


Figura 1: Industria auto, poate mai mult decât oricare altă industrie, a stimulat progresul tehnologiilor robotice. (Sursa imaginii: Getty Images)
Roboții industriali sunt esențiali pentru producția modernă — executând o gamă largă de funcții, coordonând în același timp sarcinile cu alte forme de automatizare. De fapt, industria auto, în valoare de 1T USD, a fost prima industrie care a dispus de mijloacele necesare pentru a utiliza pe scară largă robotica … precum și pentru a dezvolta tehnologiile asociate cu robotica. Nu este de mirare, deoarece automobilele sunt produse de mare valoare extrem de sofisticate, putând justifica investiții în instalații a căror amortizare ar putea să nu se producă decât peste ani. În prezent, majoritatea covârșitoare a centrelor de producție auto utilizează robotica. Abia în ultimele două decenii, packaging-ul industrial, producția de semiconductori și domeniul, relativ nou, al depozitării automate au accelerat adoptarea roboticii pentru a rivaliza cu industria auto.
În cadrul roboților în sine și în echipamentele complementare pentru automatizări industriale se află motoare electrice, sisteme hidraulice și sisteme de alimentare cu fluide; acționări, comenzi, hardware de rețea, interfețe om-mașină (HMI) și sisteme software, precum și componente de detecție, feedback și siguranță. Aceste elemente conferă eficiență prin executarea unor rutine preprogramate care se pot adapta cu ușurință la condițiile schimbătoare în timp real. Din ce în ce mai mult, este de așteptat ca celulele de lucru robotizate să aibă, de asemenea, posibilitatea de reconfigurare pentru a produce noi modele de automobile… deoarece preferințele consumatorilor au ajuns să evolueze mai rapid ca oricând.
Explicarea terminologiei utilizate pentru automatizări și robotică
“Oxford English Dictionary” definește roboții ca fiind “mașini capabile să efectueze automat serii complexe de mișcări, în special programabile”. Ceea ce încurcă lucrurile este că această definiție ar putea descrie orice, de la mașini de spălat până la mașini-unelte CNC. Chiar și definiția ISO 8373 a robotului ca fiind un “manipulator multifuncțional, reprogramabil, cu control automat, programabil pe trei sau mai multe axe” ar putea descrie o bandă transportoare a unui depozit cu lifturi de ridicare pe verticală. Cu toate acestea, asemenea utilaje nu vor fi niciodată clasificate ca fiind roboți.
Diferențiatorul practic care trebuie reținut este că mașinile construite pentru o singură utilizare [a se citi: foarte precis definită] într-o locație fixă nu sunt, de obicei, considerate roboți … cel puțin nu în cercurile industriale. De exemplu, deși o mașină de frezat, tipică, poate rula un număr nelimitat de programe complexe pentru a prelucra diferite piese, aceasta este proiectată pentru a tăia metalul cu ajutorul unor lame rotative montate pe axul său … și este probabil să rămână fixată într-un singur loc pentru întreaga sa durată de viață.

Figura 2: În unele cazuri, distincția dintre robot și mașină se bazează pe felul în care arată un proiect automatizat. Unii clasifică brațele articulate mecanizate, care seamănă cu brațele umane, drept roboți — și clasifică acest ansamblu cartezian automatizat de glisiere liniare (precum CT4 pentru asamblarea și inspecția pieselor mici) drept mașini. (Sursa imaginii: IAI America Inc.)
Uneori, chiar și aceste definiții sunt contrazise. De exemplu, mașinile automate, cum ar fi mașinile-unelte cu comandă numerică, sunt din ce în ce mai flexibile, în contextul în care centrele de strunjire-frezare îndeplinesc atât rolul de mașini de frezat, cât și de strunguri — iar multe astfel de mașini execută și sarcini de inspecție și măsurare a pieselor cu ajutorul sondelor de contact și al scanerelor laser. Astfel de mașini-unelte pot fi echipate chiar și pentru a efectua operațiuni de fabricare aditivă. (n.red.: Fabricarea aditivă (AM – Additive Manufacturing), cunoscută și sub numele de imprimare 3D, este un proces de producție industrială prin intermediul căruia se creează obiecte tridimensionale prin depunerea de material, de obicei în straturi). Pe de altă parte, roboții industriali, care se presupune că sunt flexibili, sunt adesea furnizați ca modele specializate proiectate pentru o sarcină specifică, cum ar fi pulverizarea vopselei sau sudarea… și este foarte posibil să își petreacă întreaga durată de viață în cadrul unei celule de lucru pe o linie de producție.
Concluzia este că, în prezent, în industria automobilelor, sistemele automatizate clasificate ca roboți sunt într-adevăr adesea așteptate să prezinte o flexibilitate ridicată — capabile (cu reconfigurare) să execute sarcini de transport, sortare, asamblare, sudare și vopsire care pot varia de la o zi la alta. De asemenea, se așteaptă ca acești roboți industriali să poată fi relocați în zone noi dintr-o fabrică — fie pentru redistribuire ca sisteme de fabricație și reconfigurate, fie pentru a se deplasa continuu pe șine liniare pe axa a șaptea pentru a deservi rețelele de celule de lucru dintr-o linie.
Familii de roboți pentru unitățile de producție auto
Roboții din unitățile de producție de automobile sunt clasificați, în linii mari, în funcție de structurile lor mecanice — inclusiv tipurile de articulații, mecanismele de legătură și gradele de libertate.

Figura 3: Roboții colaborativi sunt din ce în ce mai des întâlniți în unitățile furnizorilor de automobile Tier-2 care beneficiază de paletizare automată. (Sursa imaginii: Dobot)
Roboții manipulatori seriali includ majoritatea roboților industriali. Modelele din această familie dispun de un lanț cinematic liniar format din elemente de legătură cu o bază la un capăt și un efector final (mecanism de prehensiune) la celălalt capăt … cu o singură articulație între fiecare element de legătură din lanț. Printre aceste modele se numără roboții articulați, roboții tip SCARA (Selective Compliance Articulated Robot Arm), roboții colaborativi cu șase axe, roboții cartezieni (care constau, în esență, din actuatoare liniare) și roboții cilindrici (oarecum, mai puțin cunoscuți).
Roboții manipulatori paraleli excelează acolo unde aplicațiile necesită înaltă rigiditate și viteză operațională. Spre deosebire de brațele articulate (suspendate în spațiul 3D, care utilizează o singură linie de legături), manipulatorii paraleli sunt suspendați sau susținuți folosind rețele de legături. Printre exemple se numără roboții Delta și Stuart.
Roboții mobili sunt unități pe roți care deplasează materiale și articole din stoc în fabrici și depozite. Aceștia pot funcționa ca stivuitoare automate pentru a prelua, deplasa și așeza paleții pe rafturi sau pe podeaua fabricii. Printre exemple se numără vehiculele cu ghidare automată (AGV) și roboții mobili autonomi (AMR).
Utilizări clasice ale roboților în producția de automobile
Aplicațiile clasice ale roboților în unitățile de producție de automobile includ sudarea, vopsirea, asamblarea și (pentru transportul celor aproximativ 30.000 de piese care intră în componența unui automobil obișnuit) sarcini de manipulare a materialelor. Gândiți-vă la cum sunt utilizate unele subtipuri de roboți în astfel de aplicații.
Roboții cu braț articulat cu șase axe sunt manipulatori seriali în care fiecare articulație este o articulație rotativă. Cea mai comună configurație este robotul cu șase axe care are grade de libertate pentru a poziționa obiecte în orice poziție și orientare în cadrul volumului său de lucru. Aceștia sunt roboți foarte flexibili, potriviți pentru o multitudine de procese industriale. De fapt, roboții cu braț articulat cu șase axe sunt ceea ce își imaginează majoritatea oamenilor atunci când se gândesc la un robot industrial.

Figura 4: Cititoarele de coduri de bare de înaltă performanță pot decoda rapid și fiabil codurile de bare 1D și 2D. Unele se montează pe efectorii finali ai roboților pentru a permite preluarea pieselor electronice și auto, precum și a diferitelor subansamble. (Sursa imaginii: Omron Automation and Safety)
De fapt, roboții mari cu șase axe sunt adesea utilizați la sudarea structurilor de automobile și la sudarea prin puncte a panourilor caroseriei. Spre deosebire de abordările manuale, roboții au abilitatea de a urmări cu precizie traseele de sudură în spațiu 3D fără a se opri, adaptându-se în același timp la schimbarea parametrilor cordonului de sudură, ca răspuns la condițiile de mediu.
În alte părți, roboții cu braț articulat cu șase axe se deplasează pe sisteme dotate cu a șaptea axă pentru a executa procese de amorsare, vopsire, acoperire transparentă și alte procese de etanșare a caroseriilor automobilelor. Astfel de sisteme oferă rezultate fără cusur și foarte fiabile, deoarece aceste procese sunt executate în cabine de pulverizare bine izolate și lipsite de particule poluante provenite din mediul exterior. Roboții cu șase axe urmează, de asemenea, trasee de pulverizare optimizate prin programare pentru finisaje perfecte, reducând la minimum excesul de pulverizare, risipa de vopsea și de soluții de etanșare. Mai mult, aceștia elimină necesitatea de a expune personalul uzinei de automobile la vaporii nocivi asociați cu unele substanțe aplicate prin pulverizare.

Figura 5: Acești roboți cu șase axe sunt ceea ce își imaginează majoritatea oamenilor atunci când se gândesc la un robot industrial. (Sursa imaginii: Kuka)
Roboții SCARA (Selective Compliance Articulated Robot Arm) au două articulații rotative cu axe de rotație paralele care se deplasează pe verticală pentru poziționarea X-Y într-un singur plan de mișcare. Apoi, o a treia axă liniară permite deplasarea în direcția Z (în sus și în jos). SCARA sunt opțiuni relativ ieftine care excelează în spații restrânse – chiar și în timp ce oferă mișcări mai rapide decât roboții cartezieni echivalenți. Nu este de mirare că roboții SCARA sunt utilizați în producția de sisteme electronice și electrice pentru automobile — inclusiv cele pentru controlul climatizării, conectivitatea dispozitivelor mobile, elemente audio/vizuale, divertisment și navigație. Aici, roboții SCARA sunt cel mai frecvent utilizați pentru a executa sarcini precise de manipulare a materialelor și de asamblare pentru a produce aceste sisteme.
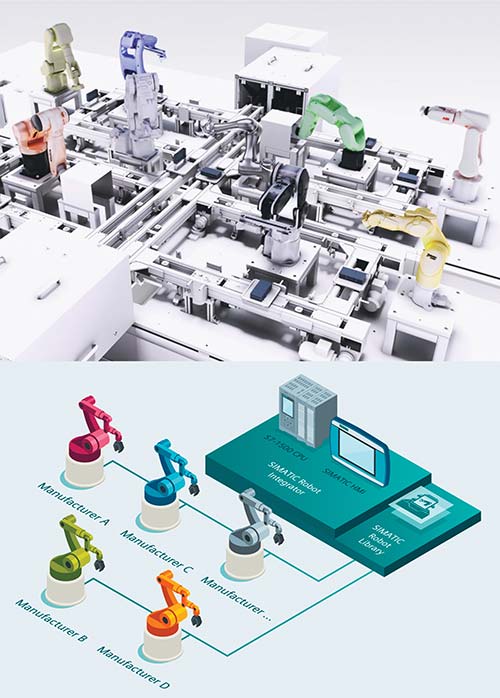
Figura 6: Aplicația SIMATIC Robot Integrator simplifică integrarea roboților în sistemele automatizate prin adaptarea parametrilor roboților diferiților furnizori și a diferitelor geometrii și cerințe de montare ale aplicațiilor; aceste sisteme sunt însoțite de controlere SIMATIC S7 scalabile și de înaltă performanță, cu I/O integrate și diverse opțiuni de comunicație pentru adaptări flexibile ale proiectului. (Sursa imaginii: Siemens)
Roboții cartezieni au, cel puțin, trei axe liniare suprapuse pentru a executa mișcări în direcțiile X, Y și Z. De fapt, unii roboți cartezieni utilizați de furnizorii de automobile Tier 2 iau forma unor mașini-unelte CNC, imprimante 3D și mașini de măsurat în coordonate (CMM) pentru a testa calitatea și consistența produselor finale. Dacă punem la socoteală și aceste mașini, roboții cartezieni sunt, cu siguranță, cea mai comună formă de robot industrial din industrie. Totuși, așa cum am menționat mai devreme, mașinile carteziene sunt adesea numite roboți doar atunci când sunt utilizate pentru operațiuni care implică manipularea pieselor de lucru și nu a sculelor — în asamblare, pick-and-place și paletizare, de exemplu.
O altă variantă de robot cartezian utilizată în industria auto este macaraua automată de tip portic. Aceasta este indispensabilă pentru procesele de fixare și îmbinare care necesită acces la partea inferioară a trenului de rulare al ansamblurilor de vehicule parțial finalizate.
Utilizări noi și inedite ale roboților în producția de automobile
Roboții cilindrici sunt roboți compacți și economici care oferă poziționare pe trei axe, cu o articulație rotativă la bază și două axe liniare pentru înălțime și extensii ale brațului. Aceștia sunt deosebit de potriviți pentru manipularea mașinilor, ambalarea și paletizarea subcomponentelor auto.
Roboții colaborativi cu șase axe (coboți) menționați anterior prezintă aceeași structură de bază a conexiunilor ca și variantele industriale mai mari, dar cu acționări motorizate extrem de compacte și integrate la fiecare articulație… de obicei sub forma unui motor cu angrenaje sau a unei opțiuni de transmisie directă. În mediul auto, aceștia au sarcina de a suda consolele, suporturile și cadrele secundare complicate din punct de vedere al geometriei. Printre beneficii se numără precizia și repetabilitatea ridicată.
Roboții Delta au trei brațe care sunt acționate prin intermediul articulațiilor rotative de la bază – adesea montate pe tavan pentru un aranjament suspendat. Fiecare braț, construit pe principiul paralelogramului, dispune de articulații universale montate la capătul său, iar toate aceste paralelograme se conectează, ulterior, la efectorul final. Astfel, robotul Delta are de trei grade de libertate de translație, iar efectorul final nu se rotește niciodată în raport cu baza. Roboții Delta pot atinge accelerații extrem de mari, ceea ce îi face extrem de eficienți pentru operațiunile de preluare și plasare în aplicații care implică sortarea și alte manipulări ale elementelor de fixare mici pentru automobile și ale componentelor electrice.
Platformele Stewart (denumite și hexapode) sunt formate dintr-o bază triunghiulară și un efector final triunghiular conectate prin șase actuatoare liniare într-un octaedru. Acest lucru conferă șase grade de libertate cu o structură extrem de rigidă. Cu toate acestea, domeniul de mișcare este relativ limitat în comparație cu dimensiunea structurii. Platformele Stewart sunt utilizate pentru simularea mișcărilor, prelucrarea mobilă de precizie, compensarea mișcărilor macaralelor și compensarea vibrațiilor de mare viteză în cadrul rutinelor de testare a fizicii de precizie și a opticii … inclusiv cele de verificare a modelelor de suspensie a vehiculelor.
Vehiculele cu ghidare automată (AGV) urmează rute prestabilite, marcate de linii vopsite pe podea, cabluri pe podea sau alte indicatoare de ghidare. AGV-urile au, de obicei, un anumit grad de inteligență, astfel încât se opresc și pornesc pentru a evita coliziunile între ele și cu oamenii. Acestea sunt foarte potrivite pentru sarcinile de transport de materiale în unitățile de producție de automobile.
Roboții mobili autonomi (AMR) nu au nevoie de rute fixe și sunt capabili să ia decizii mai sofisticate decât AGV-urile. Deosebit de utili în depozitele întinse ale producătorilor de automobile, aceștia navighează liber, de obicei, folosind scanere laser și algoritmi de recunoaștere a obiectelor pentru a detecta mediul înconjurător. Atunci când este detectată o posibilă coliziune, în loc să se oprească și să aștepte ca un AGV, AMR-urile pot, pur și simplu, să-și modifice cursul și să se deplaseze pe lângă obstacole. Această adaptabilitate face ca AMR-urile să fie mult mai productive și mai flexibile în docurile de încărcare ale fabricilor de automobile.
Concluzie
Industria auto a stimulat o inovare masivă în domeniul roboticii în ultimii 30 de ani, iar această tendință va continua odată cu piața în plină expansiune a vehiculelor electrice (VE). De asemenea, industria a început să beneficieze de noi adaptări ale inteligenței artificiale și ale viziunii automate pentru a îmbunătăți instalațiile robotice pentru utilizări de toate tipurile.
 Autor: Rolf Horn – Inginer de aplicații
Autor: Rolf Horn – Inginer de aplicații
Rolf face parte din grupul European de Asistență Tehnică din 2014, având responsabilitatea principală de a răspunde la întrebările venite din partea clienților finali din EMEA referitoare la Dezvoltare și Inginerie. Înainte de Digi-Key, el a lucrat la mai mulți producători din zona semiconductorilor, cu accent pe sistemele embedded ce conțin FPGA-uri, microcontrolere și procesoare pentru aplicații industriale și auto. Rolf este licențiat în inginerie electrică și electronică la Universitatea de Științe Aplicate din Munchen, Bavaria.
Digi-Key Electronics | https://www.digikey.ro
![]()