

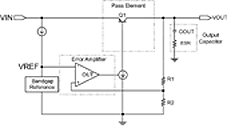
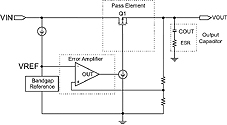
Stabilizatorul cu tranzistor de trecere PNP (Figura 6.a), pe de altă parte, solicită o alegere mai atentă a condensatorului de ieşire. Elementul său de trecere, tranzistorul PNP, este în configuraţie emitor comun, lucru care generează impedanţă mare de ieşire. Importanţa acestui lucru este dată de:
1 PPWR apare la o frecvenţă mai mică decât în cazul stabilizatorului cu tranzistor de trecere NPN.
2 Impedanţa de sarcină, creată de rezistenţa sarcinii şi de capacitatea de ieşire, contribuie semnificativ la stabilitatea buclei, prin adăugarea în diagrama Bode a unui pol de sarcină de joasă frecvenţă (PL). Frecvenţa PL este exprimată ca:
f(PL) = 1/(2p RLOADCOUT) (7)
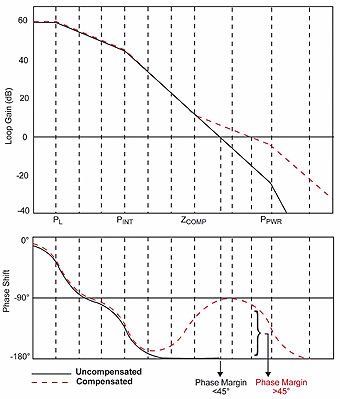
Tipic, RLOAD şi COUT sunt mai mari decât rezistenţa (RINT) şi capacitate (CINT) interne ale stabilizatorului, ceea ce face ca PL să apară la o frecvenţă mai mică decât f(PINT). Este imediat evident că stabilizatorul cu tranzistor de trecere PNP nu este stabil, chiar şi cu compensarea polului dominant (Figura 6.b). Această instabilitate trebuie compensată prin adăugarea unui zero. şi în acest caz, aceasta se realizează prin adăugarea unui condensator pe ieşirea VOUT.
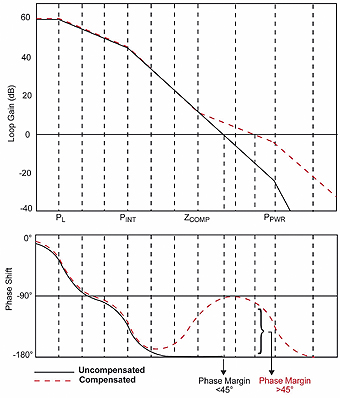
Locul de plasare al zeroului în spaţiul frecvenţelor este critic. Această poziţionare trebuie să fie însoţită de o potrivire atentă cu capacitatea şi ESR ale condensatorului de ieşire.
Zeroul trebuie să apară undeva între PINT şi PPWR (Figura 6.b). Deoarece PPWR apare la o frecvenţă relativ joasă, “spaţiul” dintre PINT şi PPWR este îngust; de unde şi plaja de alegere a f(ZCOMP) este îngustă:
f(PINT) < f(ZCOMP) < f(PPWR)/10 (8)
Ecuaţia 8 ilustrează regula empirică prin care ZCOMP trebuie să apară peste f(PINT), şi mai jos de cel puţin o decadă din f(PPWR). Aceasta se întâmplă deoarece ZCOMP necesită o decadă completă peste f(ZCOMP) pentru a realiza un defazaj complet de +90°. După cum arată ecuaţiile 5.a, 5.b, 6, şi 8, pentru stabilitatea buclei la orice capacitate dată, ESR trebuie să satisfacă relaţia:
RINTCINT/COUT > ESR > 10RPWRCPWR/COUT (9)
Dacă ESR este prea mare sau prea mic, el este în afara domeniului.
ESR este prea mare atunci când există relaţia:
ESR > RINTCINT/COUT (10)
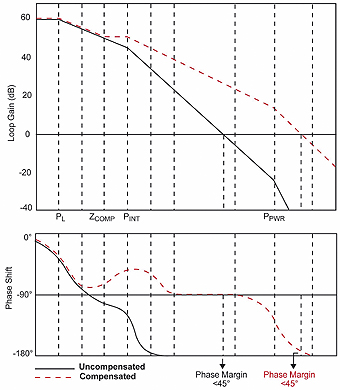
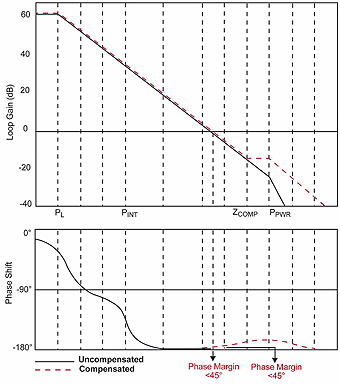
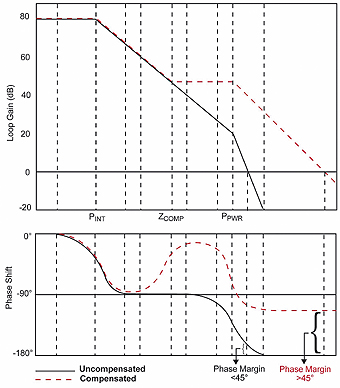
Figura 6.d Diagrama Bode (Compensat w/valoare mică a ESR). Sub această condiţie, ZCOMP apare la o frecvenţă mai joasă decât f(PINT) (Figura 6.c). Din cauza spaţiunlui îngust între PL şi PINT, ZCOMP poate fi într-o decadă a lui f(PINT). Aceasta face ca ZCOMP să nu realizeze un defazaj complet de +90°. Drept rezultat limita de fază nu poate creşte peste 45°; drept urmare, bucla rămâne instabilă. Pe de altă parte, ESR este prea mic atunci când:
ESR < 10RPWRCPWR/COUT (11)
În acest caz, ZCOMP apare într-o decadă mai jos decât f(PPWR), ceea ce împiedică realizarea defazării complete cu +90° (Figura 6.d). Drept urmare, limita de fază nu va creşte peste 45°, iar bucla va rămâne şi de această dată instabilă.
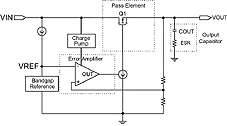
Stabilizatorul cu canal-P FET (Figura 7.a) are elementul său de trecere (canalul-P FET) într-o configuraţie de sursă comună, similar cu configuraţia cu emitor comun a tranzistorului PNP cu impedanţă de ieşire relativ mare. Prin urmare, stabilizatorul cu canal-P FET are o stabilitate a buclei similară cu stabilizatorul cu tranzistor de trecere PNP. Stabilizatorul cu canal-P FET necesită o alegere atentă a condensatorului de ieşire pentru a păstra bucla stabilă (Figura 7.b).
În final, stabilizatorul cu canal-N FET (Figura 8.a) are elementul său de trecere (canalul-N FET) într-o configuraţie cu drenă comună similară cu cea cu tranzistor NPN în configuraţie cu colector comun. În realitate, impedanţa de ieşire a stabilizatorului nu este aşa de joasă ca stabilizatorul standard NPN. Este mai degrabă comparabil cu stabilizatorul cu tranzistor de trecere NPN, faţă de care are un comportament similar al stabilităţii buclei, astfel necesitând un condensator de ieşire pentru compensarea stabilităţii. Oricum, în acest caz valoarea ESR pentru condensatorul de pe ieşire nu este critică (Figura 8.b).
În concluzie, diagrama Bode este o unealtă eficientă pentru analiza stabilităţii buclei stabilizatoarelor liniare. Limita de fază este cel mai important indicator de stabilitate. Dacă prin arhitectura internă a stabilizatorului liniar nu se poate obţine o limită de fază mai mare de 45 de grade, atunci trebuie utilizată o metodă internă sau externă de compensare, precum un condensator pe ieşire, cu scopul de a asigura stabilitatea buclei închise.
Tabelul de mai sus realizează un sumar al caracteristicilor de stabilitate şi metodelor de compensare pentru fiecare dintre stabilizatoarele liniare.

de Qi Deng, Senior Product Marketing Engineer
Microchip Technology
Bibliografie:
1. “Linear Regulators: Theory of Operation and Compensation,” Simpson, Chester, Mai 2000, National Semiconductor Application Note 1148
2. “Art of Electronics,” Horowitz, Paul and Hill, Winfield, Cambridge University Press, a doua ediţie (Iulie 1989), Capitolul 2 (2.04), Capitolul 3 (3.08), Capitolul 4 (4.33, 4.34, 4.35)