

 Pentru mediile dure ce pot fi întâlnite în numeroase aplicaţii auto, un driver LED inteligent şi sigur, poate fi esenţial. Prin utilizarea flexibilităţii unui microcontroler pe 8 biţi, un astfel de driver LED poate menţine consistenţa temperaturii de culoare a LED-ului, crescând durata de viaţă a LED-ului, îmbunătăţind metodele de reglare a luminozităţii şi integrând funcţii de siguranţă.
Pentru mediile dure ce pot fi întâlnite în numeroase aplicaţii auto, un driver LED inteligent şi sigur, poate fi esenţial. Prin utilizarea flexibilităţii unui microcontroler pe 8 biţi, un astfel de driver LED poate menţine consistenţa temperaturii de culoare a LED-ului, crescând durata de viaţă a LED-ului, îmbunătăţind metodele de reglare a luminozităţii şi integrând funcţii de siguranţă.
Utilizarea perifericelor independente de nucleu în cadrul unui microcontroler precum Microchip PIC16F753 poate permite ca trenul de putere al driverului pentru LED-uri să opereze în mod de conducţie continuă la frecvenţă fixă şi să stabilizeze curentul prin LED-uri utilizând un mod de control al curentului de vârf. Perifericele independente de nucleu utilizate în acest proiect sunt un generator de ieşire complementar (COG), un comparator, compensator de pantă (SC) şi un amplificator operaţional (OPA). Combinând acestea cu alte periferice pe cip, precum porturi IO, referinţe fixe de tensiune (FVR), convertor digital-analog (DAC), temporizatoare, CCP (capture-compare-PWM) şi convertor analog-digital (ADC), se poate aduce inteligenţă întregului sistem.
Această combinaţie poate conduce la funcţii precum control al curentului de vârf cu lăţime mare de bandă, complet compensat, control PWM al reglării luminozităţii, reducere a puterii la o temperatură a carcasei de +110°C, protecţie la scurtcircuit, protecţie la tensiunea de intrare pentru valori tranzitorii şi inversare, precum şi indicator de ieşire de eroare.
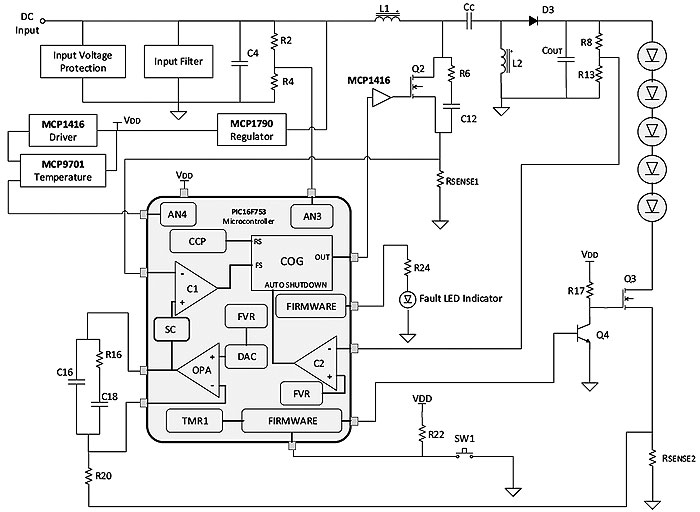
Figura 1: Schema simplificată a driverului LED SEPIC.
SEPIC
Trenul de putere al driverului LED utilizat în această aplicaţie se bazează pe un convertor SEPIC (single-ended primary inductance converter). Această topologie de convertor DC-DC hibrid este un driver LED atractiv pentru aplicaţii auto, deoarece el poate oferi o ieşire stabilizată de tensiune sau curent chiar dacă tensiunea de alimentare de intrare trece deasupra sau dedesubtul tensiunii de ieşire.
Totuşi, dacă tensiunea de alimentare pentru electrica auto scade sub tensiunea LED-ului pe durata instabilităţii la rece sau pe durata încărcării, SEPIC poate menţine un curent constant prin LED. De asemenea, SEPIC poate gestiona într-o manieră de controler o condiţie de scurtcircuit. Acest lucru se întâmplă deoarece cuplajul prin condensator întrerupe linia de la intrare la ieşire, atunci când pe sarcină există un scurtcircuit. Se evită astfel distrugerea circuitului, sau, mai rău, un incendiu.
Modul de operare
În schema simplificată a driverului pentru LED-uri din figura 1, întregul circuit este controlat de microcontrolerul ce utilizează perifericele sale de pe cip.
Funcţia principală a driverului LED este de a păstra constant curentul de ieşire al convertorului, indiferent de cum variază sursa electrică auto şi rezistenţa echivalentă a LED-urilor. Curentul constant furnizat de driver menţine temperatura de culoare a LED-ului. După aplicarea unei tensiuni de curent continuu pozitive pe intrarea driverului LED pentru a porni circuitul, tensiunea microcontrolerului VDD, stabilizată la 5V de MCP1790, creşte. Atunci când VDD este suficient de ridicată, iar frecvenţa de cea a microcontrolerului este stabilizată, OPA, ADC, FVR, DAC, CCP1, SC, C1, C2, temporizatorul 1 şi perifericele COG sunt iniţializate şi conectate împreună.
După iniţializare, COG este încă dezactivat, iar OPA este configurat pentru a lucra la câştig unitar. Firmware-ul aşteaptă până când ADC scoate tensiunea de intrare necesară pentru canalul AN3. Atunci când intrarea atinge 7V, firmware-ul activează COG. De asemenea, firmware-ul reconfigurează OPA pentru a converti intrarea sa inversată pe pinul IO. Atunci când COG este deja activat, el furnizează un semnal PWM care comandă intrarea driverului MOSFET MCP1416 pentru a porni/opri Q2 în mod repetat. Ca şi în cazul altor topologii de convertoare, SEPIC în mod de conducţie continuă asumă două stări pe ciclul de comutaţie la condiţia de aşteptare. În starea de pornire, ieşirea COG este de nivel ridicat şi Q2 este ON; în starea de oprire, ieşirea COG este de nivel scăzut şi Q2 este OFF.
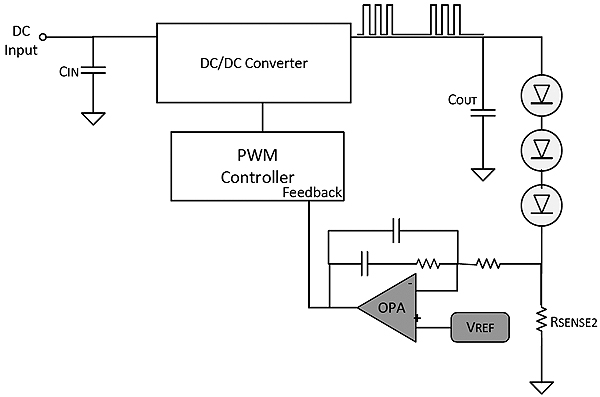
Figura 2: Circuit de reglare a luminozităţii pentru LED-uri, bazat pe PWM.
Reglarea luminozităţii LED prin PWM
Una dintre modalităţile de a reduce luminozitatea LED-ului, este de a regla curentul direct prin LED, dar acest tip de reglaj poate cauza schimbarea temperaturii de culoare. De aceea, reglarea luminozităţii LED-ului pe bază de PWM păstrează constant curentul direct, ceea ce conduce la o constanţă a temperaturii de culoare, semnalul PWM conducând LED-ul rapid în stare pornit / oprit.
Într-un driver LED uzual cu comutaţie PWM, ce poate fi observat în figura 2, convertorul DC-DC transferă energia la frecvenţe de comutaţie ridicate pentru a furniza curent LED-ului. Controlerul convertorului DC-DC monitorizează tensiunea prin rezistenţa de detecţie RSENSE2 a LED-ului, din circuitul de reacţie, pentru a creşte sau scădea factorul de umplere al semnalului de ieşire PWM ce comandă comutatorul convertorului DC-DC. Această schimbare liniară a factorului de umplere PWM păstrează constant curentul LED-ului.
Reglarea este obţinută prin trecerea ieşirii PWM a controlerului în stare ON şi OFF la o frecvenţă mult mai mică decât frecvenţa sa de comutaţie. Semnalul de reglare poate fi intern sau exterm microcontrolerului. Acesta produce o ieşire de tensiune PWM modulată în frecvenţă care porneşte şi opreşte LED-ul. Strălucirea percepută a LED-ului este proporţională cu factorul de umplere al semnalului PWM.
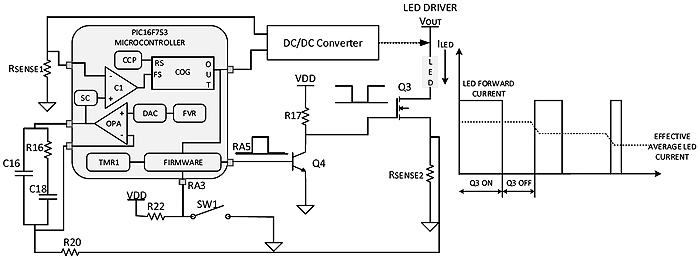
Figura 3: Circuit îmbunătăţit de reglare a strălucirii LED.
Dezavantaje
Cu toate că circuitul din figura 2 oferă un control al strălucirii, există două dezavantaje ce trebuie luate în considerare. Ele apar instantaneu pe durata comutaţiei ON sau OFF a LED-ului.
Primul apare atunci când LED-ul este oprit (OFF). În timpul acestui eveniment, curentul de ieşire a LED-ului este gradual diminuat, prin descărcarea lentă a condensatorului de ieşire, ce poate conduce la o schimbare a temperaturii de culoare şi la o disipare mai mare a LED-ului.
Al doilea dezavantaj vine din circuitul de reacţie al driverului. Atunci când LED-ul este pornit (ON), curentul este furnizat către LED, iar tensiunea prin rezistenţa de detecţie RSENSE2 este legată la amplificatorul de eroare (EA). Atunci când LED-ul trece în stare OFF, către LED nu se furnizează niciun curent, iar tensiunea pe RSENSE2 devine 0. Pe durata acestui timp de OFF, ieşirea EA crește la maximul său şi supraîncarcă reţeaua de compensare a EA. Când semnalul modulat PWM trece din nou în stare ON, este nevoie de câteva cicluri înainte ca prin LED să poată reveni curentul de vârf necesar. Acest fenomen scurtează durata de viaţă a LED-ului.
Pentru a preveni apariţia acestor dezavantaje, prin firmware şi componente adiţionale pot fi implementate tehnici de reglare îmbunătăţite. Pentru a elimina efectul de descărcare lentă a condensatorului de ieşire, între LED şi RSENSE2 poate fi adăugat un comutator de sarcină (Q3), după cum se poate vedea în figura 3. Atunci când ieşirea PWM COG este dezactivată pentru a opri LED-ul, Q3 este deschis pentru a tăia calea căderii curentului şi pentru a permite LED-ului să se oprească mai rapid.
Pe de altă parte, curentul de vârf ridicat ce apare pe durata tranziţiei LED-ului de la off la on, poate fi eliminat prin forţarea ca OPA să fie dezactivată în firmware pe durata timpului de OFF a LED-ului. Dezactivarea OPA, deconectează complet intrarea şi ieşirea inversoare a OPA de la GPIO în trei stări. Aceasta înseamnă că reţeaua de compensare este complet deconectată de la bucla de reacţie şi păstrează ultimul punct de reacţie stabilă ca încărcare stocată în condensatorul de compensare.
Atunci când LED-ul se aprinde din nou, reţeaua de compensare se reconectează, iar tensiunea de ieşire OPA sare imediat la starea stabilă anterioară, înainte ca LED-ul să fie în starea OFF, revenind aproape instantaneu la valoarea de curent stabilită.
Semnalul PWM care controlează comutaţia Q3 este adus de firmware. Acesta, printr-un impuls pe RA5 comută tranzistorul Q4 pentru a comanda poarta Q3 şi pentru a comuta LED-ul on şi off. Efectiv, Q4 inversează ieşirea PWM de la pinul RA5 pentru a comanda Q3. Când ieşirea PWM este de nivel jos, Q4 este off şi poarta Q3 este trasă către VDD. Aceasta permite intrarea în conducţie a Q3.
Atunci când Q3 este în stare on, există o cale de curent între LED şi masă, ceea ce permite trecerea unui curent şi pornirea LED-ului. Atunci când ieşirea PWM trece în nivel logic superior, Q4 porneşte şi poarta Q3 este trasă la masă, oprind conducţia. Când Q3 este in stare off, LED-ul este deconectat la masă, astfel că LED-ul se stinge. De asemenea, atunci când Q3 este în stare off, ieşirea COG este de asemenea dezactivată pentru a evita o creştere continuă a tensiunii la ieşirea convertorului care eventual declanşează OOVP. Frecvenţa PWM este aleasă într-o asemenea manieră încât ochiul omenesc nu poate percepe licărirea. Aprinderea şi stingerea repetată a LED-ului produce o mediere a curentului prin LED la ieşirea driverului LED. Această mediere poate fi utilizată ca o reprezentare a strălucirii LED-ului. De aceea, atunci când factorul de umplere al PWM de la ieşirea RA5 se schimbă pe controlul strălucirii LED-ului, se schimbă de asemenea şi curentul mediu prin LED. Curentul mediu liniar al LED-ului poate varia liniar prin apăsarea comutatorului SW1. Plaja totală de la 0 la 100%, poate fi reglată în 25 de paşi. Prin apăsarea SW1, strălucirea este crescută cu aproximativ 4% per pas. Atunci când este atins maximul de diminuare a strălucirii de 100%, la următoarea apăsare a SW1 diminuarea va trece în starea 0% în stare off.
Concluzie
Prin utilizarea flexibilităţii microcontrolerului PIC 16F753, driverul LED poate menţine consistenţa temperaturii de culoare a LED-ului, crescând durata de viaţă a LED-ului, îmbunătăţind metoda de reglare a strălucirii şi permiţând funcţii de siguranţă. Aceasta înseamnă că este posibilă crearea de drivere LED inteligente şi sigure pentru medii auto dure.
Microchip Technology | www.microchip.com
![]()