

Selectarea unui filtru trece-jos (anti-aliasing) pentru un sistem de achiziţie de date nu este chiar aşa de uşoară. La prima vedere, ar părea că este doar o chestiune de a selecta pragul de frecvenţă necesar al filtrului, dar în lumea reală nu este posibil să creezi un filtru analogic care să poată fi capabil de tranziţii instantanee de la un câştig unitar la amplificare zero. Ca rezultat, se realizează o apropiere a circuitului de filtrare de frecvenţa care trebuie rejectată prin proiectarea lărgimii de bandă a filtrului şi a ordinului filtrului (numărul de poli). Acest articol va explora tehnicile care pot fi folosite pentru a defini numărul de poli ai filtrului, tipuri de aproximări şi câteva topologii de circuite.
Chiar am nevoie de un filtru în circuitul meu?
În sistemele de achiziţie de date, un filtru trece-jos este utilizat (imediat) înaintea convertorului A/D pentru a reduce zgomotul de înaltă frecvenţă. Există două idei greşite în ceea ce priveşte necesitatea utilizării filtrelor trece-jos din sistemele de achiziţie de date. Prima greşeală apare atunci când se consideră că nu este necesar un filtru de netezire atunci când sunt convertite semnale de curent continuu sau de joasă frecvenţă. Se consideră că atunci când se lucrează cu semnale de joasă frecvenţă nu există zgomot şi ca urmare proiectanţii decid că filtrele trece-jos nu sunt necesare în acest caz.

Puteţi crede că dispuneţi de un sistem care lucrează la frecvenţe joase, dar dispozitivele analogice pasive sau active injectează zgomot de înaltă frecvenţă pe calea semnalului. Un dispozitiv pasiv – foarte comun – generator de zgomot este un rezistor. Orice rezistor generează propriul său zgomot termic de tensiune. Acest zgomot este generat cu sau fără o excitaţie de tensiune sau de curent. Amplitudinea acestui zgomot este constantă de-a lungul spectrului de frecvenţă până la frecvenţa la care capacitatea parazită (~0.5pF) a rezistorului atenuează zgomotul.
Valoarea acestui zgomot este egală cu:
V(zgomotul rezistorului, rms) = Ö (4KTR(BW))
unde: K este constanta lui Boltzsmann şi este egală cu 1.38×10-23JK-1
T este temperatura exprimată în grade Kelvin
R este rezistenţa exprimată în ohm
(BW) este lărgimea de bandă a frecvenţei exprimată în Hertz
Amplificatorul operaţional este un dispozitiv activ care generează zgomot intern. Zgomotul unui amplificator este generat în faţa perechii diferenţiale de intrare. La frecvenţe joase, acest zgomot este mai mare decât la frecvenţe înalte aşa cum se observă şi în figura 1. În plus, zgomotul este generat în alte dispozitive active incluzând aici operarea în comutaţie din interiorul surselor de putere. În final trebuie menţionat că zgomotul provenit de la semnalele externe poate fi injectat pe calea semnalului.
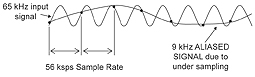
A doua neînţelegere este aceea că etajul de intrare al convertorului A/D va filtra semnalele deasupra frecvenţei de eşantionare sau că frecvenţa de eşantionare limitează banda de frecvenţă care este convertită. Ambele puncte de vedere nu sunt corecte. Convertorul A/D este un sistem de eşantionare care va lua un eşantion de semnal de oriunde din conţinutul de frecvenţă. Colecţia acestor eşantioane oferite de convertor de-a lungul timpului va oferi o reprezentare digitală a semnalului în domeniul de frecvenţă ½ din frecvenţa de eşantionare. Procedeul este cunoscut sub numele de netezire (aliasing). Acest fenomen este ilustrat în figura 2.
În concluzie, dacă proiectaţi un sistem care include un convertor A/D, trebuie să folosiţi un filtru trece-jos în faţa convertorului. Acest lucru nu este negociabil. Dacă aceste semnale nedorite se află în calea semnalului în momentul în care convertorul A/D formează un eşantion, acestea vor fi convertite şi introduse în semnalul digital de ieşire. În acest punct va fi imposibil să facem diferenţa între semnalele bune şi cele proaste din codul digital.
Câţi poli sunt de ajuns?

Dacă apare necesitatea de a îndepărta frecveţele înalte din semnal, cea mai bună soluţie ar fi utilizarea unui filtru “brick-wall”. Aşa cum am discutat ceva mai devreme, nu este fezabil să proiectezi filtre foarte pretenţioase. De exemplu, filtrul “brick-wall” este extrem de instabil şi în acelaşi timp foarte scump de implementat. Câteva dintre topologiile standard de filtre vor fi prezentate mai târziu în cadrul acestui articol, dar este util să cunoaşteţi că un filtru activ trece-jos de ordinul al 2-lea necesită un amplificator operaţional, două condensatoare şi minim doi rezistori. Răspunsul în frecvenţă al unui filtru de ordinul 2 în comparaţie cu cel al unui filtru standard de frecvenţă este ilustrat în figura 3. Filtrul cu cel mai mare ordin prezentat în figura 3 este un filtru de ordinul 32. Acesta are performanţe foarte apropiate de cele ale filtrului “brick-wall”, dar este încă foarte dificil de implementat o soluţie stabilă care are nevoie de 16 amplificatoare operaţionale, 32 de condensatoare şi cel puţin 32 de rezistori.
Ordinul filtrului trebuie să fie determinat de condiţiile aplicaţiei dumneavoastră. Cele trei variabile de care trebuie să ţineţi cont sunt frecvenţa maximă a semnalului, nivelul amplitudinii zgomotului pe care vă aşteptaţi să îl atingă şi mărimea celui mai puţin semnificativ bit (LSB) al convertorului dumneavoastră. În final, frecvenţa de eşantionare a convertorului A/D trebuie să fie ajustată astfel încât să corespundă cerinţelor sistemului.
Frecvenţa maximă a semnalului este definită de necesităţile aplicaţiei dumneavoastră. Când convertiţi semnale sub câţiva hertz (sau de curent continuu) puteţi muta pragul frecvenţei al filtrului dumneavoastră foarte jos. Acest lucru va îmbunătăţi acurateţea sistemului deoarece eliminaţi zgomotul din calea semnalului. În alte cazuri, semnalul ce trece prin calea analogică poate atinge valori de nivelul ordinul kHz-lor sau MHz-lor.
O dată ce aţi determinat frecvenţa maximă a semnalului, trebuie să fie definită magnitudinea zgomotului din afara benzii. Amplitudinea acestui zgomot se poate situa în zona microvolţi/ milivolţi sau, poate avea acelaşi nivel ca al oscilaţiei vârf-la-vârf din traseul analogic. De exemplu, combinaţia dintre zgomotul rezistiv şi zgomotul unui amplificator din etajul de amplificare al unui instrument de măsură cu un câştig de +200V/V poate atinge nivelul de câteva sute de milivolţi (vârf-la-vârf).
În fine, trebuie definită mărimea celui mai puţin semnificativ bit (LSB) al convertorului A/D. O proiectare bună şi fiabilă va atenua zgomotul la o valoare de cel puţin ¼ ori din mărimea LSB-ului la jumătate din frecvenţa de eşantionare a convertorului. Dacă totuşi, nivelul zgomotului măsurat se menţine la o valoare destul de înaltă, atunci trebuie mărit ordinul filtrului sau pragul de frecvenţă al filtrului trebuie coborât.
O dată ce aceste probleme au fost evaluate şi înţelese, va trebui să determinaţi ordinul filtrului dumneavoastră. Dacă convertorul A/D al aplicaţiei dumneavoastră are o topologie SAR (Successive Approximation Register – registru cu aproximări succesive), regula generală în sistemele de achiziţie de date este de a alege un filtru de ordinul 4, 5 sau 6. Dacă folosiţi un convertor delta-sigma şi un R/C, un filtru cu un singur pol va fi de ajuns. Uzual, la aceste tipuri de dispozitive, fabricanţii vor furniza în datele lor de catalog table cu valori ale rezistorilor şi condensatoarelor.
Ce tip de aproximare se potriveşte cel mai bine în cazul aplicaţiei mele?
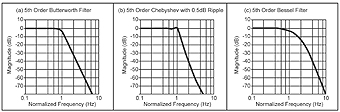
Cele mai populare tipuri de aproximări ale filtrelor sunt Butterworth, Bessel, şi Cebîşev. Fiecare tip de filtru poate fi identificat prin caracteristicile prezentate în figurile 4 şi 5. Alte tipuri de aproximări ale filtrelor care nu au fost discutate în acest articol sunt Cebîşev Inversă, Elliptic şi Cauer.
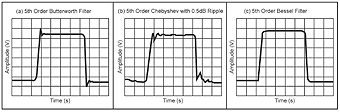
Filtrul Butterworth este de departe cel mai popular filtru utilizat în circuitele electronice. Aşa cum se vede în figura 4a, comportamentul frecvenţei are o amplitudine maximă plată în banda de trecere. Rata de atenuare în banda de tranziţie este mai bună decât a filtrului Bessel, dar nu la fel de bună precum cea a filtrului Cebîşev. Nu există nici o oscilaţie tranzitorie amortizată în banda de oprire. Răspunsul tranzitoriu al filtrului Butterworth este ilustrat în figura 5a. Acest tip de filtru are câteva oscilaţii în domeniul timp, dar mult mai mici decât cele ale filtrului Cebîşev.
Cu filtrul trece-jos Cebîşev, rata de atenuare în banda de tranziţie este mai abruptă decât în cazul filtrelor Butterworth şi Bessel (figura 4b). De exemplu, răspunsul unui filtru Butterworth de ordinul 5 va fi asemănător în banda de tranziţie cu cel al unui filtru Cebîşev de ordinul 3. Deşi există oscilaţii în regiunea benzii de trecere la acest filtru, banda de oprire va fi lipsită de oscilaţii. Răspunsul tranzitoriu (figura 5b.) prezintă câteva oscilaţii.
Filtrul Bessel are un răspuns în amplitudine plat în banda de trecere (figura 4c). Urmând banda de trecere, rata atenuării în banda de tranziţie este mai lentă decât la filtrele Butterworth sau Cebîşev. În final, nu există oscilaţii în banda de stop. Acest filtru are cel mai bun răspuns tranzitoriu faţă de toate filtrele menţionate mai sus, prezentând oscilaţii foarte mici (figura 5c.).
Topologii de circuite analogice
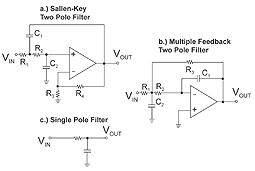
Aceste filtre pot fi implementate cu topologii de amplificator precum circuitele prezentate în figura 6. Filtrul Sallen-Key cu doi poli şi tensiune controlată (figura 6a) este cel mai cunoscut filtru. Cu acest filtru, câştigul în curent continuu este pozitiv. În filtrul Sallen-Key câştigul în curent continuu poate fi mai mare de unu. Ordinul acestui filtru este egal cu 2. Polii acestor filtre sunt determinaţi de valorile rezistive şi capacitive ale R1, R2, C1 şi C2.
Filtrul prezentat în figura 6b este un filtru trece-jos cu doi poli cu reacţie multiplă de ordinul al 2lea. Câştigul în curent continuu al acestui filtru inversează semnalul şi este egal cu raportul dintre R1 şi R2. Polii sunt determinaţi de valorile rezistenţelor R1, R3, şi condensatoarelor C1, şi C2. Exemple de realizare de filtre active cu un singur pol sunt prezentate în figurile 6c şi 6d. Aceste filtre pot fi montate în paralel pentru a putea implementa un filtru cu un ordin mai mare. De exemplu, filtrul cu un singur pol urmat de două filtre Sallen-Key crează un filtru de ordinul 5.
Ecuaţiile acestor filtre sunt disponibile în diverse materiale de documentare (date de catalog, cărţi etc.). Aceste filtre pot fi de asemenea proiectate cu uşurinţă cu unelte precum FilterLab® – o unealtă software de filtrare analogică de la Microchip Technology. Acest program de filtrare ilustrează răspunsul în frecvenţă al filtrului dorit de dumneavoastră, oferă o schemă a circuitului ce poate fi implementată în laboratorul dumneavoastră şi poate genera un macromodel SPICE pentru simulările pe care doriţi se le efectuaţi.
Concluzii
Filtrarea analogică reprezintă o porţiune critică a sistemelor de achiziţie a datelor. Dacă nu este utilizat un filtru analogic, convertoarele A/D pot introduce în calea semnalului diverse frecvenţe parazite. O dată ce un semnal este netezit în procesul de digitizare, devine imposibilă diferenţierea între zgomot cu frecvenţe în bandă sau în afara benzii. În acest articol am examinat tehnicile pe care le puteţi utiliza pentru a defini numărul de poli ai filtrului trece-jos din aplicaţia dumneavoastră, tipurile de aproximări şi câteva topologii de circuite.
Numele Microchip, logo-ul şi FilterLab sunt mărci înregistrate ale companiei Microchip Technology Incorporated în U.S.A. şi în alte ţări.
de Bonnie C. Baker, Microchip Technology Inc.