

Visul oricărui inginer care proiectează un invertor cu 3 faze pentru un motor de curent alternativ fără perii, este de a obține rapid o soluție care funcționează, acordată la motorul său specific. Dar, aceasta este o experiență dificilă pentru a obține parametrii intrinseci pentru un motor AC fără perii, personalizat. Mai mult decât atât, calibrarea coeficienților încorporați în software necesită o expertiză și eforturi, pentru a ajunge la comportamentul așteptat de la sistem.

Autor: Vincent Mignard, Renesas
Deoarece fiecare motor și echipament au propriile lor specificații tehnice în ceea ce privește viteza, cuplul, timpul de reacție și eficiența, inginerii trebuie să facă un efort continuu pentru a încorpora noi motoare și echipamentele lor electronice. Renesas oferă acum un instrument de vis și o îmbunătățire a existentului kit de control al motorului – RX62, kit de referință, (cod: YROTATE – IT – RX62T) și, recent, o nouă ofertă de referință, kit-ul de control al motorului – RX220, (cod: YROTATE – IT – RX220). Ambele kit-uri sunt concepute pentru a controla orice motoare de curent alternativ cu magnet permanent, folosind un algoritm de control prin senzori de orientare a câmpului magnetic.
Software-ul care rulează pe RX62T foloseşte aritmetica în virgulă mobilă, iar pe RX220, foloseşte aritmetica în virgulă fixă. Fiecare kit se bazează pe un singur circuit imprimat folosind un microcontroler (MCU) pe 32 de biți (RX62T sau RX220), un etaj de putere folosind MOSFET-uri și șunturi de curent ca senzori de control. Software-ul încorporat este gratuit (royalty free) și folosește o mică zonă de memorie flash și resurse minime ale CPU.
Interdependența dintre hardware-ul de dezvoltare și un motor se face ușor folosind o interfață grafică foarte bogată în caracteristici, PC Graphical User Interface (PC GUI). În cele din urmă, PC GUI permite: măsurarea automată a parametrilor unui motor fără perii, calibrarea coeficienților de control Proporțional/Integral ai curentului și garantarea unui proces de start-up în condiții de siguranță și de încredere. Având toate acestea, haideți să încercăm să înțelegem de ce kit-urile și interfața PC GUI asociată pot îndeplini visul oricărui inginer în dezvoltarea de noi invertoare electronice.
Software-ul de control integrat și interfața pentru utilizator – PC GUI, au două avantaje cheie de care să țineți seama:
1) Tuning-ul coeficienţilor PI (Proportional-Integral) de control al curentului: Acordarea pentru controlul PI necesită în mod normal utilizarea unui osciloscop și generarea de către sistem a unei variații de tip treaptă de curent, în scopul de a analiza răspunsul la acest stimul. O astfel de caracteristică a fost prevăzută în urmă cu câțiva ani pentru kit-urile Renesas, dar acesta este un proces manual și consumator de timp. Instrumentul de proiectare Renesas permite ca un control PI pentru un motor să fie acordat ușor și rapid, folosind pur și simplu o placă cu invertor conectată la motor împreună cu PC-ul. În primul rând, se realizează detectarea automată a valorilor corecte ale constantelor PI. Se oferă astfel utilizatorului valorile de lucru ale constantelor PI pentru curent. În al doilea rând, utilizatorul poate rafina acordarea prin impunerea unei trepte de curent la o valoare dorită și apoi să analizeze răspunsul sistemului direct în interfața cu utilizatorul, fără a fi nevoie de un osciloscop scump, un depanator și un transformator de izolare.
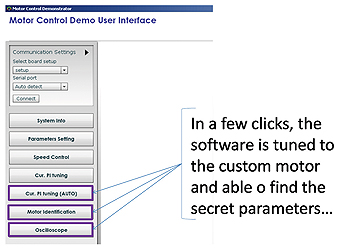
2) Auto-detectarea parametrilor motorului: În mod implicit, parametrii modelului matematic ai motorului trebuie să aibă valori definite inițial, în scopul de a începe și a rula algoritmul de sesizare sinusoidal. Cei mai importanți parametri sunt: rezistența statorului, inductanța sincronă și legăturile de flux magnetic permanent (de exemplu, Forța Electromotoare de reacție). Măsurarea acestor parametri este complexă și necesită de obicei un laborator complet echipat cu instrumente specifice. Folosind noul instrument de proiectare a motoarelor de la Renesas, valorile acestor parametri sunt identificate automat chiar de invertorul cu 3 faze. Interfața utilizatorului cu PC-ul afișează valorile măsurate în câteva click-uri de mouse.
Notă: În cazul motoarelor non-izotrope, este furnizată valoarea medie pe două axe Ld și Lq a inductanţei.
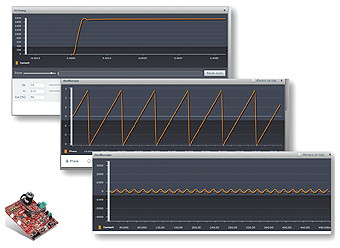
Platformele de referință RX62T și RX220 oferă o conexiune USB complet izolată la PC, astfel încât în acest moment nu este nevoie de niciun transformator de izolare. Interfața grafică între utilizator și PC este capabilă să afișeze toate valorile interne ale algoritmului și este posibilă vizualizarea răspunsului PI la variația treaptă de curent, faza sistemului și formele de undă sinusoidale ale curentului, așa cum se arată în Figura 1.
PC GUI oferă trei funcții principale care permit calibrarea completă în 45 de secunde. Prima dintre ele este cea de auto-acordare de tip PI a curentului, a doua este identificarea parametrilor motorului și a treia este imaginea tip fereastră osciloscop, așa cum se arată în Figura 2. Cei cinci parametri extrași în timpul procesului de auto-acordare pot fi stocați în memoria EEPROM printr-un simplu click de mouse.
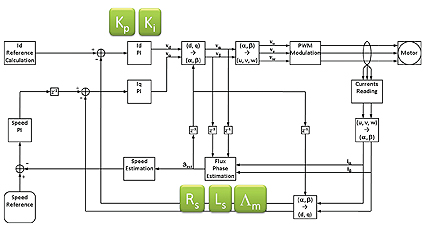
Să intrăm acum în mecanismele tehnice concepute pentru a descoperi cei cinci parametri principali. Structura cu blocuri afișate din figura 3, face o buclă externă de viteză care produce referința cuplului. Două bucle interne de curent produc referințe de tensiune, care sunt aplicate la invertorul cu 3 faze.
Folosind transformările sistemelor de referință, controlul de cuplu și controlul de flux sunt decuplate. O mare parte a algoritmului constă în schimbările sistemelor de referință, în particular, schimbarea între referința sistemului bidimensional legat de stator și sistemul bidimensional legat de rotor. Primul sistem este staționar, al doilea este de obicei în rotație, iar transformarea se numește PARK transform și necesită poziția unghiulară a rotorului în ceea ce privește statorul. Această poziţie este poziția vectorului flux, dat de magneții permanenți. Pentru a se calcula într-un sistem de senzori, sunt efectuate mai multe operații folosind ecuațiile modelului motorului.
Buclele de control sunt realizate folosind controlul PI standard, care reglementează curenții. Aceasta este partea fundamentală a algoritmului de control al motorului, folosit pentru a controla curentul livrat la faza motorului. Controlerul PI este proiectat să producă un semnal de ieșire compozit, pentru a compensa eroarea.
Cei doi termeni ai controlerelor depind de coeficienții Proporționali – Kp și coeficienții Integral – Ki. Algoritmul PI creează o formă de undă pentru tensiune, în așa fel încât curentul rezultat are forma de undă dorită. Aceasta se obține comparând ieșirea actuală a sistemului produsă efectiv, cu cea dorită, și construind o intrare pentru sistem adecvată, bazată pe eroarea în sine. Intrarea pentru sistem este compusă din doi termeni, unul proporțional cu eroarea, iar cel de al doilea proporțional cu integrala erorii.
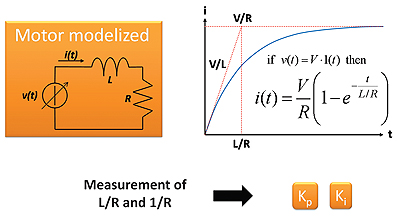
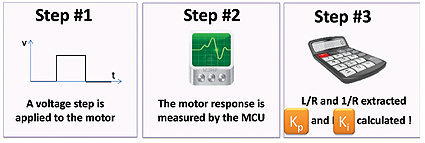
Pentru a regla orice motor de curent alternativ fără perii, trebuie să fie obținute valorile Kp și Ki. În acest caz, sistemul de control poate fi privit ca un circuit RL. De aceea, modelul de motor din figura 4, a creat cu v(t) generat de controlerul PI, o inductanță și o rezistență care permit măsurătorile indirecte ale coeficienților necunoscuți.
Răspunsul măsurat al circuitului este reprezentat pe partea stângă. Cei doi coeficienți notați “L/R” și “1/R” trebuie să fie măsurați, în scopul de a afla coeficienții Kp și Ki. Răspunsul așteptat al sistemului are o variație bine cunoscută. Deci, devine posibil să obținem de la sistemul în buclă închisă, a celor doi coeficienți, Kp și Ki prin măsurare: câștigul în starea de echilibru și constanta de timp a circuitului echivalent RL.
Figura 5 prezintă etapele utilizate pentru a măsura cele două rapoarte și calcula coeficienții PI necunoscuți.
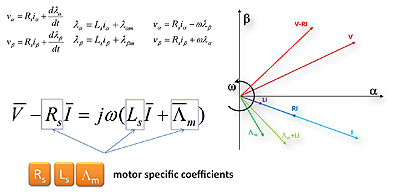
O astfel de abordare este rapidă și implementată de ambele familii de microcontrolere: RX62T și RX220. Se evită orice consum de timp pentru calcul manual și experimentare și procesare de eroare. Alt beneficiu al celui mai nou software încorporat este identificarea automată a parametrilor de motor fără perii. În schema bloc a algoritmului de control, Blocul Estimare de Fază (Phase Estimation Block) folosește parametrii modelului de motor pentru a rula corect. Cei trei parametri sunt: rezistența statorului – Rs, inductanța sincronă – Ls și amplitudinea fluxului magneților permanenți – Lm. Figura 6 prezintă ecuațiile motorului utilizate în programul software încorporat în blocul de estimare a fluxului. Modelul utilizat aici se referă la stator. După mai multe simplificări, în ecuația vectorială finală, apar parametrii necunoscuți.
În cazul în care software-ul încorporat oferă o tensiune sinusoidală la o anumită frecvență, și se măsoară curentul obținut, toate cantitățile din ecuație sunt cunoscute, cu excepția celor trei coeficienți.
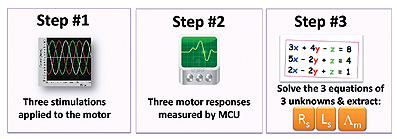
Deci, procedura implementată constă în stimularea fazelor motorului, cu tensiune având diferite forme de undă și măsurarea curenților corespunzători.
Ultimul pas este de a rezolva un sistem algebric de trei ecuații cu trei necunoscute, așa cum se arată în Figura 7.
Datorită puternicei interfețe PC GUI, procesul durează 45 secunde pentru a extrage cinci parametri: Kp, Ki, Rs, Ls și Lm, controlând în cele din urmă un motor necunoscut de tip AC fără perii, cu 3 faze. O astfel de procedură nu are nevoie de echipamente specifice sau instrumente scumpe. Nu este necesar un transformator de izolare specific și o astfel de auto-acordare este utilizabilă pentru motoare de joasă cât și de înaltă tensiune. Ea se potrivește ușor pentru a evalua diferite motoare în câteva minute pentru fiecare cerință a unui echipament.
Nu există nicio teamă atunci când se începe o proiectare de invertor cu 3 faze, având un astfel de instrument ce permite ca orice inginer să controleze propriul motor în mai puțin de un minut și astfel să poată aloca timpul pentru dezvoltarea de aplicații. Niciun know-how profund nu mai este necesar, pentru a scurta timpul de învățare global și timpul pentru a lansa pe piață primul prototip. În cele din urmă, procedura se face off-line și necesită doar câteva MIPS-uri executate de MCU și arie mică de memorie. Până la treizeci de tipuri de motoare de curent alternativ fără perii au fost acordate cu ajutorul puternicei soluții de auto-acordare care rulează pe familiile de microcontrolere RX220 sau RX62T.
Ambele platforme de referință sunt capabile de a comanda motoare de 24VDC și pot controla motoare de mai mulți kilowați, folosind un etaj de putere externă. Acum, aceasta este o oportunitate pentru voi de a încerca cea mai recentă soluție Renesas, comandând kit-urile:
• Pentru RX62T, care integrează unitatea de calcul în virgulă mobilă: YROTATE-IT-RX62T
• Pentru RX220, folosind aritmetică în virgulă fixă: YROTATE-IT-RX220
Ambele kit-uri livrate de Renesas sunt oferite la un preţ sub 200 € per kit și răspund nevoii pentru un proiect de referință capabil de a comanda foarte repede motoare fără perii.
Cuvinte cheie: control PI, auto-acordare, PC GUI, motoare fără perii, motoare cu magneți permanenți, senzori de orientare a fluxului magnetic, software încorporat gratuit, RX220, RX62T, rezistența statorului, inductanța sincronă, flux magnet permanent.
URL-uri legate de articol:
Renesas RX MCU Family: www.rxmcu.com
RX62T Group: www.renesas.eu/products/mpumcu/rx/rx600/rx62t/index.jsp
RX63T Group: www.renesas.eu/products/mpumcu/rx/rx600/rx63t/index.jsp
Renesas
www.renesas.com