

În gama largă de senzori şi traductoare ce sunt puşi la dispoziţie de către firma Aurocon COMPEC se găsesc şi elemente senzoriale cu efect Hall. Pe lângă senzorii uzuali de tip switch, pot fi achiziţionaţi şi senzori liniari, ce pot fi utilizaţi în aplicaţii de poziţionare, monitorizare, traductoare de curent e.t.c.
Senzorii cu efect Hall de tip switch de proximitate sunt foarte cunoscuţi şi apreciaţi în numeroase aplicaţii. Răspunsul circuitului este normal 0 logic când câmpul magnetic perpendicular pe suprafaţa acestuia este sub o valoare de prag. Când câmpul depăşeşte această valoare ieşirea din circuit trece pe 1 logic.
Alături de aceşti senzori, firma Aurocon COMPEC pune la dispoziţie o serie de dispozitive cu variaţie liniară a mărimii de ieşire, şi a căror funcţionare se bazează pe efectul Hall. Din categoria acestor senzori liniari cu efect Hall vor fi prezentaţi pe scurt senzori miniaturali – circuit integrat, şi senzorii LOHET I şi II.

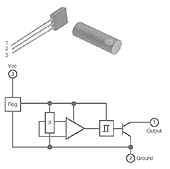
1. Circuit integrat miniatural cu efect Hall cu ieşire liniară – capsulă compactă cu 4 pini. Acest dispozitiv are două mărimi de ieşire diferenţiale. Tensiunea pe una dintre ieşiri creşte liniar în timp ce pe cealaltă descreşte, la o creştere a densităţii de flux magnetic peste ±40mT. Ca aplicaţii tipice pentru acest tip de circuit pot fi monitorizarea câmpului magnetic în vecinătatea transformatoarelor şi cablurilor, senzori de curent cu înaltă izolaţie, elemente senzoriale în sisteme de control. Senzorul are marele avantaj că este imun la creşteri mari ale densităţii fluxului magnetic.
Valori maxime admise: tensiune de alimentare +12Vdc; Curent de ieşire 20mA; Frecvenţă de lucru 100kHz; temperatura de lucru 40°C la +100°C; Temperatura de păstrare de la -55°C la +150°C.
Caracteristici electrice

2.Senzori cu efect Hall, liniari LOHET I şi II
Aceste dispozitive analogice au menirea de a produce o tensiune de ieşire proporţională cu intensitatea câmpului magnetic la care sunt expuse. Există două tipuri principale de astfel de senzori LOHET I şi LOHET II, fiecare fiind la rândul său realizat în mai multe variante.

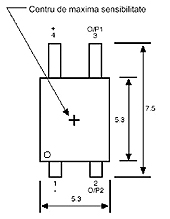
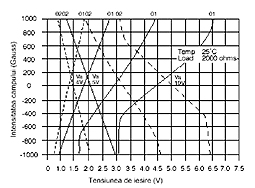
LOHET I – este un senzor de poziţie cu efect Hall ce răspunde atât la câmpul magnetic generat de magneţi permanenţi, cât şi la cel dat de electromagneţi. Dispozitvul este realizat pe un strat subţire de ceramică având trei pini PCB standard. Traductorul funcţionează la o alimentare între 8-16V (caracteristicile ce urmează sunt raportate la o alimentare de 12 V) Timpul maxim de răspuns este de 3µs, iar tensiunea de ieşire va creşte liniar cu câmpul magnetic, până la un nivel de +400 Gauss, la care tensiunea va fi de 9.0 V. Tensiunea de ieşire la 0 Gauss este 6V ± 0.6V, iar la -400 Gauss, tensiunea nominală va fi de 3.0V. Sensibilitatea este de 7.5±0.2 mV/gauss
LOHET II – este un senzor cu efect Hall de înaltă performanţă. Dispozitivul utilizează în construcţie un nou circuit integrat cu efect Hall, care îi conferă stabilitate crescută la variaţii de temperatură de aproape 10 ori mai bună decât în cazul lui LOHET I. Există mai multe dispozitive de acest tip: pentru uz general, derivă (drift) mică, înaltă sensibilitate, protecţie la zgomot.
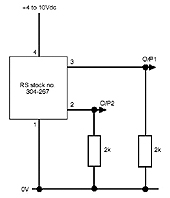
Traductoare de curent Aceste dispozitive utilizând în construcţie LOHET I sau II, au rolul de a monitoriza curentul şi de a produce un semnal de ieşire proporţional cu acesta. Având un semnal liniar, ce poate urmări forma de undă a curentului monitorizat, le face ideale în cazul necesităţii unor elemente de feedback pentru sistemele de comandă de motoare sau alte aplicaţii similare. Aceste traductoare utilizează un design cu gaură de trecere, ce simplifică instalarea, eliminând necesitatea conectării directe, minimizând pierderea de energie, oferind şi o izolaţie a semnalului de ieşire faţă de curentul ce îl generează.
Când curentul ce trece prin conductor este 0, ieşirea traductorului va indica o jumătate din tensiunea de alimentare. În funcţie de sensul curentului tensiunea de ieşire va creşte sau scade către 75%, respectiv 25% din tensiunea de alimentare, proporţional cu valoarea curentului. Aplicaţii: comanda motoarelor cu variaţie de viteză, diagnosticare auto (ex. detector de stare baterie), detectoare de scurtcircuit, protecţie la suprasarcină motoare, monitorizare curent în diferite circuite de putere.
Determinarea poziţiei cu ajutorul traductoarelor liniare cu efect Hall
În cele ce urmează vor fi prezentate câteva aplicaţii simple de determinare a poziţiei cu ajutorul traductoarelor cu efect Hall liniare. Diferenţa dintre ele constă în modalitatea prin care sisteme magnetice influenţează traductorul de tip Hall, iar alegerea depinde de cerinţele şi performanţele aplicaţiei date.
Metodă unipolară de determinare a poziţiei
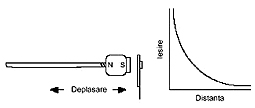
Unul dintre polii unui magnet este deplasat către sau dinspre traductorul LOHET 1, reprezentând un senzor de poziţie. Când magnetul este departe (în funcţie de raza de acţiune) câmpul magnetic generat tinde spre 0, iar ieşirea senzorului indică 6 V la o alimentare de 12 V (LOHET I). Dacă polul sud al magnetului este apropiat de senzor, câmpul magnetic la suprafaţa sensibilă creşte în sens pozitiv. Tensiunea de ieşire va creşte liniar cu câmpul magnetic până la pragul de +400 Gauss, când ieşirea va fi de 9 V. Ieşirea ca funcţie de distanţă nu este liniară, dar pe distanţe mici poate fi considerată aşa.
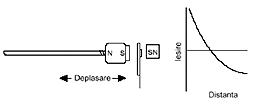
Metodă bipolară de determinare a poziţiei

Când magneţii sunt deplasaţi spre către stânga, traductorul primeşte efectul unui puternic câmp magnetic negativ, dat de magnetul 2, ieşirea senzorului (LOHET I) ajungând la 3 V. Atunci când senzorul se află la egală distanţă între cei doi magneţi câmpurile magnetice ale acestora se anulează reciproc. Ieşirea senzorului va fi de 6 V. La o deplasare spre dreapta ieşirea senzorului tinde spre 9 V. Această abordare oferă o bună acurateţe şi rezoluţie, utilizând deasemenea întreaga plajă a traductorului. Ieşirea este liniară pe o plajă în jurul valorii de 0.
Sistem polarizat pentru determinarea poziţiei
Este o variantă a poziţionării bipolare, în care însă unul dintre magneţi este fix. Atunci când magnetul mobil este îndepărtat, senzorul (LOHET I) este supus unui câmp magnetic negativ generat de magnetul fix de polarizare. La apropierea magnetului mobil, efectul celor două câmpuri se combină, iar odată cu continuarea apropierii câmpul devine pozitiv. Această abordare conferă o mare simplitate mecanică.
Identificarea poziţiei cu sistem glisant
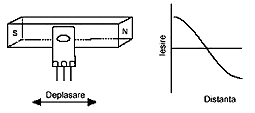
Între magnet şi senzorul LOHET I se menţine o distanţă mică,controlată. La mişcarea într-o parte sau alta, câmpul “văzut” de senzor devine negativ în apropierea polului nord şi pozitiv în apropierea polului sud. Cursa ce poate fi astfel măsurată depinde de lungimea magnetului utilizat. Caracteristica de ieşire în acest caz este cea mai apropiată de liniar dintre toate sistemele prezentate.
Dispozitivele senzoriale bazate pe efect Hall, prezentate de firma Aurocon COMPEC, oferă bune caracteristici atât pentru aplicaţii clasice de tip switch, cât şi pentru aplicaţii ce necesită variaţie liniară a mărimii de ieşire, precum sisteme de identificare a poziţiei, monitorizare de curent e.t.c.
www.compec.ro