


Cum pot utiliza IMM-urile un metavers industrial pentru a explora și implementa rapid soluții robotizate
Articolul analizează, pentru început, distincția dintre un geamăn digital matematic, descris de date, și un geamăn digital vizual (geamăn VR) și modul în care ambele sunt necesare pentru crearea unui metavers industrial. Apoi, prezintă un sistem de control al roboților și software-ul aferent de la Igus pentru a simula un robot printr-o interfață 3D (geamăn digital vizual) fără a utiliza hardware fizic, cu ajutorul roboților delta, liniari și multiaxiali compatibili, pentru a realiza soluția optimizată.
Roboții și coboții (roboții colaborativi) sunt în avangarda tehnologiilor de automatizare a fabricilor. Gemenii digitali și realitatea virtuală (VR) se află în fruntea instrumentelor de proiectare și dezvoltare. Combinate, acestea pot fi valorificate pentru a crea un metavers industrial care să asigure o productivitate mai mare și mai rapidă, chiar și pentru întreprinderile mici și mijlocii (IMM-uri).
Proiectanții din cadrul IMM-urilor pot beneficia de o interfață simplă și intuitivă care combină un geamăn digital, un model virtual extrem de detaliat al unui obiect fizic precum un robot delta, liniar sau cu mai multe axe și un mediu VR tridimensional (3D) pentru a permite executarea și verificarea directă a secvențelor de mișcare ale robotului.
Utilizarea acestor caracteristici permite reglarea fină și optimizarea sistemului de automatizare, chiar în absența oricărui hardware fizic și permite explorarea rapidă a diverselor modalități de soluționare.
Geamăn digital și VR
Gemenii digitali și VR-urile sunt tehnologii complementare care utilizează diferite forme de vizualizare, interacțiuni și hardware. Gemenii digitali sunt modele ale obiectelor, sistemelor sau proceselor fizice bazate pe date. Acestea sunt create pentru a fi utilizate pe parcursul întregului ciclu de viață al elementului modelat, pornind de la conceptul inițial până la dezafectare și reciclare.
VR este o tehnologie imersivă, bazată pe imagini, care utilizează, de asemenea, modele digitale. Într-un mediu VR, este posibil să se simuleze relațiile și interacțiunile dintre obiecte, cum ar fi un robot care îndeplinește o sarcină. Astfel, deși ambele tehnologii pot fi utilizate pentru proiectare și simulare, tehnologia gemenilor digitali se concentrează pe considerațiile generale privind ciclul de viață, iar mediul VR se axează pe interacțiunile dintre obiectele fizice.
Un metavers combină gemenii digitali și VR într-un mediu virtual special creat, care sprijină interacțiunile în timp real dintre obiectele digitale și oameni. Acesta este asociat frecvent cu jocurile, dar se aplică din ce în ce mai mult activităților comerciale și industriale.
Bine ați venit la iguverse
Igus a dezvoltat metaversul iguverse pentru a sprijini interacțiunile inginerești în medii industriale, cum ar fi dezvoltarea și implementarea sistemelor robotizate. iguverse poate fi implementat prin intermediul software-ului Igus Robot Control (iRC). Această aplicație gratuită și fără licență permite utilizatorilor să controleze diverse tipuri de roboți, inclusiv roboți delta, coboți (brațe robotizate) și roboți gantry.
Acesta pune la dispoziția utilizatorilor o interfață 3D și peste 100 de exemple de programe. Cerințele de sistem pentru implementarea iRC includ un PC (cu procesor Intel i5, minim) cu Windows 10 sau 11 (64-biți) cu 500 MB de spațiu liber pe disc și conectivitate de rețea Ethernet sau wireless.
Geamăn digital 3D
Nucleul software-ului este un geamăn digital 3D al robotului programat. Un exemplu în acest sens este un robot de tip gantry liniar cu trei axe, precum modelul DLE-RG-0001-AC-500-500-100 cu un spațiu de lucru de 500 × 500 × 100 mm sau un actuator xy cu două axe, precum modelul DLE-LG-0012-AC-800-500 cu un spațiu de lucru de 800 × 500 mm (figura 1). Proiectanții pot defini mișcările cu câteva clicuri de mouse și pot utiliza modelul 3D pentru a se asigura că mișcările necesare sunt fezabile, chiar înainte de achiziționarea robotului.
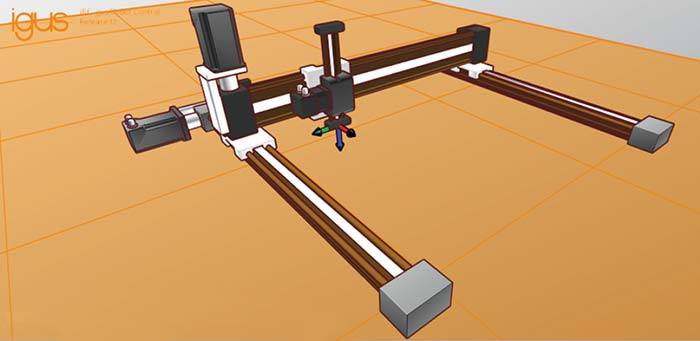
Figura 1: Exemplu de geamăn digital 3D VR al unui robot gantry cu trei axe în mediul iguverse. (Sursa imaginii: Igus)
În plus față de software-ul iRC, controlerul robotului este un element-cheie în mediul de dezvoltare iguverse. De exemplu, modelul IRC-LG12-02000 este pentru motoare de 48 V, are șapte intrări și șapte ieșiri și este prevăzut cu un cablu de 10 m pentru conectarea la robot. Controlerele IRC includ module de acționare a motoarelor pentru diferite dimensiuni de motoare pas cu pas bipolare și sunt disponibile în versiuni configurabile sau preconfigurate. De asemenea, există diverse interfețe pentru integrarea sistemului, inclusiv:
- Interfață PLC (controler logic programabil) pentru control, utilizând intrările și ieșirile digitale, în special pentru pornirea și oprirea cu ușurință a programelor prin intermediul unui PLC sau al unui buton cu revenire (push buton)
- Interfață Modbus TCP pentru control prin intermediul unui PLC sau PC
- Interfață robotică comună (CRI – Common Robotic Interface) Ethernet pentru control și configurare prin intermediul unui PLC sau PC
- Interfață pentru sistemul de operare al robotului (ROS – Robot Operating System) pentru operarea robotului utilizând ROS
- Interfață pentru camerele de detectare a obiectelor
- Interfață cloud pentru monitorizarea de la distanță a stării robotului
Cinematica acceptată
În iguverse sunt acceptate o varietate de cinematici (mișcări de bază) care definesc mișcarea controlată a robotului. În plus față de cinematica preconfigurată, în IRC pot fi configurate până la încă trei axe independente cinematic. Cinematica preconfigurată include:
- Roboți delta cu 2 axe și 3 axe
- Roboți gantry
- cu 2 axe (axele X și Y)
- cu 2 axe (axele Y și Z)
- cu 3 axe (axele X, Y și Z)
- Brațe robotice (coboți)
- cu 3 axe (axa 1, 2, 3)
- cu 3 axe (axele 2, 3, 4)
- cu 4 axe (axa 1, 2, 3, 4)
- cu 4 axe (axele 2, 3, 4, 5)
- 5-axe (axa 1 până la 5)
- 6-axe (axa 1 până la 6)
- Robot SCARA cu 4 axe
Programare ușoară pentru automatizări low-cost
Roboții Igus și IRC-urile au fost proiectați pentru a permite automatizări cu costuri reduse. Acest lucru nu ar fi posibil fără o interfață de programare ușor de utilizat. Pentru a muta și poziționa un robot în iguverse, este suficient un mouse cu 3 butoane sau un gamepad. Cu ajutorul software-ului IRC, un utilizator poate deplasa liber toate axele geamănului digital în interfața 3D. O funcție teach-in sprijină dezvoltarea de software de control al roboților, chiar și fără conectarea unui robot fizic.
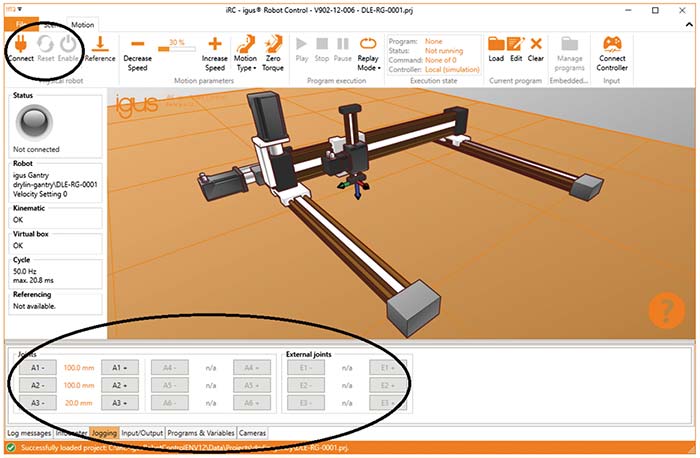
Figura 2: Tab-ul “Jogging” (stânga jos) din mediul de dezvoltare imersiv iguverse poate fi utilizat pentru a introduce profiluri de mișcare. (Sursa imaginii: Igus)
Pentru a implementa funcția teach-in, utilizatorul deplasează manual robotul virtual în poziția dorită și definește modul în care acesta se deplasează. Procesul se repetă până la crearea profilului complet de mișcare. Centrul de unelte din software-ul IRC permite utilizatorilor să adauge cu ușurință efectoare finale compatibile, cum ar fi dispozitive de prindere și ajustează automat punctul central al uneltei pe robot. În plus, se poate adăuga o conexiune la un sistem de control industrial de nivel superior.
Procesul începe prin activarea robotului folosind butoanele “connect”, “reset” și “enable”, după cum este necesar în interfață. LED-ul de stare de pe IRC ar trebui să devină verde, iar starea ar trebui să indice “No Error”. Profilul de mișcare poate fi introdus utilizând tab-ul “Jogging” (figura 2).
Roboți gantry
Roboții gantry, precum cei incluși în exemplele anterioare ale iguverse, constau din două axe X de bază, o axă Y și o axă Z opțională. Axa Y este atașată la cele două axe X paralele și se deplasează înainte și înapoi în spațiul bidimensional. Axa Z opțională susține o a treia dimensiune de mișcare.
Roboții gantry de la Igus au garnituri din plastic autolubrifiante care alunecă și se rotesc mai lin și mai silențios decât cele clasice bazate pe rulmenți cu bile. Noul design este mai ușor, rezistent la coroziune și nu necesită întreținere, aspecte importante pentru IMM-uri. De asemenea, esențial pentru IMM-uri, acești roboți costă cu aproximativ 40% mai puțin decât roboții gantry tradiționali, oferind un randament mai rapid al investiției (ROI).
Acești roboți sunt potriviți pentru două clase de aplicații: cu viteze mici și sarcini mari sau cu viteze mari și sarcini mici. Aplicațiile reprezentative includ operațiunile de ambalare, preluare și plasare, etichetare, manipulare a materialelor și asamblare.
Aceștia sunt disponibili într-o gamă largă de dimensiuni. Accesoriile disponibile includ cuplaje, efectoare terminale și flanșe de motor. Printre exemplele de roboți gantry de dimensiuni medii se numără:
- DLE-FG-0006-AC-650-650 este un robot gantry plat bidimensional cu un spațiu de lucru de 650 × 650 mm. Acest robot poate manipula sarcini utile de până la 8 kg și are o rată dinamică de până la 20 de preluări pe minut.
- DLE-RG-0012-AC-800-800-500 este un robot gantry tridimensional cu un spațiu de lucru de 800 × 800 × 500 mm. Acesta poate manipula sarcini utile de până la 10 kg, cu o rată dinamică de până la 20 de preluări pe minut.
Abilități în materie de paletizare

Figura 3: Paletizarea este o activitate comună și importantă în cadrul operațiunilor de producție și logistică și poate fi automatizată cu ajutorul unui robot gantry. (Sursa imaginii: Igus)
Paletizarea produselor pentru expediere este o activitate zilnică în operațiunile de producție și logistică. Cel mai nou și mai mare membru al iguverse este robotul XXL cu un spațiu de lucru de 2.000 × 2.000 × 1.500 mm, potrivit pentru aplicații de paletizare de până la 10 kg. Sunt disponibile modele personalizate cu spații de lucru de până la 6.000 × 6.000 × 1.500 mm.
Acești roboți gantry pot prelua piese care cântăresc până la 10 kg, le pot transporta cu o viteză de până la 500 mm/s și le pot plasa pe un palet cu o precizie de repetiție de 0,8 mm (figura 3). Soluția robotului de paletizare Igus costă cu până la 60% mai puțin decât sistemele similare.
Roboți delta

Figura 4: Exemplu de robot delta cu trei axe alături de un Igus iRC (stânga). (Sursa imaginii: DigiKey)
La fel ca roboții gantry, roboții delta sunt disponibili cu două sau trei axe. Roboții delta au un înveliș în formă de cupolă montat deasupra spațiului de lucru. Aceștia au viteze extrem de mari și sunt deseori utilizați pentru manipularea materialelor și plasarea pieselor. Iată câteva exemple de roboți delta de la Igus:
- RBTX-IGUS-0047 este un model cu trei axe cu un diametru al spațiului de lucru de 660 mm. Are o precizie de ±0,5 mm, o sarcină utilă maximă de 5 kg, o viteză maximă de 0,7 m/s și poate efectua până la 30 de preluări pe minut (figura 4).
- RBTX-IGUS-0059 este un model cu 2 axe cu un diametru al spațiului de lucru de 700 mm. De asemenea, are o precizie de ±0,5 mm. Sarcina sa utilă maximă este de 5 kg, viteza maximă este de 2 m/s și poate efectua până la 50 de preluări pe minut.
Coboți cu brațe articulate
Iguverse oferă, de asemenea, suport pentru coboți cu brațe articulate. Coboții pot avea de la două la 10 sau mai multe axe, numite și grade de libertate (DOF – Degree of Freedom). În general, aceștia au limite mari de lucru și pot efectua sarcini complexe în colaborare cu un operator. Modelul Igus REBEL-6DOF-02 are 6 DOF, iar modelul REBEL-4DOF-02 are 4 DOF. Ambele echipamente au o precizie de ±1 mm, o rază de lucru nominală de 400 mm și pot efectua un minim de 7 ridicări pe minut cu o viteză liniară de 200 mm/s.

Figura 5: Coboți cu brațe articulate cu 4 DOF (stânga) și 6 DOF (dreapta). (Sursa imaginii: Igus)
Modelul cu 6 DOF are o sarcină utilă maximă de 2 kg și o rază maximă de acțiune de 664 mm. Modelul cu 4 DOF are o sarcină utilă maximă de 3 kg și o rază maximă de acțiune de 495 mm (figura 5).
Concluzie
Metaversul industrial imersiv iguverse combină gemenii digitali și mediul VR pentru a oferi instrumente care permit dezvoltarea și implementarea rapidă a soluțiilor robotice. Este gratuit, fără licență și creat pentru a rula local pe un PC, fără o conexiune la cloud. Poate fi utilizat pentru dezvoltarea și testarea soluțiilor robotice fără ca un robot să fie prezent.
Acesta suportă o gamă largă de cinematici pentru roboți delta, gantry, brațe robotice (coboți) și roboți SCARA. IRC-ul include o serie de interfețe pentru a susține automatizarea și nevoile operaționale, inclusiv interfață PLC, Modbus TCP/IP, CRI Ethernet, interfață ROS, o interfață pentru camerele de detectare a obiectelor și o interfață Cloud. Iguverse, iRC și roboții de la Igus au fost optimizați pentru a răspunde nevoilor de automatizare economice specifice IMM-urilor.
 Autor: Rolf Horn – Inginer de aplicații
Autor: Rolf Horn – Inginer de aplicații
Rolf Horn, inginer de aplicații la DigiKey, face parte din grupul european de asistență tehnică din 2014, având responsabilitatea principală de a răspunde la orice întrebări legate de dezvoltare și inginerie de la clienții finali din EMEA, precum și de a scrie și corecta articole și bloguri în limba germană pe platformele TechForum și maker.io ale DK. Înainte de DigiKey, a lucrat la mai mulți producători din domeniul semiconductorilor, axându-se pe sisteme embedded FPGA, microcontrolere și procesoare pentru aplicații industriale și auto. Rolf deține o diplomă în inginerie electrică și electronică de la Universitatea de Științe Aplicate din München, Bavaria și și-a început cariera profesională la un distribuitor local de produse electronice în calitate de arhitect de soluții de sistem pentru a-și împărtăși cunoștințele și expertiza în continuă creștere în calitate de consilier de încredere. Hobby-uri: petrecerea timpului cu familia + prietenii, călătoriile cu autorulota personală VW-California și plimbarea cu motocicleta, un BMW GS 100 din 1988.
DigiKey | https://www.digikey.ro
![]()