

 Prin urmare, senzorii auto sunt esențiali pentru a îmbunătăți siguranța traficului rutier și pentru a atinge niveluri ridicate de conducere autonomă. Utilizarea lor va contribui la reducerea numărului de accidente rutiere și de decese pe șoselele din întreaga lume, obiectivul final stabilit de ‘Vision 0’: Zero decese în accidente rutiere până în 2050.
Prin urmare, senzorii auto sunt esențiali pentru a îmbunătăți siguranța traficului rutier și pentru a atinge niveluri ridicate de conducere autonomă. Utilizarea lor va contribui la reducerea numărului de accidente rutiere și de decese pe șoselele din întreaga lume, obiectivul final stabilit de ‘Vision 0’: Zero decese în accidente rutiere până în 2050.
Printre senzorii care sunt luați în considerare pentru conducerea asistată și autonomă, senzorul radar s-a dovedit a fi extrem de fiabil pentru aplicațiile ADAS, cum ar fi controlul adaptiv al vitezei de croazieră. Se preconizează că aplicațiile pentru senzorii radar se vor extinde în viitor, deoarece aceștia sunt deseori utilizați împreună cu alte tehnologii de detecție, cum ar fi camerele video și LiDAR. Avantajele și dezavantajele diverselor tipuri de senzori sunt rezumate în tabelul de mai jos. Conducerea complet autonomă va necesita, cel mai probabil, fuziunea datelor obținute din diferite tehnologii de detecție. Cu ajutorul senzorilor distribuiți în jurul mașinii, va fi posibil să se asigure o acoperire completă 360°, creându-se un “cocon” de siguranță în jurul mașinii. Figura 1 ilustrează conceptul, atunci când se iau în considerare doar senzorii radar.
Avantajele și dezavantajele diferitelor tehnologii de senzori pentru aplicațiile auto:
| PRO | CONTRA | |
| Imagistică optică (video) | Câmp vizual mare Rezoluție înaltă |
Limitată de condițiile meteorologice și de lumină Volum mare de procesare |
| Cu ultrasunete | Funcționare în toate condițiile meteorologice și de lumină Cost foarte scăzut |
Rază de acțiune foarte scurtă |
| Infraroșu | Funcționare în condiții de iluminare slabă | Rază de detecție scurtă |
| LiDAR | Precizie ridicată (rază de acțiune, rezoluție și poziție) | Limitată de condițiile meteorologice (ceață, zăpadă) Nu există informații directe despre viteză |
| Radar | Mai puțin sensibil la condițiile meteorologice Rază de detecție lungă Rezoluție și estimare bună a poziției |
Măsurare complexă a unghiurilor Clasificare complexă a țintelor Nu este suficient de avansat pentru a fi complet AD |
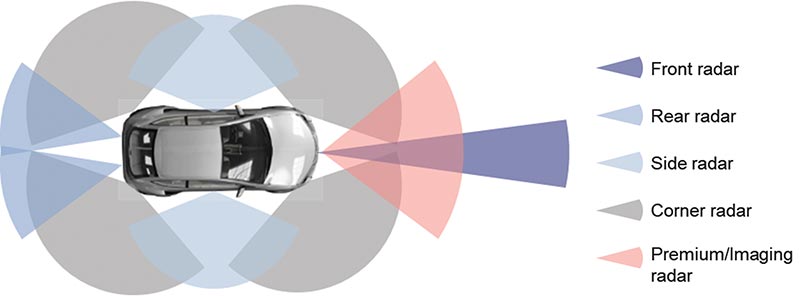
Figura 1: Amplasarea senzorilor radar pe o mașină pentru o acoperire 360°. (© Renesas)
Un avantaj suplimentar oferit de senzorii radar este că pot fi instalați cu ușurință în spatele unor elemente comune ale mașinii (bare de protecție sau ornamente), astfel încât “să fie invizibili” și să nu afecteze aspectul estetic. Banda de frecvențe de la 76 GHz la 81 GHz a fost acceptată de majoritatea țărilor ca bandă de frecvențe pentru radarele auto. Integrarea fizică devine mai ușoară odată cu frecvențele înalte de operare, deoarece dimensiunea antenelor radar va fi redusă. Cu toate acestea, apar noi provocări atunci când se “urcă” în frecvență, din cauza compromisurilor în ceea ce privește puterea, a pierderilor mai mari și a impactului mai mare al toleranțelor de fabricație.
Radarul este, de asemenea, deosebit de potrivit pentru aplicațiile auto, deoarece vehiculele reflectă foarte bine undele radar. Acesta poate fi utilizat atât pentru funcții de “confort”, cum ar fi controlul automat al vitezei de croazieră, dar și pentru aplicații de detecție de înaltă rezoluție, care contribuie la siguranța pasivă și activă a unui vehicul. Printre exemple se numără detectarea unghiului mort, asistența la schimbarea benzii de rulare și alertarea la traversarea șoselei prin spatele autovehiculului, detectarea pietonilor și a bicicletelor în apropierea vehiculului.
În prezent, senzorii radar pot fi clasificați în funcție de raza de detecție, așa cum se arată în figura 2.
- Radar cu rază scurtă de acțiune (SRR − Short Range Radar): până la 50 m, câmp vizual larg și rezoluție ridicată
- Radar cu rază medie de acțiune (MRR − Mid-Range Radar): până la 100 m, câmp vizual mediu
- Radar cu rază lungă de acțiune (LRR − Long Range Radar): rază de acțiune de 250 m sau mai mult, câmp vizual mai îngust și mai puțin axat pe rezoluție
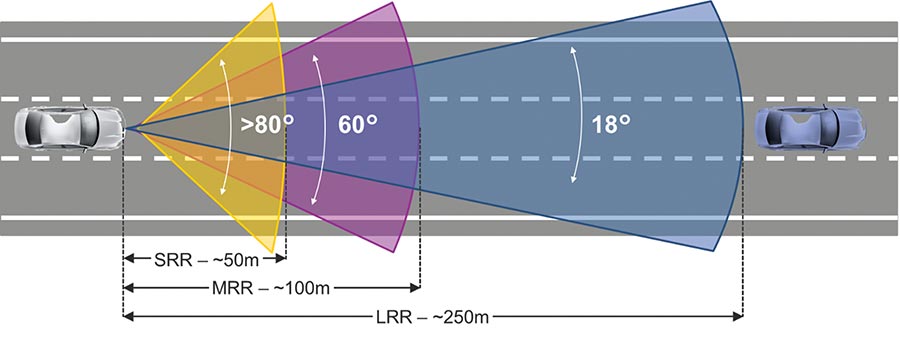
Figura 2: Clasificare în funcție de raza de acțiune a radarelor auto. (© Renesas)
Odată cu dezvoltarea noilor tehnologii, se așteaptă ca raza de acțiune să se extindă dincolo de aceste limite, concomitent cu adăugarea dimensiunii verticale la detecție, pentru a oferi o imagine 3D completă a împrejurimilor.
În viitor, pe automobile vor fi adăugate mai multe module radar, pentru a trece de la o configurație radar de bază cu vizibilitate frontală, care asigură o conducere autonomă de bază de nivel 1, la nivelul 4, conform NCAP (programul de evaluare a automobilelor noi). În curând, tot mai multe automobile vor fi echipate cu senzori radar unghi, pentru a atinge nivelul 2+ de conducere autonomă și NCAP 4-5 − în cazul automobilelor standard − și nivelul 3-4 de conducere autonomă și NCAP 5 pentru segmentul premium (figura 3).
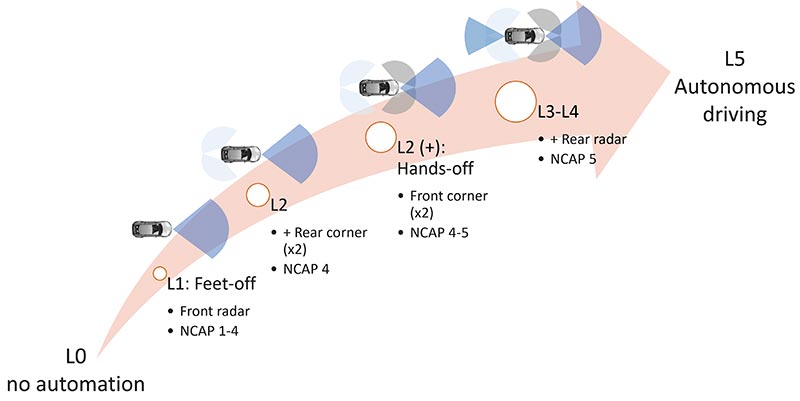
Figura 3: Senzori radar auto pentru diferite tipuri de programe NCAP și niveluri de conducere autonomă. (© Renesas)
Cu toate acestea, modul în care vor fi gestionate datele radar va depinde în mare măsură de arhitectura vehiculelor. Tendințele actuale de creștere a performanțelor unităților centrale de calcul determină, de asemenea, o evoluție a arhitecturii E/E la bordul vehiculelor către o arhitectură distribuită. Deși migrarea către o arhitectură complet distribuită nu va fi finalizată până în anii 2030, implementări parțiale vor apărea pe piață mai devreme. Pentru început, unele controlere de domeniu vor fi utilizate pentru funcții specifice, cum ar fi ADAS. Apoi, numărul controlerelor de domeniu va crește, urmând ca, de-a lungul timpului, să fie introduse și controlerele de zonă, înainte de a se stabili o arhitectură E/E complet centralizată, în care calculatorul central al vehiculului va fi conectat la senzori prin intermediul unităților de control zonale. Această evoluție va necesita, de asemenea, creșterea capacității și fiabilității rețelelor vehiculului, precum și a complexității software-ului.
Odată cu noile arhitecturi E/E introduse, o parte din procesarea radar ar putea fi transferată de la modulul senzorului radar (procesare locală − edge computing) la zona sau la unitatea centrală de calcul (ECU), ceea ce ar permite efectuarea unor calcule mai eficiente. În prezent, întreaga procesare radar este realizată local, cu ajutorul “senzorilor inteligenți”, așa cum se arată în figura 4. Aceasta presupune că un număr de module radar independente sunt distribuite în jurul vehiculului, fiecare dintre ele având propriul emițător-receptor și propriile capabilități de procesare. Datele procesate (în mod normal, lista de evenimente) sunt apoi transferate către un ECU ADAS pentru procesare ulterioară și, eventual, pentru fuziune cu datele provenite de la alți senzori. Cu o distribuție adecvată a senzorilor în mașină, mediul înconjurător al vehiculului poate fi perceput în mod corespunzător, iar obstacolele pot fi identificate.
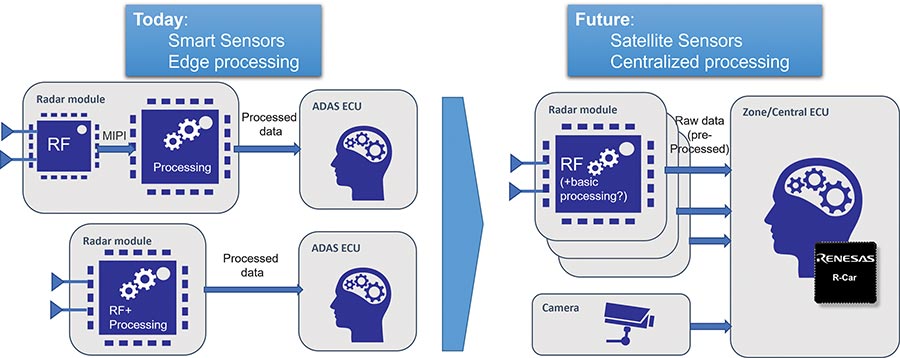
Figura 4: Senzori inteligenți cu procesare locală. (© Renesas)
Odată cu dezvoltarea arhitecturilor de calcul centralizat, procesarea datelor de la unele module radar va fi probabil transferată de la senzorul radar la o unitate de procesare la distanță, fie la un ECU de zonă, fie direct la calculatorul central al vehiculului. Modulele radar în sine ar fi atunci mai puțin “inteligente” și ar efectua doar o cantitate limitată de procesare a semnalelor radar recepționate. De exemplu, modulul va determina distanța până la diferitele obiecte și va furniza profilurile de distanță către procesorul aflat la distanță. Acesta va primi apoi datele preprocesate de la diferite module radar prin satelit și va efectua etapele de procesare rămase pentru fiecare set de date, pentru a genera lista de evenimente cu caracteristicile lor respective (distanță, direcție și viteză), pentru a crea imaginea completă a împrejurimilor. Rezultatele obținute vor fi ulterior fuzionate împreună sau combinate cu rezultatele obținute de la alți senzori. Această nouă configurație multisenzorială va oferi acuratețea necesară și va elimina redundanțele pentru a permite un nivel ridicat de conducere autonomă, după cum se arată în figura 5.
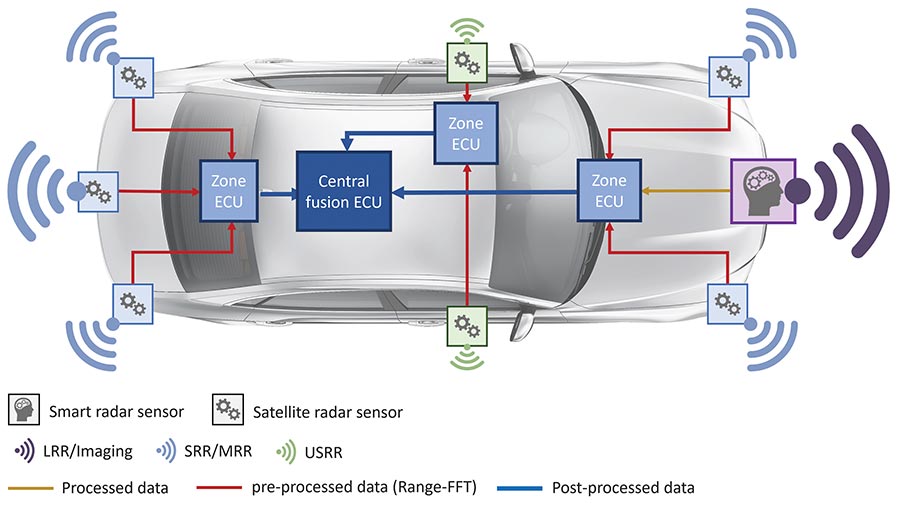
Figura 5: Exemplu de arhitectură radar cu module de satelit și procesare de la distanță pe unități ECU zonale. (© Renesas)
În primele implementări ale acestei arhitecturi centralizate, datele preprocesate de la diferiți senzori radar pot fi transferate către ECU-uri zonale sau centrale utilizând rețeaua Ethernet a automobilului. În cazul în care este necesară o definiție mai înaltă și cantitatea de informații este prea mare, ca în cazul radarelor cu vizibilitate frontală sau al radarelor imagistice, procesarea informațiilor poate fi în continuare efectuată la nivelul senzorului, pentru a reduce cantitatea de date care trebuie transferată.
Prelucrarea centralizată a datelor de la senzorii radar de la distanță oferă o gamă largă de avantaje. În primul rând, modulele radar în sine devin mai puțin complexe, ceea ce permite reducerea dimensiunilor și a costurilor, precum și a problemelor de disipare a căldurii. Reparațiile și actualizările, atât pentru hardware, cât și pentru software, devin mai ușoare.
În al doilea rând, utilizarea rețelei existente a mașinii și anume a rețelei de bază Ethernet, reduce, de asemenea, costurile și greutatea cablurilor. În plus, datele transferate prin Ethernet vor fi disponibile într-un format care le face mai ușor de stocat și de utilizat.
În sfârșit, procesarea datelor pe unitățile de control ale vehiculului deschide ușa pentru o eficiență mai mare și pentru operațiuni mai sofisticate și mai complexe. Capabilitățile de detecție pot fi îmbunătățite prin implementarea fuziunii de date cu informațiile obținute din alte tehnologii de detecție, cum ar fi cele de la camere sau LiDAR. Învățarea automată și inteligența artificială pot fi luate în considerare pentru detecția și predicția avansată, permițând astfel atingerea unor niveluri mai ridicate de conducere autonomă.
Se preconizează că atât procesarea edge, cât și calculul centralizat vor coexista timp de câțiva ani. Migrarea către arhitecturi E/E cu calcul centralizat va necesita acces la legături de mare viteză în tot vehiculul, ceea ce poate duce la utilizarea unor standarde diferite pentru schimbul de date. În orice caz, devin necesare măsuri de securitate suplimentare pentru a garanta integritatea și securitatea datelor transferate. Numărul sporit de module radar de pe automobilul propriu-zis și de pe alte vehicule, toate acestea transmițând și primind unde radio, poate duce, de asemenea, la probleme de interferență care vor trebui rezolvate.
Renesas depune eforturi pentru a oferi soluții de ultimă generație pentru vehiculele viitorului. Compania tocmai a prezentat primul său transceiver radar cu unde milimetrice pentru automobile, RAA270205, cu scopul de a-și extinde soluțiile de detecție pentru ADAS. Renesas își propune să furnizeze componente inovatoare pentru modulele radar cu transmițătoare radar pentru aplicații de imagistică și de procesare centralizată, cuplate cu ECU-uri bazate pe seria R-Car Gen4.
Autor
Marta Martínez-Vázquez Senior Staff Product Marketing Engineer − Automotive Analog Product Marketing Division − Renesas Electronics Europe GmbH
Renesas Electronics Europe | https://www.renesas.com
![]()