

 Acest articol evidențiază importanța unității IMU (Inertial Measurement Unit) pentru localizare în aplicații robotice și subliniază beneficiile sale cheie. IMU au devenit o parte esențială și integrală a poziționării precise a roboților prin furnizarea de date esențiale privind mișcarea. Acestea integrează accelerometre, giroscoape și magnetometre, permițând roboților să își determine cu exactitate orientarea, poziția și mișcarea, oferind o reacție în timp real, permițându-le astfel să navigheze într-un mediu în schimbare dinamică. Tehnicile de fuziune a senzorilor combină datele IMU cu alți senzori, cum ar fi camerele sau senzorii LIDAR, pentru a spori precizia localizării prin încorporarea mai multor surse de date. Unitățile IMU sunt utilizate pe scară largă în robotica mobilă, robotica umanoidă, vehiculele aeriene fără pilot (UAV) și realitatea virtuală/augmentată. Rolul lor în realizarea unei localizări precise permite roboților să îndeplinească autonom sarcini complexe și să interacționeze eficient cu mediul înconjurător. Articolul explorează cazurile de utilizare a unităților IMU în mediile dificile în care operează AMR-urile și modul în care unitățile IMU joacă un rol esențial în realizarea unei localizări precise.
Acest articol evidențiază importanța unității IMU (Inertial Measurement Unit) pentru localizare în aplicații robotice și subliniază beneficiile sale cheie. IMU au devenit o parte esențială și integrală a poziționării precise a roboților prin furnizarea de date esențiale privind mișcarea. Acestea integrează accelerometre, giroscoape și magnetometre, permițând roboților să își determine cu exactitate orientarea, poziția și mișcarea, oferind o reacție în timp real, permițându-le astfel să navigheze într-un mediu în schimbare dinamică. Tehnicile de fuziune a senzorilor combină datele IMU cu alți senzori, cum ar fi camerele sau senzorii LIDAR, pentru a spori precizia localizării prin încorporarea mai multor surse de date. Unitățile IMU sunt utilizate pe scară largă în robotica mobilă, robotica umanoidă, vehiculele aeriene fără pilot (UAV) și realitatea virtuală/augmentată. Rolul lor în realizarea unei localizări precise permite roboților să îndeplinească autonom sarcini complexe și să interacționeze eficient cu mediul înconjurător. Articolul explorează cazurile de utilizare a unităților IMU în mediile dificile în care operează AMR-urile și modul în care unitățile IMU joacă un rol esențial în realizarea unei localizări precise.
Introducere
Roboții mobili autonomi (AMR) sunt esențiali pentru fabricile și depozitele inteligente ale viitorului, jucând un rol esențial în modelarea fabricilor automatizate, sustenabile și mai curate care vor exista în viitor. AMR-urile sporesc eficiența, reduc deșeurile și optimizează utilizarea în mediile industriale. În timp ce fabricile viitorului ar putea fi construite și optimizate special pentru funcționarea AMR-urilor, integrarea acestor roboți în depozitele și fabricile existente prezintă provocări. Principalul obstacol pentru AMR-uri implică două componente esențiale: planificarea eficientă a traseului (determinarea traseului optim) și localizarea precisă (actualizarea continuă a poziției în mediul său).1
Articolul se axează pe navigația din interior, în medii închise, fără GPS. AMR-urile utilizează o serie de senzori și algoritmi pentru localizare și navigație. Aceștia includ senzori vizuali, cum ar fi camere, LIDAR și radar, precum și senzori odometrici, cum ar fi codificatoare rotative și IMU. Fiecare tip de senzor oferă avantaje unice în ceea ce privește raza de acțiune, precizia și informațiile senzoriale. Combinația acestor senzori asigură date complete pentru localizarea eficientă a robotului în medii dinamice. Deși pentru o autonomie completă este necesară o gamă largă de senzori, acest articol evidențiază cazurile de utilizare și provocările mediului în care operează AMR-urile și modul în care IMU-urile ajută la o localizare precisă, care este esențială pentru navigație și autonomie.
Ce este o unitate IMU?
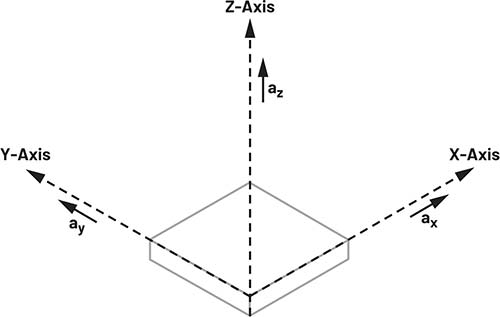
Figura 1: Măsurarea accelerației pe axele x, y și z. (Sursă imagine: ADI)
Unitățile IMU sunt dispozitive miniaturale realizate din dispozitive MEMS (sisteme microelectromecanice). Ele constau, de obicei, din următoarele elemente:
- Accelerometru triaxial: Accelerometrele măsoară accelerația în raport cu câmpul gravitațional al Pământului. Într-o unitate IMU, accelerometrele triaxiale sunt utilizate pentru a măsura accelerația pe axele x, y și z (figura 1).
- Giroscop triaxial: Giroscoapele măsoară viteza de rotație furnizând viteza unghiulară pe fiecare dintre cele trei axe. Giroscopul triaxial permite măsurarea vitezei unghiulare a robotului (ωx, ωy, ωz) de-a lungul axelor x, y și z (figura 2).
-
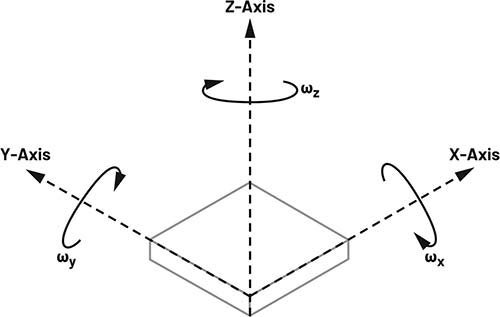
Figura 2: Măsurarea vitezei unghiulare pe axele x, y și z. (Sursă imagine: ADI)
Magnetometru de înaltă performanță: Acesta furnizează măsurători ale câmpului magnetic, esențiale pentru estimarea precisă a orientării în medii dificile. Deși nu este foarte răspândit, un magnetometru este disponibil pe unele IMU-uri mai vechi.
- Altele: Un senzor de temperatură pentru a compensa variațiile de temperatură și un barometru pentru a măsura presiunea.
Diagrama bloc a unei unități IMU
- O unitate IMU tipică include nu numai giroscoape, accelerometre și un senzor de temperatură, ci și conversia analog-digitală pentru extragerea măsurătorilor și compensarea temperaturii (figura 3).
- O unitate IMU dispune de algoritmi de filtrare preliminară, de exemplu FIR (răspuns finit la impuls).
-
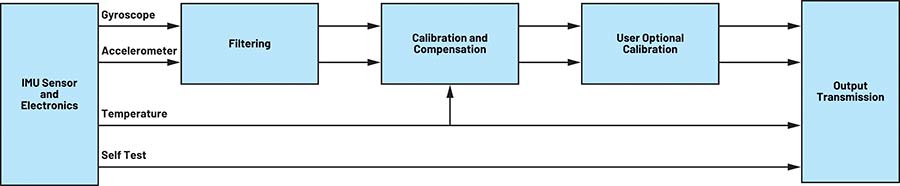
Figura 3: Blocul funcțional al unei unități IMU. (Sursă imagine: ADI)
Calibrarea și compensarea corectează orice nealiniere sau abatere a senzorilor.
- Utilizatorul are opțiunea de a ajusta unghiul de rotație (dƟ) al modulului IMU, astfel încât axa sa internă să se alinieze cu cadrul de referință al robotului înainte de transmiterea datelor finale.
De ce sunt unitățile IMU benefice pentru AMR-uri?
- Localizare în timp real cu rate mari de actualizare: Autonomia și navigarea în timp real sunt elemente esențiale în mediul operațional al unui robot. Cu toate acestea, senzorii de percepție operează, de obicei, cu o rată de actualizare limitată, de la aproximativ 10 Hz la 30 Hz. În schimb, IMU-urile sunt capabile să furnizeze informații de înaltă fidelitate privind poziția, care ajung până la 200 Hz. Această rată de actualizare mai mare sporește considerabil fiabilitatea sistemului în adaptarea promptă la schimbările rapide de orientare într-un mediu dinamic, facilitând reacții imediate. Rata de actualizare accelerată permite, de asemenea, AMR-urilor să ofere o estimare a poziției în timpul intervalelor scurte dintre alte măsurători. Ca urmare, IMU-urile joacă un rol esențial în obținerea localizării în timp real, depășind senzorii de percepție cu rate de actualizare de 10× mai rapide.
- Dead reckoning: IMU-urile constituie coloana vertebrală a tehnologiei Dead Reckoning, o tehnică de navigație prin care se estimează poziția curentă pe baza unei poziții cunoscute anterior. Furnizând în permanență date privind poziția, orientarea și viteza de-a lungul timpului scurs, IMU-urile permit estimări precise, contribuind la o navigație fiabilă pentru AMR-uri.
- Dimensiuni compacte și greutate redusă: Dimensiunile compacte și designul ușor al IMU-urilor le permit să se integreze în diverse configurații de roboți mobili. De exemplu, ADIS16500 de la Analog Devices, cu o amprentă de numai 33,25 mm × 30,75 mm, asigură o amplasare eficientă fără a compromite manevrabilitatea robotului.
- Robustețe în medii diverse: Unitățile IMU sunt relativ rezistente la interferențele electromagnetice și pot opera într-o varietate de medii, inclusiv în spații exterioare și interioare. Acest lucru le face potrivite pentru o gamă largă de aplicații.
- Fiabilitate sporită prin rate de actualizare accelerate: Având în vedere că senzorii de percepție sunt limitați, în general, la rate de actualizare de ~10 Hz până la 30 Hz, IMU-urile se remarcă prin furnizarea unor date poziționale de înaltă fidelitate, cu o frecvență a datelor brute (raw data) de până la 4 kHz. Această rată crescută de actualizare sporește fiabilitatea, în special în medii dinamice, permițând AMR-urilor să răspundă rapid și să ajute la estimarea poziției în timpul intervalelor scurte dintre alte măsurători.
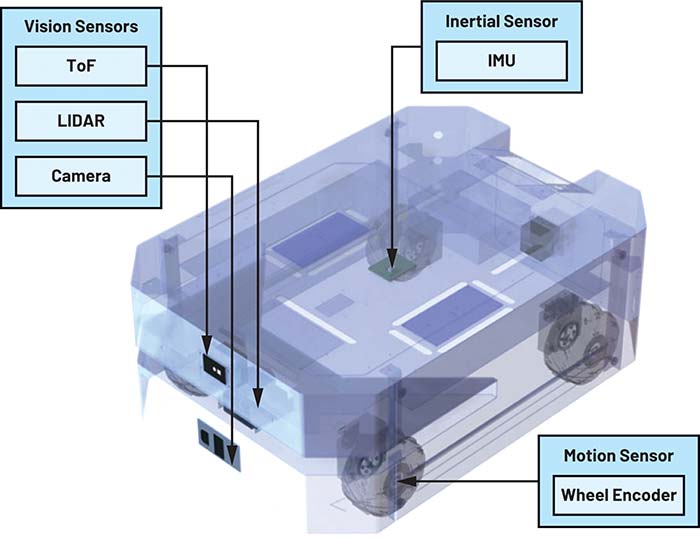
Figura 4: Ansamblul de senzori al unui AMR. (Sursă imagine: ADI)
De ce sunt esențiale unitățile IMU pentru AMR-uri în ciuda disponibilității senzorilor de viziune
Un AMR, așa cum este ilustrat în figura 4, dispune, în general, de o varietate de senzori vizuali, cum ar fi ToF (time of flight), cameră, LIDAR etc. În ciuda setului bogat de date furnizate de odometria vizuală, persistă nevoia utilizării senzorilor IMU. Scenariile următoare explorează câteva dintre aceste motive:
- AMR navigând pe un coridor cu puține caracteristici: Algoritmii de localizare și cartografiere simultană (SLAM) funcționează, în esență, prin potrivirea datelor provenite de la senzori, care sunt stocate în hartă, pentru a permite localizarea în interiorul hărții. Atunci când un AMR se deplasează pe un coridor lung (figura 5), acesta își va pierde rapid poziția. Din cauza lipsei caracteristicilor distinctive, cum ar fi pereții drepți care au o culoare, o textură sau o reflexie uniformă, SLAM are dificultăți în efectuarea unei localizări precise. În acest caz, IMU-urile acționează ca un sistem de ghidare valoros prin furnizarea de informații privind direcția și orientarea.
-
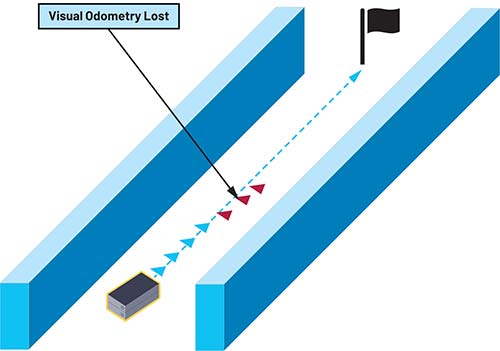
Figura 5: AMR-ul își pierde odometria vizuală pe un coridor fără caracteristici. (Sursă imagine: ADI)
Navigarea prin medii deschise largi: Limitări ale razei de acțiune: Atunci când operează într-un spațiu deschis de mari dimensiuni, cum ar fi un depozit imens (de exemplu, 50 m × 50 m), AMR-urile întâmpină dificultăți de localizare, deoarece caracteristicile specifice se extind dincolo de raza de acțiune a senzorilor (raza maximă de acțiune a senzorilor LIDAR este, de obicei, de aproximativ 10 m până la 15 m). După cum se observă în figura 6, odometria AMR a fost deja pierdută din cauza dimensiunilor mari ale spațiului. În plus, depozitele prezintă, adesea, caracteristici uniforme, ceea ce face dificilă utilizarea senzorilor vizuali. În astfel de scenarii, unitățile IMU și codificatoarele rotative sunt singurele surse fiabile pentru o localizare precisă.
-
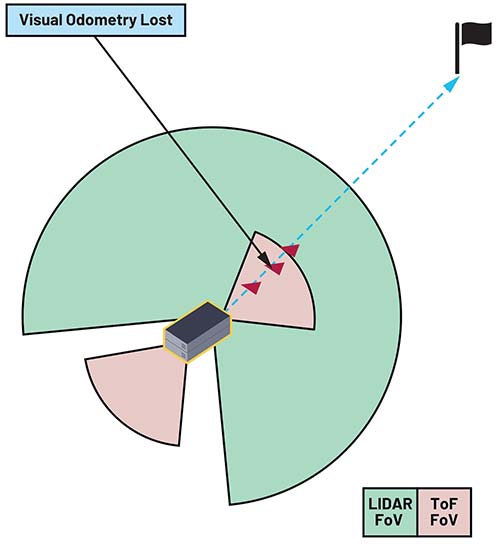
Figura 6: Datorită câmpului vizual limitat (FoV) al senzorilor, AMR-ul nu poate localiza într-un spațiu deschis de mari dimensiuni. (Sursă imagine: ADI)
Navigarea pe o pantă: Atunci când se manevrează pe o pantă, algoritmul SLAM tradițional întâmpină o provocare atunci când se bazează pe LIDAR, deoarece datele 2D nu prezintă informații despre gradient. În consecință, pantele sunt interpretate greșit ca pereți sau obstacole, ceea ce are ca efect realizarea unor hărți cu costuri mai ridicate. Ca urmare, abordările SLAM convenționale cu sisteme 2D devin ineficiente în zonele în pantă. IMU-urile rezolvă această problemă prin extragerea informațiilor despre gradient (figura 7) pentru a negocia eficient navigarea pe o pantă.
- Factori de mediu în timpul navigării: Sensibilitate la factorii de mediu: Senzorii LIDAR pot fi sensibili la diverși factori de mediu, cum ar fi lumina ambientală, praful, ceața și ploaia. Acești factori pot degrada calitatea datelor senzorului și, la rândul lor, pot afecta performanța algoritmului SLAM. Similar, alte tipuri de senzori sunt afectate de suprafețele reflectorizante și de obiectele dinamice în mișcare (alte AMR-uri sau lucrători), ceea ce sporește confuzia în SLAM. Tabelul 1 rezumă maniera în care mediul afectează diferitele modele de senzori. IMU-urile pot opera fiabil într-o varietate de medii, ceea ce le face o alegere versatilă pentru roboții mobili.
| Tabelul 1. Estimarea poziției și a orientării în funcție de senzorii utilizați pentru localizare | ||||
| Tipul de senzor | Afectat de lumina slabă | Afectat de mișcări dinamice | Afectat de suprafețe reflectorizante | Dependent de geometria complexă a mediului |
| Cameră RGB standard | Da | Da | Nu | Nu |
| Time of Flight | Nu | Da | Da | Da |
| LIDAR | Nu | Da | Da | Da |
| Radar | Nu | Da | Da | Da |
| Odometru | Nu | Nu | Nu | Nu |
| IMU | Nu | Nu | Nu | Nu |
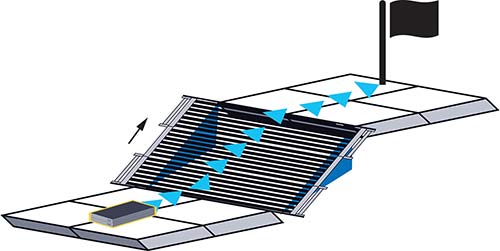
Figura 7: Deplasarea unui AMR pe o pantă. (Sursă imagine: ADI)
Niciun senzor nu este perfect!
Deși senzorii IMU prezintă avantaje, există riscuri și provocări 2:
- Zgomot: măsurătorile IMU sunt afectate de zgomot, care poate degrada precizia navigației și controlul robotului. Pentru a compensa zgomotul, IMU utilizează adesea tehnici avansate de filtrare, cum ar fi filtrarea Kalman sau FIR.
- Abatere: senzorii IMU acumulează abateri în timp, ceea ce poate duce la erori în estimarea orientării și a mișcării. Pentru a rezolva această problemă, se utilizează algoritmi de estimare a abaterilor pentru a actualiza continuu citirile senzorilor IMU.
- Neliniaritate: Senzorii IMU prezintă un comportament neliniar, care poate complica și mai mult procesarea și interpretarea datelor. Pentru a compensa neliniaritatea, aceștia trebuie să fie calibrați pentru a caracteriza comportamentul senzorului și a aplica corecțiile corespunzătoare.
- Deplasare aleatorie: Unitățile IMU sunt susceptibile la evenimente termomecanice externe care cauzează erori în ARW (angle random walk) (în cazul giroscopului) și VRW (velocity random walk) (în cazul accelerometrului).
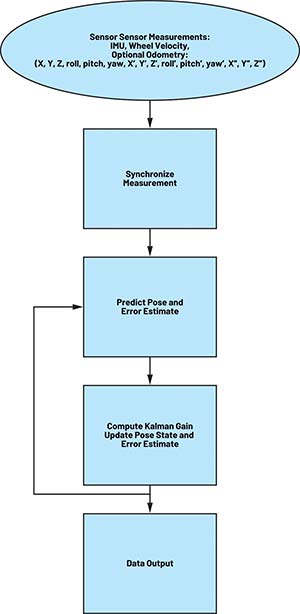
Figura 8: Algoritm EKF (simplificat). (Sursă imagine: ADI)
Cum reducem aceste riscuri? Răspunsul este prin fuziune de senzori!
- Cum ajută fuziunea senzorilor?
- Crește fiabilitatea.
- Creșterea calității datelor.
- O estimare mai bună a stărilor nemăsurate.
- Crește acoperirea, asigurând, astfel, siguranța.
- Importanța algoritmului de fuziune a senzorilor:
- Tehnicile de estimare a stării, cum ar fi filtrarea Kalman extinsă, pot corecta erorile de zgomot, ARW și de abatere în timpul unei operări regulate a AMR-urilor.
- Erorile giroscopului de înclinare și rotire pot fi eliminate în cadrul unei unități IMU prin măsurarea accelerației generate de gravitația Pământului.
- Algoritmul urmărește și corectează abaterile constante (bias drift) în măsurătorile senzorilor și corectează eroarea ARW.
- Filtru Kalman extins (EKF):
- Permite estimarea stărilor trecute, prezente și viitoare chiar și atunci când natura exactă a sistemului modelat este necunoscută. Figura 8 prezintă un algoritm EKF simplificat.
- Se observă, în timp, măsurători care conțin zgomot alb gaussian sau alte inexactități și se estimează valorile reale ale măsurătorilor prin:
-
-
- Sincronizarea măsurătorilor între senzori
- Anticiparea poziției și estimarea erorii
- Estimarea și actualizarea incertitudinii valorii prezise (anticipate)
-
- Fuziune de senzori:
- Într-un sistem tipic de operare pentru roboți (ROS), senzorii de viziune împreună cu senzorii IMU și cei odometrici (figura 9) sunt fuzionați utilizând un pachet ROS open-source foarte răspândit – robot_localization3 – care utilizează în nucleul său algoritmul EKF. Acest pachet permite fuziunea unui număr nelimitat de senzori și a diferitelor intrări ale senzorilor, cum ar fi date de la IMU, viteza roților și odometrie. Rezultatul obținut prin robot_localization include estimări 3D ale poziției și orientării robotului, precum și ale vitezei liniare/unghiulare și accelerației, care sunt introduse în algoritmul SLAM. Starea poziției este exprimată astfel:
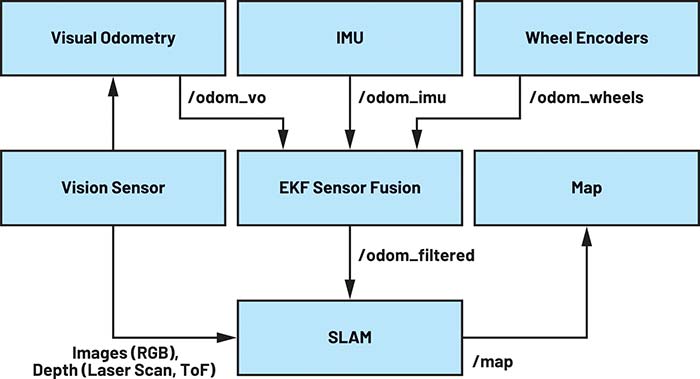
Figura 9: Sistem tipic de fuziune a senzorilor care utilizează ROS. (Sursă imagine: ADI)
Starea poziției = (X, Y, Z (coordonatele poziției), roll, pitch, yaw (unghiuri de rotație în spațiu), X˙, Y˙, Z˙ (viteze liniare în direcțiile respective), roll˙, pitch˙, yaw˙ (viteze unghiulare), X¨, Y¨, Z¨(accelerații în direcțiile respective)).
Cum contribuie utilizarea unei unități IMU de la ADI la rezolvarea acestor provocări?
Analog Devices produce o gamă variată de unități IMU destinate unor aplicații diverse, inclusiv roboți mobili. Iată câteva dintre avantajele extraordinare oferite de acestea:
- Calibrare integrată: Unitățile IMU de la ADI au un accelerometru și un giroscop calibrate complet din fabrică abordând parametri precum sensibilitatea, abaterea, alinierea, deviația giroscopului la accelerație liniară și accelerația. Corecțiile de offset dinamic integrate compensează variațiile tensiunii de alimentare, ale temperaturii și interferențele magnetice, împreună cu capabilitățile de reducere a zgomotului.4 Acest lucru permite o reducere semnificativă a timpului de integrare a sistemului și a costului de achiziție, simplificând implementarea în ansamblu a măsurătorilor de precizie ale senzorilor în aplicații industriale aflate în diverse condiții.
- Convertoare analog-digitale (ADC) cu zgomot redus și lățime de bandă mare: Captează datele senzorului cu precizie ridicată și lățime de bandă mare, asigurând o operare fiabilă și cu răspuns rapid.
- Precizie ridicată: Unitățile IMU de la ADI oferă măsurători precise ale orientării, mișcării și vitezei, permițând roboților să ia decizii în cunoștință de cauză și să navigheze în mediul înconjurător cu precizie.
- Consum redus de putere: Roboții mobili operează, de regulă, folosind baterii, astfel încât un consum redus de energie este esențial pentru extinderea razei lor de acțiune. Unitățile IMU de la ADI sunt foarte eficiente, minimizând consumul de energie și maximizând durata de viață a bateriei.
- Dimensiuni compacte: Pentru a se încadra în constrângerile de spațiu limitate ale roboților mobili, IMU-urile ADI sunt proiectate cu factori de formă compacți. Acest lucru permite integrarea ușoară în diverse configurații de roboți, fără a compromite performanța.
- Integrare ușoară: Pentru o operare fără sincope, integrarea ușoară în sistemul de control al robotului este esențială. Plăcile de dezvoltare ale ADI pentru unitățile IMU, combinate cu nodurile ROS open-source, permit o integrare ușoară în procesul de construire a AMR-urilor.
Concluzie
IMU-urile sunt o necesitate în ceea ce privește localizarea pentru AMR-uri, deoarece acestea furnizează estimări ale orientării și urmărirea mișcării și oferă un răspuns în timp real cu rate de actualizare ridicate pentru a permite AMR-urilor să navigheze în medii dinamice. Tehnicile de fuziune a senzorilor, cum ar fi filtrul Kalman, permit combinarea altor tipuri de senzori pentru a compensa limitările fiecăruia. ADI oferă o gamă largă de IMU-uri pentru a răspunde unor cerințe specifice pentru diverse aplicații ale roboților mobili.
Referințe
1 Shoudong Huang and Gamini Dissanayake. “Robot Localization: An Introduction.” John Wiley & Sons, Inc., August 2016.
2 Oliver J. Woodman. “An Introduction to Inertial Navigation.” University of Cambridge, August 2007.
3 robot_localization 2.6.12 documentation. Tom Moore, 2016.
4 Randy Carver and Mark Looney. “MEMS Accelerometer Calibration Optimizes Accuracy for Industrial Applications.” EE Times, October 2007.

Autor Sarvesh Pimpalkar,
System application engineer, ADI
Despre autor:
Sarvesh Pimpalkar este inginer de aplicații de sistem și lucrează în cadrul echipei “Industrial Edge, Motion and Robotics” de la Analog Devices, axându-se pe roboții mobili. Domeniul său de expertiză este proiectarea de sisteme software și dezvoltarea de produse în Linux și sisteme embedded. Deține o diplomă de master în inginerie electronică și informatică de la Universitatea din Dublin, un certificat Executive General Management Certificate Programme for Young Leaders de la IIM Bangalore și o diplomă de licență în inginerie electronică de la Universitatea din Mumbai. Înainte de a se alătura Analog Devices, Sarvesh a lucrat ca inginer de proiectare, dezvoltând hardware, firmware și automatizări pentru diverse produse industriale.
Vizitați https://ez.analog.com
![]()