficiență energetică ridicată și de diferențierea produselor. Un ecosistem cuprinzător de control al motoarelor oferă o abordare holistică pentru simplificarea implementării FOC fără senzori cu PMSM și ar trebui să fie alcătuit din controlere de motor dedicate, plăci de dezvoltare cu prototipare rapidă și software de dezvoltare FOC ușor de utilizat pentru automatizarea generării de coduri.
Referințe
[1]TB3220 Sensorless Field-Oriented Control of Permanent Magnet Synchronous Motor (Surface and Interior) for Appliances with Angle-Tracking Phase-Locked Loop Estimator
[2]motorBench® Development Suite
[3] Motor Control Design Resources
[4] Motor Control Library
Autor: Nelson Alexander, Senior Marketing Engineer-II
Microchip Technology | https://www.microchip.com
![]()