

 Nu este o surpriză reală faptul că Industrial Ethernet a ocupat o astfel de cotă de piață în această perioadă relativ scurtă de timp. Deși au fost aduse îmbunătățiri sistemelor bazate pe Fieldbus, acestea au încă unele limitări. Sunt ideale pentru funcționalități de control simple, dar, având în vedere că tot mai mulți producători lucrează la implementarea unei strategii Industrie 4.0, aceste limitări devin greu de depășit. Cea mai evidentă limitare este viteza, în special atunci când vorbim despre aplicații care necesită un control foarte complex și precis, cum ar fi robotica.
Nu este o surpriză reală faptul că Industrial Ethernet a ocupat o astfel de cotă de piață în această perioadă relativ scurtă de timp. Deși au fost aduse îmbunătățiri sistemelor bazate pe Fieldbus, acestea au încă unele limitări. Sunt ideale pentru funcționalități de control simple, dar, având în vedere că tot mai mulți producători lucrează la implementarea unei strategii Industrie 4.0, aceste limitări devin greu de depășit. Cea mai evidentă limitare este viteza, în special atunci când vorbim despre aplicații care necesită un control foarte complex și precis, cum ar fi robotica.
O implementare bazată pe Ethernet este o alternativă evidentă. Ethernet dispune cu ușurință de o lățime de bandă suficientă pentru a face față marii majorități a cazurilor de utilizare industrială, chiar și pentru cele mai solicitante aplicații ale Industriei 4.0. Este un standard bine înțeles, rentabil și utilizat în întreaga lume. Este flexibil și poate fi utilizat pentru multe aplicații diferite, mai ales că ramurile fieldbus mai vechi pot fi ușor și ieftin încorporate în coloana vertebrală Ethernet. Pentru implementare și întreținere, nu lipsesc inginerii care au lucrat cu tehnologia Ethernet și care o înțeleg. Industrie 4.0 necesită o legătură puternică între operațiunile industriale și IT, așa că este logic să avem sisteme de comunicații care se bazează pe același standard. Cu toate acestea, Ethernet-ul care se găsește în sistemele IT nu este determinist, iar aceasta este una dintre cele mai importante cerințe pentru sistemele de control.
Lipsa acestei cerințe a impulsionat mai mulți producători și organizații să dezvolte un standard bazat pe Ethernet care să fie adecvat pentru uz industrial. Cele mai populare dintre aceste noi standarde sunt Ethernet TSN, EtherNet/IP, PROFINET și EtherCAT. De la dezvoltarea lor inițială, fiecare dintre aceste protocoale și alte sisteme mai mici sau proprietare și-au găsit propria nișă geografică sau tehnică.
Toate protocoalele au propriile avantaje și dezavantaje. În general, acestea preiau conceptul de Ethernet, așa cum se regăsește în domeniul IT și îl adaptează pentru a asigura funcționarea în timp real. O implementare a Ethernet-ului industrial face lucrurile un pic diferit – EtherCAT (Ethernet for Control Automation Technology) păstrează stratul fizic Ethernet standard și construiește un protocol determinist complet nou deasupra. Protocolul utilizează un controler gazdă, care este singurul dispozitiv căruia i se permite să creeze frame-ul EtherCAT. Acesta are întotdeauna aceeași lungime, iar fiecare nod de dispozitiv din rețea are o zonă adresabilă a frame-ului care îi este dedicată. Pe măsură ce frame-ul “se deplasează” în cadrul rețelei, fiecare nod preia datele de control și lasă informațiile de răspuns în spațiul alocat pe măsură ce trece, fără a întârzia frame-ul mai mult decât întârzierea de propagare hardware permițând, astfel, un debit de date maxim efectiv apropiat de viteza liniei de 100Mbit/s.
În alte implementări de Ethernet industrial, verificarea frame-ului, efectuarea unei verificări CRC și trecerea prin stivă poate dura sute de microsecunde. EtherCAT este proiectat să realizeze întregul proces în numai 125µs. Această viteză mai rapidă face ca sistemul să fie mult mai receptiv, ceea ce, la rândul său, face ca întreaga aplicație de control să fie mai eficientă și mai sigură. Nodul dispozitivului EtherCAT este, de asemenea, mult mai simplu decât în cazul altor implementări Ethernet industriale, necesitând doar un cod SSC (Slave Stack Code) care rulează pe un microcontroler modest, ceea ce reduce, de asemenea, complexitatea și costul sistemului.
Cu toate acestea, implementarea EtherCAT nu este chiar cel mai ușor obiectiv de realizat. Cea mai dificilă barieră pentru proiectanți este îndeplinirea cerințelor privind timpul de ciclu. Mulți producători, în special cei care utilizează motoare, doresc să implementeze algoritmi de control la 8000 de cicluri pe secundă, ceea ce reprezintă un timp de ciclu de 125 µs. Deși sistemele EtherCAT ar trebui să atingă cu ușurință această cifră, obținerea ei în practică s-a dovedit a fi dificilă și, de obicei, necesită multă scriere și optimizare a software-ului. De asemenea, poate fi costisitor – un controler EtherCAT pe șină DIN din comerț, care să fie montat alături de un controler de motor, poate costa sute de dolari. Cu toate acestea, un design personalizat poate fi realizat pentru un preț de aproape zece ori mai mic.
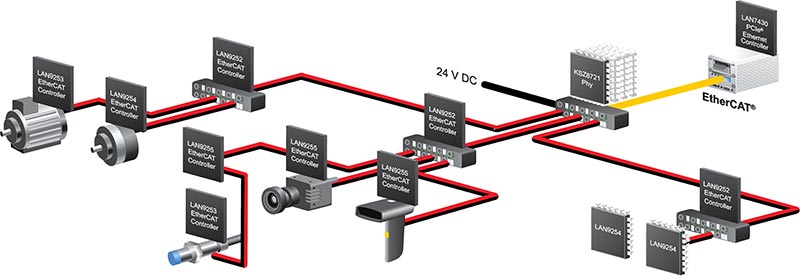
Figura 1: Sistem EtherCAT, tipic, în care sunt ilustrate rolurile pe care produsele Microchip le pot îndeplini. (© Microchip Technology)
O nouă soluție
Microchip s-a implicat în piața EtherCAT încă din 2012. Compania a debutat cu primul său controler de dispozitiv EtherCAT (ESC), LAN9252, în 2015. Această intrare pe piață s-a dovedit a fi un succes și, de asemenea, a permis companiei să strângă informații despre punctele nevralgice de pe piață. Aceasta a constatat că utilizatorii doreau o modalitate mai ușoară de a îndeplini cerințele privind timpul de ciclu și o serie de caracteristici care să le permită să adauge valoare implementărilor lor și să le ofere o mai bună înțelegere a funcționării EtherCAT.
Răspunsul din piață a dus la dezvoltarea de către Microchip a celei de-a doua generații de soluții ESC, care au fost lansate în septembrie 2020. Dispozitivele LAN9253 și LAN9254 sunt ESC-uri cu 3 porturi care dispun de două PHY-uri Ethernet integrate, echipate fiecare cu un transceiver full-duplex 100BASE-TX și funcționare la 100Mbps.
Cea mai importantă îmbunătățire pe care compania a făcut-o pentru noile ESC-uri a fost adaptarea designului pentru a permite proiectanților să atingă obiectivele de timp de ciclu cu foarte puțină optimizare software. Noile dispozitive au simplificat, de asemenea, implementarea nodurilor EtherCAT prin reducerea timpului de proiectare și a listei de materiale necesare (BoM). Implementările EtherCAT obișnuite utilizează un ESC, un microcontroler și un EEPROM, acesta din urmă găzduind configurația pentru ESC. Microchip a dezvoltat o tehnică prin care emulează eficient EEPROM-ul. ESC utilizează o funcție de apelare pentru a obține instrucțiuni direct de la microcontrolerul gazdă, fără a afecta performanța, ceea ce face ca EEPROM-ul fizic să nu fie necesar.
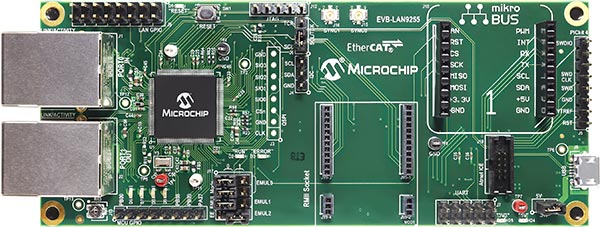
Figura 2: Placa de evaluare LAN9255 (EVB-LAN9255) permite inginerilor să dezvolte proiecte utilizând un microcontroler Cortex M4F cu controler de dispozitiv EtherCAT integrat. (© Microchip Technology)
Noile circuite integrate au fost proiectate, de asemenea, cu o funcție care reduce cantitatea de cristale necesare pentru sincronizare. Multe proiecte industriale folosesc controlere multi-axă pentru aplicații precum robotica. Aceste proiecte pot necesita până la șase controlere diferite pentru a opera un braț de robot cu mai multe axe. Anterior, fiecare dintre aceste circuite necesita propriul cristal pentru sincronizare. Acum, noile circuite includ o metodă de replicare precisă a sistemului de sincronizare și un atenuator de jitter pentru cele șase circuite folosind un singur cristal, eliminând astfel necesitatea a cinci cristale suplimentare și reducând și mai mult costul sistemului.
Cele două dispozitive oferă și alte caracteristici care facilitează implementarea și operarea sistemelor EtherCAT. Protocolul EtherCAT a fost proiectat fără diagnosticare la nivelul fizic, astfel încât utilizatorii află despre defecțiuni, cum ar fi degradarea cablului, doar atunci când încep să primească erori CRC și alte probleme. Microchip a proiectat capabilitatea de a monitoriza starea cablurilor în orice moment, permițând utilizatorilor să vadă defecțiunile înainte ca acestea să devină o problemă – un principiu cheie al Industriei 4.0.
LAN9253 este găzduit într-o capsulă QFN, replicând pe cât posibil pin-out-ul capsulei LAN9252 pentru a permite clienților să profite de îmbunătățirile pe care le oferă acest design cu o reproiectare minimă. LAN9254 are 16 pini I/O suplimentari care permit ESC-ului să funcționeze ca un simplu controler fără a fi nevoie de un microcontroler. Deoarece se cunoaște zona din frame pe care o utilizează nodul dispozitivului și întârzierea de propagare, biții din ESC pot fi mapați la decalajele din frame și la cele 32 de linii I/O pentru a permite conectarea directă a echipamentelor din teren la rețeaua EtherCAT.
Mulți clienți au solicitat să includem un controler pentru a oferi o soluție ESC completă. În acest an, Microchip a lansat LAN9255 care adaugă un microcontroler Cortex-M4F. Microcontrolerul are suficientă viteză pentru a se ocupa de cerințele EtherCAT, acționând în același timp ca procesor de aplicații pentru sistemul de control. Unitatea în virgulă mobilă a procesorului ajută la algoritmi mai complecși, cum ar fi cei necesari pentru controlul motoarelor. De asemenea, au fost adăugate prize Ethernet care suportă cod pentru SNMP versiunea 3, pentru a permite proiectanților mai multă flexibilitate atunci când conectează tehnologia operațională la sistemele IT.
Concluzie
LAN9253 și LAN9254 de la Microchip au facilitat mult implementarea și întreținerea nodurilor EtherCAT, reducând timpul și costurile prin eliminarea necesității unor componente suplimentare, ușurând procesul de optimizare a software-ului și adăugând capabilitatea de a analiza rețeaua. Noul circuit integrat LAN9255 duce această tendință cu un pas mai departe, eliminând necesitatea unui controler gazdă extern și oferind dezvoltatorilor o soluție de nod EtherCAT și de control pe teren într-o singură capsulă. Utilizarea mediului Microchip MPLAB X Harmony Framework accelerează și mai mult timpul de lansare pe piață, permițând scrierea și optimizarea software-ului atât pentru comunicație, cât și pentru control într-un singur mediu de utilizare ușor de utilizat.
Toate dispozitivele discutate în acest articol sunt disponibile acum – livrate în volume de producție și susținute de serviciile Microchip de verificare tehnică a proiectării.

Autor: Ian Saturley,
Strategic Marketing Manager, USB & Networking Group
Microchip Technology | https://www.microchip.com
![]()