

 În viitor, conducerea autonomă va crește considerabil confortul în materie de mobilitate. Până atunci, există deja o serie de mecanisme de acționare electrică de mici dimensiuni care permit un control mai ușor și mai convenabil al vehiculului. Cum sunt ele construite, ce fel de cerințe trebuie să îndeplinească și care sunt tipurile de aplicații propuse de producători pentru a face conducerea și mai plăcută pentru clienții lor?
În viitor, conducerea autonomă va crește considerabil confortul în materie de mobilitate. Până atunci, există deja o serie de mecanisme de acționare electrică de mici dimensiuni care permit un control mai ușor și mai convenabil al vehiculului. Cum sunt ele construite, ce fel de cerințe trebuie să îndeplinească și care sunt tipurile de aplicații propuse de producători pentru a face conducerea și mai plăcută pentru clienții lor?
În prezent, într-un vehicul de dimensiuni medii, există peste 75 de mecanisme de acționare de mici dimensiuni, iar acest număr este în creștere. Motoarele electrice cu o putere de până la 100 W se ocupă de funcții precum reglarea oglinzilor laterale sau închiderea ușii portbagajului. Sunt posibile și alte mecanisme de reglare automată, în funcție de condițiile de utilizare, incluzând nu numai scaunele, ci și oglinzile interioare și tetierele, de exemplu, sau chiar ușile compartimentelor, ce pot fi comandate prin gesturi, de exemplu pentru a deschide și închide torpedoul.
Deoarece micile motoare se bazează pe tensiunea de 12V de la bordul autovehiculului, acestea pot fi alimentate direct prin intermediul bornei 30 (baterie) sau al bornei 15 (post-aprindere). Aceste motoare reprezintă, parțial, motivul pentru care sistemul electric de 12V nu va dispărea de pe vehiculele viitorului – trecerea la tehnologia de 48V, tot mai populară la acest nivel de putere, nu ar oferi deocamdată beneficii semnificative în ceea ce privește reducerea costurilor de producție și dezvoltare. Totuși, dacă ne uităm la secțiunile transversale mai mici ale cablurilor și la curenții de sarcină nominali ai unui sistem electric de 48V, a căror valoare se situează la doar un sfert față de cea a sistemului de 12V, acestea sunt argumente care trebuie luate în considerare pe termen lung.
În cazul acționărilor cu puteri de până la 100W, se utilizează motoare de curent continuu cu perii (BDC) și motoare de curent continuu fără perii (BLDC), precum și motoare pas cu pas. Acestea din urmă sunt ideale pentru aplicațiile în care este necesar un control de precizie absolută sau în care trebuie efectuate reglaje în trepte foarte fine, de exemplu pentru reglarea oglinzilor sau pentru deplasarea (rotirea) acelor instrumentelor din tabloul de bord. Motoarele BDC sunt utilizate ori de câte ori durata de viață lungă și eficiența mai mare pot face loc unor avantaje în materie de costuri. Motoarele BLDC sunt cele mai robuste versiuni, dar sunt mai scumpe și, uneori, mai dificil de controlat.
Construcția și funcția controlerului
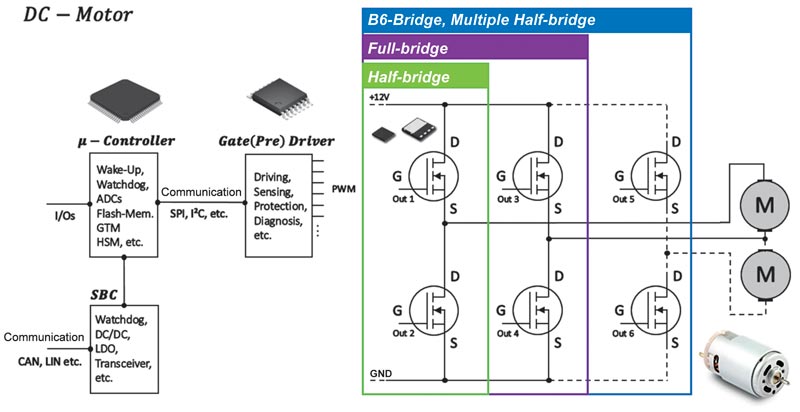
Figura 1
Figura 1 prezintă o construcție simplificată a circuitului unui mic dispozitiv de acționare cu motoare de curent continuu, care include următoarele componente principale: microcontrolerul, cipul de bază al sistemului (SBC – system basis chip), driverul MOSFET-ului ( driverul de poartă) și mai multe MOSFET-uri. SBC-ul este utilizat pentru a crea o interfață de comunicație cu magistrala vehiculului, pentru a garanta că principalele componente sunt alimentate corespunzător și pentru a putea îndeplini sarcini în interesul siguranței funcționale și al fiabilității (de exemplu, o funcție de supraveghere). Fiecare MOSFET este dispus într-o configurație Half-Bridge (jumătate de punte), formând o punte completă (cunoscută și sub numele de punte H) împreună cu motorul conectat între ele. Adăugarea unei a treia jumătăți de punte creează o configurație B6 care permite controlul a două motoare de curent continuu (așa cum se arată în figura 1) sau a unui motor BLDC trifazat.
Microcontrolerul primește semnalele de la controler prin intermediul pinilor săi I/O și le procesează pentru a controla driverul de poartă. Simultan, acesta poate evalua semnalele driverului atunci când apare o eroare. MOSFET-urile sunt declanșate de către driver folosind un semnal PWM. Acest aranjament full-bridge/B6 poate roti motorul în sensul acelor de ceasornic sau în sens invers.
Controlul motoarelor BDC…
Motoarele BDC se compun în principiu din rotor, comutator cu perii de carbon și stator (sau magnet permanent). Periile de carbon conduc curentul către rotor. Frecarea pe care o generează determină uzura periilor. Mișcarea de rotație este generată de câmpul magnetic al rotorului care se formează ca urmare a trecerii curentului prin rotor. Câmpul magnetic al rotorului este aliniat cu cel al statorului. Odată atins polul opus al câmpului magnetic al statorului, comutatorul instalat în rotor schimbă câmpul magnetic al acestuia și generează un câmp magnetic inversat cu 180°. Acest lucru face ca cei doi poli identici să se respingă reciproc, polul rotorului fiind atras de polul opus al statorului. Comutarea este, prin urmare, un proces pur mecanic. Nu este necesar să se determine poziția rotorului în timpul pornirii.
… motoarelor BLDC…
Motoarele BLDC sunt construite ca motoarele sincrone de curent alternativ și au un mecanism de comutare pur electronic, cu magneți permanenți în rotor și o înfășurare controlabilă în stator. Înfășurările sunt de obicei dispuse la unghiuri de 120° una față de cealaltă (sau fracțiuni divizibile ale acestora) și sunt stimulate în ordine succesivă, în funcție de sensul de rotație. Rotorul urmează acest câmp magnetic rotativ.
Pentru a preveni o sarcină excesivă cauzată de curenți de pornire mari, poziția rotorului trebuie determinată înainte de pornire, pentru a se asigura că în timpul pornirii este activată înfășurarea corectă.
În cazul în care detectarea poziției se bazează pe senzori, cu ajutorul a trei senzori cu efect Hall se poate detecta cu precizie câmpul magnetic al magnetului permanent al rotorului. Această metodă are ca rezultat costuri mai mari pentru componente și necesită mai mult spațiu și cablare, dar este simplu de creat. Senzorii cu efect Hall corespunzători calificați pentru automobile (AEC-Q100) de la Diodes, Melexis și TDK-Micronas sunt disponibili la Rutronik.
FOC (Field Oriented Control) este o metodă de detectare a poziției, fără senzori, foarte populară, chiar dacă implementarea algoritmului software și managementul modificării dimensiunii motorului sunt complexe. Pentru a oferi dezvoltatorilor asistență la începutul implementării FOC, STMicroelectronics oferă instrumente software FOC, biblioteca SPC5-MCTK-LIB și kitul de evaluare asociat pentru familia sa de microcontrolere SPC5. Biblioteca funcționează atât cu modelele SPC560P, cât și cu modelele SPC574K și SPC58NN și, prin urmare, acceptă controlere dintr-o varietate de clase de performanță.
Cu driverul de motor trifazat încorporat TLE9879 (e-power IC), inclusiv kitul de evaluare și algoritmii FOC pentru exemple, Infineon a oferit un răspuns pentru controlul BLDC fără senzori prin FOC. Nivelul ridicat de integrare al circuitului integrat înseamnă că, în rest, sunt necesare doar puntea B6 și motorul.
… și motoarelor pas cu pas
Motoarele pas cu pas au doar înfășurări în stator. Acestea sunt construite de obicei ca motoare pas cu pas hibride, în care caracteristica definitorie a construcției rotorului este un magnet permanent combinat cu un miez de fier moale. Declanșarea selectivă a înfășurărilor permite reglarea rotorului sub un anumit unghi. Modificarea unghiului la fiecare pas depinde de numărul de faze ale motorului și de numărul de perechi de poli din rotor; modificarea unghiului este de obicei de 1,8° sau 0,9° cu două faze (adică există două înfășurări în stator și un număr corespunzător de poli în miezul rotorului). Motorul pas cu pas este relativ simplu de controlat; el permite mișcări reproductibile și o precizie foarte mare. Și, în plus, nu necesită nicio reacție de poziționare.
Cerințele dispozitivelor de acționare de mici dimensiuni și putere redusă
În funcție de aplicație, acționările electrice de mică putere și dimensiuni reduse trebuie să îndeplinească o varietate de cerințe. Cele mai importante sunt:
• Eficiență înaltă
• Dimensiuni și greutate reduse
• Emisii reduse de zgomot și funcționare silențioasă
• Rezistență la solicitări (apă, praf, vibrații etc.)
• Diferite moduri de funcționare (continuă, periodică, scurtă)
• Fiabilitate înaltă, în special în cazul acționărilor critice din punct de vedere al siguranței
• Costuri reduse
• Ușurință în implementare
Furnizorii de semiconductoare răspund acestor cerințe cu circuite integrate special îmbunătățite pentru acest scop. De exemplu, TB9083FTG de la Toshiba este proiectat special pentru aplicații de siguranță funcțională ca pre-driver de siguranță. Optimizările în tehnologia de procesare permit fabricarea unor capsule mai mici și utilizarea unor cantități mai mici de material, de exemplu în cazul MOSFET-urilor de la Diodes (PowerDI3333-8) cu o dimensiune a capsulei de aproximativ 3 mm × 3 mm la 40V. Curenții de polarizare reduși în drivere și o rezistență RDSon mai mică în MOSFET-uri cresc eficiența, micșorând astfel pierderile de putere și căldura disipată. Noile tehnologii de încapsulare cu răcire pe partea superioară și o disipare sporită a căldurii contribuie la un management termic mai simplu, ceea ce sporește rezistența circuitului integrat. Pentru a minimiza emisiile de zgomot și problemele EMI, toți furnizorii implementează funcții precum PWN și controlul vitezei de rotație în funcție de drivere.
Tot mai multe funcții legate de sistem sunt integrate în modulele semiconductoare pentru a facilita implementarea în circuit. Acestea includ măsurarea curentului și amplificatoare de curent integrate (CSA), precum și funcții de protecție și diagnosticare, cum ar fi importul de date prin SPI pentru o detecție mai ușoară a stării și estimarea sfârșitului duratei de viață, de exemplu cu L9907 de la STMicroelectronics. Funcții precum ‘auto-restart’ și ‘latch-off’ permit, de asemenea, testarea și repornirea după o eroare. Furnizorii oferă și instrumente de simulare, cum ar fi “Toolbox” de la Infineon, pentru a-i sprijini pe dezvoltatori la implementare.
Niveluri diverse de integrare pentru cerințe diferite
În funcție de cerințe, se pot alege cipuri cu diferite niveluri de integrare (a se vedea tabelul).
Într-un proiect cu componente discrete, toate acestea sunt poziționate pe PCB. Este adesea cea mai ieftină opțiune, dar necesită mult spațiu și are ca rezultat temperaturi mai ridicate. Pentru a asigura cerințele de spațiu cât mai reduse, Diodes oferă o gamă largă de MOSFET-uri duale (de tip N) și MOSFET-uri complementare (de tip N+P) într-o singură capsulă. În ceea ce privește driverele, sunt disponibile produse remarcabile, precum L9907 de la STMicroelectronics și TLE9180 de la Infineon; acestea pot fi utilizate cu o varietate de tensiuni ale sistemului electric și, prin urmare, sunt potrivite și pentru mici aplicații de control din segmentul camioanelor.
Pentru aplicații de integrare medie, unele componente au fost combinate în module. Acestea pot consta din MOSFET-uri și driverele asociate, cum ar fi BD63035EFV-M de la Rohm sau CJ260 de la Bosch AE. Infineon, pe de altă parte, combină SBC-urile (cipuri de bază ale sistemului) cu driverele în modulele sale TLE956x. Integrarea medie oferă un bun compromis între restricțiile de spațiu și costuri. Aceasta implică cel mai mic efort de dezvoltare și reprezintă, în prezent, cea mai bună modalitate de implementare a protecției circuitelor. Dar dacă spațiul alocat este foarte limitat, iar răcirea PCB-ului nu poate fi realizată cu ușurință, se recomandă efectuarea unui alt pas spre integrare.
Integrarea înaltă combină microcontrolerul cu driverul MOSFET și funcțiile unui SBC într-o singură capsulă. În general, o asemenea soluție duce la inflexibilitate, deoarece singura ajustare care mai poate fi făcută este declanșarea MOSFET-urilor. Această soluție puternic integrată vine de la Infineon și este cunoscută sub numele de “E-Power IC” (TLE98xy). Infineon compensează lipsa de flexibilitate cu o varietate de modele de circuite integrate pentru aplicații cu cerințe de jumătate de punte, punte completă sau punte B6.
Controlerul integrat HVC4223 de la TDK-Micronas este reprezentativ pentru cel mai înalt nivel de integrare. Acesta combină toate cele patru componente – microcontroler, SBC, driver de poartă și MOSFET-uri – într-un singur circuit integrat, dar acest lucru înseamnă că trebuie să se potrivească exact cerințelor aplicației.
Avantajul modulelor cu grad de integrare mediu și ridicat este dat de funcțiile de diagnosticare integrate. De obicei, acestea includ:
– OC/UC – protecție la supra/subcurent
– OT – protecție la supratemperatură
– OL – protecție la sarcină deschisă
– SC/SCG – protecție la scurtcircuit / protecție la scurtcircuit la masă
– LD – protecție împotriva descărcării sarcinii
– Protecție cross-conduction
– Protecție la polaritate inversă (de obicei prin intermediul unui MOSFET extern)
În prezent sunt oferite și drivere MOSFET discrete cu funcții de protecție și diagnosticare, de exemplu cu protecție la supracurent și supratemperatură, deși aici sunt adesea necesare componente discrete suplimentare, cum ar fi termistori PTC (termistori cu coeficient de temperatură pozitiv).
Funcțiile de protecție și de diagnosticare devin în prezent un aspect esențial pentru dezvoltatorii de dispozitive electronice și producătorii de echipamente originale, deoarece permit monitorizarea ușoară a circuitului. Ca atare, ele reprezintă, totodată, un pas către vehiculele complet autonome.
Construcția simplificată a unui mic sistem de acționare cu motor de curent continuu (Sursa: Rutronik)
| Cerințe/factor de formă |
Soluție discretă |
Integrare medie |
Integrare înaltă |
| Cerințe de spațiu |
Mari |
Medii |
Mici |
| Opțiuni de protecție |
Medii |
Mari |
Medii |
| Flexibilitate |
Ridicată |
Medie |
Mică |
| Consum de putere |
Mare |
Mic |
Mediu |
| Costuri totale |
Mici |
Medii |
Mari |
Circuitele integrate îndeplinesc cerințe diferite în funcție de nivelul de integrare.

Autor: Bernd Wondratschek, Suport Tehnic Rezistoare
Rutronik | https://www.rutronik.com
![]()