


Controlul roboților industriali cu 9 axe cu un microprocesor “single-chip”
Acest articol explorează modalitatea de implementare a controlului motorului pentru până la 9 axe (cu ajutorul unui microprocesor), procesarea de înaltă performanță a aplicațiilor și Ethernet industrial multiprotocol, soluție care reduce semnificativ numărul de componente utilizate în roboții industriali și scurtează considerabil timpul de dezvoltare.
Privire de ansamblu
Nevoia în creștere pentru automatizări industriale și reducing a costurilor în fabrici a dus la o cerere tot mai mare pentru roboți industriali, în special pentru roboții cu articulație verticală. Pentru construirea acestor roboți, dezvoltatorii au nevoie de performanțe în timp real pentru a controla motoare cu multiple axe, de funcții avansate de comandă a motorului, performanțe ridicate în procesarea aplicațiilor (pentru calcularea traiectoriei brațului robotului) și suport pentru middleware-uri precum ROS (Robot Operating System). De asemenea, suportul pentru comunicațiile în rețea este esențial, iar Ethernet industrial este utilizat pentru conectarea robotului la rețeaua fabricii.
Controlerele convenționale pentru roboți industriali utilizează FPGA-uri pentru controlul motorului, CPU-uri de înaltă performanță pentru procesarea aplicațiilor și ASSP-uri pentru Ethernet-ul industrial. Fiecare dintre aceste componente necesită surse de alimentare separate, ceasuri și memorie, ceea ce nu doar că adaugă un număr mare de componente, dar complică și proiectarea circuitului și layout-ul sistemului. În plus, acestea necesită o proiectare extinsă și o evaluare riguroasă a funcțiilor implementate în FPGA.
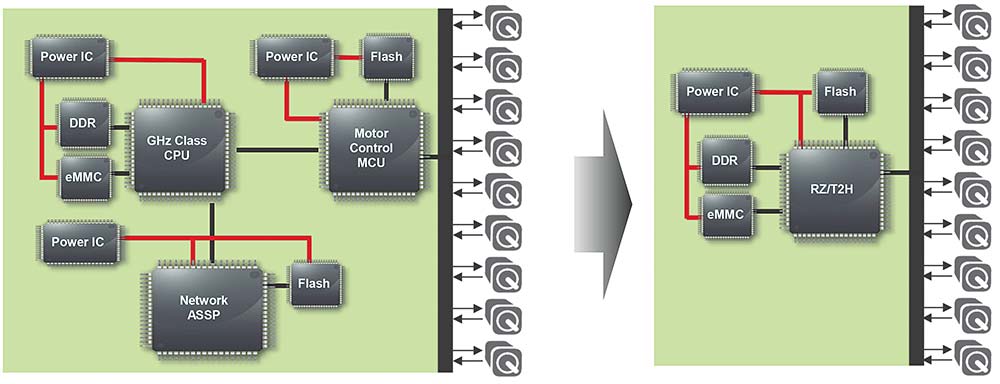
Figura 1: Reducerea numărului de componente într-un robot industrial echipat cu microprocesorul RZ/T2H. (Sursă imagine: Renesas)
Îndeplinirea tuturor cerințelor pentru controlul motoarelor cu până la 9 axe pe un singur cip
Pentru a controla servomotoarele utilizate în roboții industriali, este necesară execuția unui proces în buclă de curent în cadrul ciclului specificat al semnalului purtător, pentru a prelua valoarea curentului care circulă prin motor și informațiile de poziție, setând ieșirea timerului PWM trifazat. Deoarece roboții industriali execută această procesare în buclă de curent pentru toate axele de care dispun, aceștia necesită performanțe în timp real de înaltă precizie. Roboții industriali convenționali execută bucla de curent pentru mai multe axe utilizând FPGA-uri care permit procesare paralelă sau mai multe microcontrolere. În plus, pentru ca Ethernet-ul industrial să sincronizeze cu precizie dispozitivele între ele, este nevoie și de o unitate CPU adecvată pentru procesarea în timp real.
Microprocesorul de la Renesas RZ/T2H dispune de două nuclee în timp real Arm® Cortex®-R52, fiecare având o frecvență de operare de 1GHz și o memorie TCM (Tightly Coupled Memory) de mare capacitate (576KB), eliminând fluctuațiile timpului de execuție care apar la utilizarea memoriei cache și permițând, astfel, o procesare deterministă cu răspuns de mare viteză. În plus, unitatea TFU (Function Unit Trigonometric – unitatea de funcții trigonometrice) și perifericele utilizate pentru controlul motorului sunt amplasate pe magistrala LLPP (Low-Latency Peripheral Port Bus) conectată direct la CPU, fapt care permite accesul de mare viteză al CPU-ului și procesarea rapidă a buclei de curent. Folosind programul demonstrativ al Renesas, avem confirmarea că un CPU CR52 poate executa procesarea buclei de curent pentru 9 axe în mai puțin de 8us, iar o frecvență purtătoare de 100kHz (=10us) este realizabilă cu RZ/T2H. Prin urmare, dezvoltatorii pot efectua controlul unui motor cu 9 axe cu un CPU CR52 pe RZ/T2H, suportând, în același timp, Ethernet industrial cu un alt CPU CR52.
Controlul unui motor cu mai multe axe necesită un timer PWM care să suporte ieșiri trifazate complementare, un demodulator delta-sigma pentru măsurarea curentului care circulă prin motor și o interfață de encoder pentru obținerea informațiilor de poziție, toate acestea trebuind să fie echipate pentru numărul necesar de axe. În plus, timerul PWM necesită operare sincronizată între axe, iar encoderul utilizează protocoale diferite în funcție de producător, cum ar fi A-format™, EnDat și BiSS®. Pentru a obține funcțiile necesare în ceea ce privește numărul de axe, sincronizarea între timerele PWM și codificatoarele multi-protocol, se utilizează FPGA-uri.
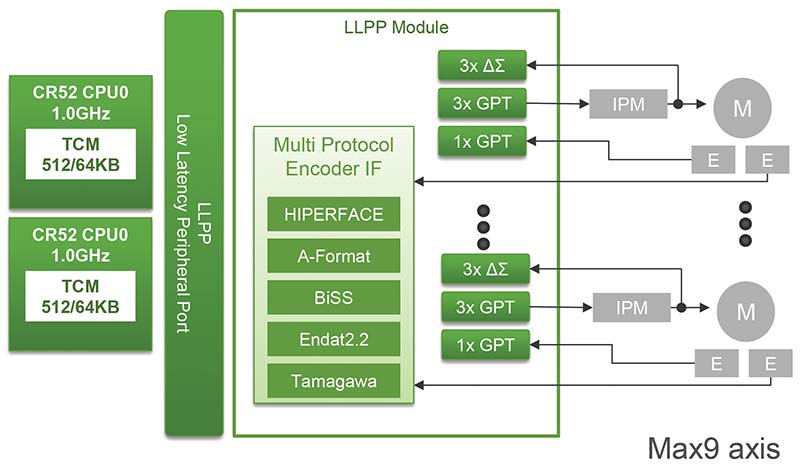
Figura 2: Configurație hardware prin care se realizează controlul de mare viteză al motoarelor cu 9 axe. (Sursă imagine: Renesas)
Microprocesorul RZ/T2H este echipat cu timere PWM, modulatoare delta-sigma și interfețe encoder, menționate mai sus, toate fiind disponibile pentru 9 axe. Timerele PWM pentru cele 9 axe pot opera sincronizat, iar interfața encoderului suportă, de asemenea, mai multe protocoale. Prin utilizarea RZ/T2H, care oferă performanțe înalte în timp real și o multitudine de periferice pentru controlul motorului, acum este posibilă reducerea numărului de componente și a dimensiunii PCB, precum și a timpului de dezvoltare pentru implementarea funcțiilor în FPGA, de care nu mai este nevoie.
Procesare de mare viteză cu o unitate CPU de aplicație
Controlerele pentru roboții industriali trebuie să comande mișcări pe mai multe axe, dar și să proceseze rapid sarcinile aplicației. Pe lângă generarea traiectoriei necesare pentru deplasarea precisă și lină a brațului și calcularea valorilor pentru controlul fiecărei axe pe baza planului traiectoriei, sunt necesare procesoare de înaltă performanță și suport DDR pentru a rula software open-source pe Linux. De exemplu, ROS oferă middleware pentru controlul roboților, iar ORiN permite conectarea cu dispozitive de la alți producători și versiuni.
RZ/T2H este un microprocesor echipat cu un unitate centrală Cortex-A55 cu patru nuclee la 1,2 GHz pentru procesarea aplicațiilor. Acesta are 32 KB/32 K B L1 I/D-cache per nucleu și 1024 KB L3 cache implementat ca un cache comun. Este echipat cu un DDR IF care acceptă LPDDR4-3200 pe 32-biți și SD/eMMC pentru stocarea programelor mari și poate rula aplicații Linux. În plus, este posibilă utilizarea unei combinații de Linux, RTOS și “bare metal” (fără sistem de operare) pe cele patru nuclee și acceptă partajarea cache-ului, care alocă zone ale cache-ului comun L3 fiecărui nucleu.
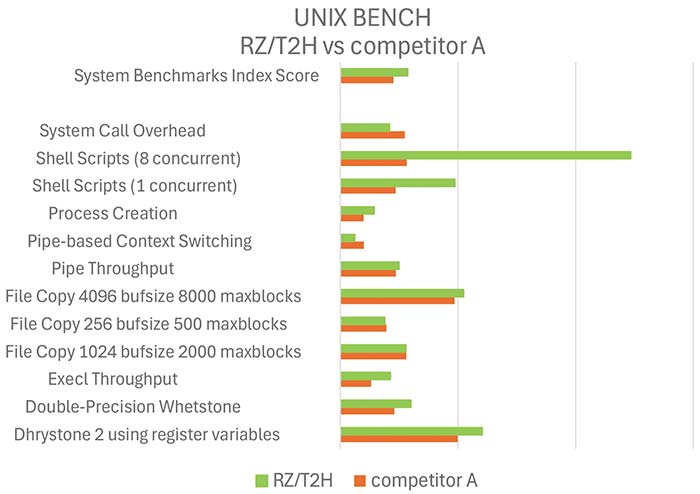
Rezultate UNIXBENCH. (Sursă imagine: Renesas)
Diagrama alăturată prezintă rezultatele rulării UNIXBENCH pe Linux folosind un RZ/T2H și un microprocesor de la o altă companie care are patru CPU-uri de aplicație. Rezultatele au evidențiat faptul că acest microprocesor (RZ/T2H) obține scoruri ridicate între 35-75% pentru fiecare categorie. Utilizând dispozitivul RZ/T2H, este posibil să se accelereze ciclul de actualizare a valorilor pentru controlul fiecărei axe a motorului și să se proceseze algoritmi mai complecși de planificare a traiectoriei, realizându-se astfel mișcări mai precise ale robotului.
Comunicații Ethernet multiple cu protocoale multiple
În fabricile care utilizează roboți industriali, dispozitivele de la diferiți producători vor fi conectate la o rețea, iar protocoalele Ethernet industriale precum EtherCAT, PROFINET și EtherNet/IP, specializate în comunicații în timp real, sunt utilizate pentru a crește și mai mult precizia sincronizării între dispozitive. Precizia sincronizării între dispozitive are un impact semnificativ asupra eficienței producției, deoarece aceasta este utilizată atât pentru operațiunile simultane ale mai multor roboți, cât și pentru reducerea timpilor de așteptare. În roboții industriali convenționali, au fost utilizate ASSP-uri dedicate pentru a suporta aceste protocoale Ethernet industriale multiple. În plus față de Ethernet-ul industrial, este necesară o comunicație Ethernet independentă de Ethernet-ul industrial pentru a comunica cu PC-urile și sistemele de management pentru monitorizarea stării și actualizarea versiunilor software, precum și pentru conectarea la dispozitive HMI externe.
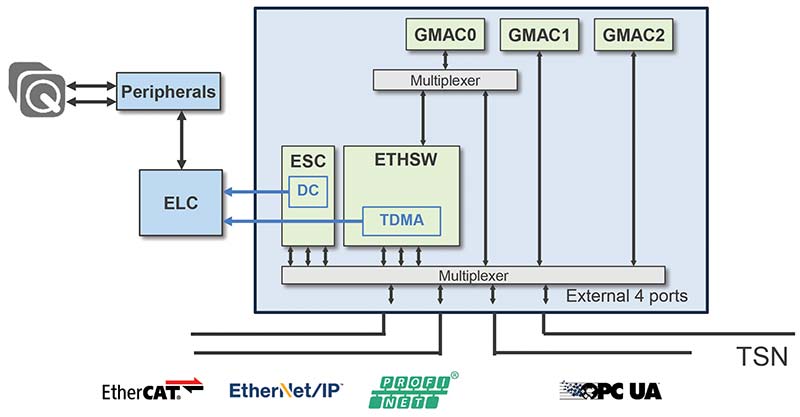
Figura 3: Configurație hardware pentru a suporta mai multe comunicații Ethernet cu mai multe protocoale. (Sursă imagine: Renesas)
RZ/T2H este echipat cu patru porturi Ethernet externe, trei MAC-uri Gigabit Ethernet (GMAC), un switch Gigabit Ethernet (ETHSW) și un controler slave EtherCAT® (ESC); este compatibil cu protocoalele majore de comunicație Ethernet industrial, cum ar fi EtherCAT, PROFINET RT/IRT, EtherNet/IP™ și OPC UA, precum și cu standardul TSN (Time-Sensitive Networking) de ultimă generație. Sunt posibile implementări Ethernet multiple prin atribuirea GMAC, ETHSW și ESC celor patru porturi Ethernet externe. De exemplu, două porturi pot fi utilizate pentru Ethernet industrial, iar celelalte două porturi pot fi utilizate pentru Ethernet de uz general. Dacă nu este nevoie de Ethernet industrial, se pot utiliza până la trei porturi pentru Ethernet de uz general, permițând utilizatorilor să implementeze funcții de rețea flexibile. În plus, semnalele de sincronizare a rețelei pentru ETHSW, cum ar fi TDMA și DC (Distribute Clock) al ESC, sunt conectate la Event Link Controller (ELC) în RZ/T2H. Această conexiune permite operarea funcțiilor periferice cu latență redusă și sincronizarea operațiunilor cu diferite dispozitive conectate la rețea, ceea ce asigură o sincronizare de înaltă precizie. Astfel, este posibilă o sincronizare de înaltă precizie, împreună cu operarea coordonată cu alte dispozitive din rețea, îmbunătățind productivitatea.
Rezumat
Articolul a prezentat metode de îmbunătățire a performanței roboților industriali prin utilizarea unui microprocesor RZ/T2H, precum și de reducere atât a numărului de componente, cât și a timpului de dezvoltare. Acest lucru permite utilizatorilor tehnologiei RZ/T2H să sporească competitivitatea roboților lor industriali, precum și să își scurteze timpul de lansare pe piață.
Renesas oferă o soluție prin care dezvoltatorii pot experimenta controlul motoarelor cu 9 axe utilizând un microprocesor RZ/T2H. Programele demonstrative pentru controlul unui motor cu 9 axe pot fi descărcate de pe site-ul web al Renesas. Placa de evaluare pentru RZ/T2H și placa invertor, create pentru a comanda motoare cu 9 axe, sunt disponibile pentru achiziționare din magazinul online al Renesas. Pentru mai multe informații, consultați pagina produsului RZ/T2H.
![]() Autor: Koichi Sugata,
Autor: Koichi Sugata,
Principal Engineer of Embedded Processing,
Renesas Electronics
Informații suplimentare
RZ/T2H: Microprocesor de ultimă generație cu capabilități integrate de procesare a aplicațiilor și control în timp real de înaltă precizie pentru acționarea motoarelor cu 9 axe
RZ/T2H Evaluation Kit: Un kit de evaluare și dezvoltare pentru RZ/T2H
ROS: Robot Operating System este un software open-source utilizat în dezvoltarea roboților
ORiN: Consorțiul ORiN – Middleware pentru conectarea echipamentelor și integrarea sistemelor, depășind barierele standardelor
Renesas Electronics Europe | https://www.renesas.com
![]()