

Brian Chu de la Microchip Technology Inc., compară avantajele şi dezavantajele diferitelor abordări al controlului motoarelor BLDC.
de: Brian Chu, Product Line Marketing Manager, Departamentul de produse analogice şi de interfaţare. Microchip Technology Inc.
Motoarele de curent continuu fără perii (BLDC) câştigă din ce în ce o cotă mai mare de piaţă faţă de alte tehnologii de motoare, în special pe pieţele auto şi medicale, iar acest lucru a condus la dezvoltarea de noi abordări în proiectarea controlerelor de motoare. Acum, proiectanţii trebuie să decidă ce soluţie este cea mai bună pentru fiecare aplicaţie.
Abordarea tradiţională este de a dezvolta circuitul de control pentru motor din componente discrete, dar dezvoltările mai recente oferă soluţii pe un cip, bazate pe SoC (System on Chip) sau pe ASSP (Application-Specific Standard Product) sau pe două cipuri. În vreme ce toate soluţiile pe 1 sau 2 cipuri recente oferă o reducere a numărului de componente şi a complexităţii, fiecare abordare are avantaje şi dezavantaje specifice. Acesta este lucrul pe care trebuie să-l înţeleagă proiectantul pentru a face cea mai bună alegere între flexibilitate şi integrare cu economie de spaţiu.
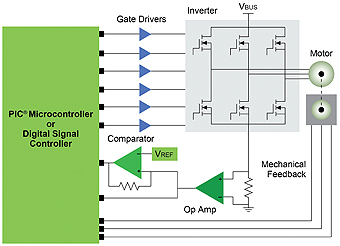
Indiferent de ce abordare este utilizată, un sistem tipic cu motor este realizat din trei elemente principale: sursa de alimentare, driverul pentru motor şi unitatea de control. În figura 1 este prezentat un circuit tradiţional bazat pe componente discrete, ce utilizează un procesor simplu RISC cu flash pe cip pentru a controla driverele poartă, care, în schimb, comandă MOSFET-urile externe. O metodă alternativă este de a comanda motorul direct de la un procesor, cu MOSFET-uri integrate şi stabilizatoare de putere pentru a alimenta procesorul şi driverul.
Toate aceste elemente sunt tipic integrate într-un driver de motor SoC. Suplimentar, driverul SoC oferă avantajul programabilităţii, ceea ce permite utilizarea sa în multiple aplicaţii. Ca abordare cu un singur cip, un SoC este de asemenea potrivit pentru aplicaţii care au spaţiu de placă limitat.
Neajunsul utilizării proiectelor bazate pe SoC este acela al performanţelor de procesare scăzute şi al memoriei interne limitate, ceea ce însemnă că nu se poate răspunde cerinţelor aplicaţiilor care necesită un control avansat al motoarelor.
Un alt neajuns este acela că, prin comparaţie cu uneltele de dezvoltare vaste oferite de producătorii de microcontrolere, este oferit un suport semnificativ mai slab pentru dezvoltarea de firmware pentru driverele de motoare SoC.
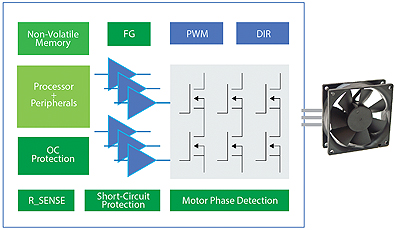
O alternativă SoC a abordării cu un singur cip este utilizarea unui driver de motor ASSP (Application-Specific Standard Product), proiectat specific pentru fiecare aplicaţie. Avantajul utilizării unui ASSP este acela că ocupă un spaţiu minim de placă, ceea ce îl face ideal pentru aplicaţii cu constrângeri legate de spaţiu. În figura 2 este prezentat un driver DFN cu 10 pini independent pentru motor de ventilator. ASSP-urile elimină de asemenea necesitatea de reglaje software, în vreme ce oferă un excelent raport performanţă/preţ în aplicaţii de mare volum şi performanţe ce le egalează pe cele ale microcontrolerelor de vârf. Un driver de motor ASSP poate să fie, de exemplu, utilizat pentru comanda unui motor BLDC utilizând algoritmi sinusoidali şi fără senzori. Pe lângă aceste avantaje, ASSP-urilor le lipseşte programabilitatea, care le-ar face scalabile şi flexibile pentru a se adapta schimbărilor de pe piaţă.
În vreme ce strategiile de proiectare bazate pe SoC sau ASSP pot ajuta proiectanţii să răspundă cerinţei continue de miniaturizare, alte aplicaţii care utilizează abordarea cu două cipuri ce combină un microcontroler optimizat pentru analogică inteligentă în conjuncţie cu un driver extern. Această abordare permite proiectanţilor să aleagă dintr-o gamă largă de microcontrolere optimizate pentru comutaţie cu senzori sau fără senzori utilizând tehnici de comandă trapezoidală sau sinusoidală.
Atunci când se selectează cipul de driver care acompaniază microcontrolerul, este esenţial ca driverul să facă mai mult decât să ofere puteri nominale potrivite pentru MOSFET sau motorul BLDC. El trebuie de asemenea să integreze un stabilizator de tensiune reglabil de înaltă eficienţă, capabil de a minimiza disiparea de putere în vreme ce alimentează o gamă largă de microcontrolere. Blocurile de monitorizare şi administrare sunt esenţiale pentru a asigura siguranţa operării motorului şi pentru a permite comunicaţie bidirecţională între gazdă şi driver. Parametrii selectabili vor permite ca performanţa driverului să fie optimizată fără altă programare adiţională.
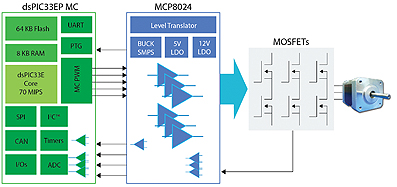
În figura 3 este prezentată o soluţie standard cu două cipuri. Această abordare combină un driver de motor trifazat bogat în caracteristici, precum Microchip MCP8024, cu un controler de semnal digital (DSC) de înaltă performanţă dsPIC33EP MC pentru comanda MOSFET-uri cu şase canale N pentru controlul orientat pe câmp al unui motor sincron cu magneţi permanenţi (PMSM). Atunci când se utilizează o arhitectură de control pe 6 paşi simplă, în locul DSC poate fi utilizat un microcontroler economic pe 8 biţi. Schimbarea DSC-ului cu microcontrolerul pe 8 biţi poate fi implementată fără afectarea circuitului driverului dacă este utilizat un motor BLDC cu putere nominală similară.
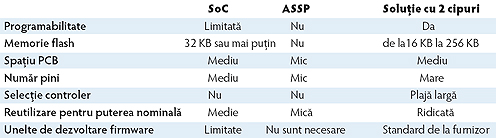
În tabelul 1 sunt prezentate avantajele relative ale schemei de control motoare BLDC cu un singur cip, bazate pe un SoC sau ASSP, precum şi ale abordării cu două cipuri cu un microcontroler sau DSC şi un driver companion. Acest tabel arată că, în vreme ce un SoC sau un ASSP vor întruni necesităţile unor aplicaţii cu constrângeri legate de spaţiu, setul lor de caracteristici fixe combinat cu memoria limitată şi puterea de procesare mică reduc semnificativ flexibilitatea şi scalabilitatea proiectului. Apariţia soluţiilor de control a motoarelor BLDC în variantele cu un singur cip sau cu două cipuri permite proiectanţilor să reducă costul componentelor şi spaţiul pe placă necesar faţă de circuitele uzuale bazate pe componente discrete.
Bibliotecile şi proiectele de referinţă hardware şi firmware, furnizate de producători precum Microchip, reduc semnificativ timpul de dezvoltare a aplicaţiilor de control motoare şi lansarea lor pe piaţă.
Microchip Technology
www.microchip.com