

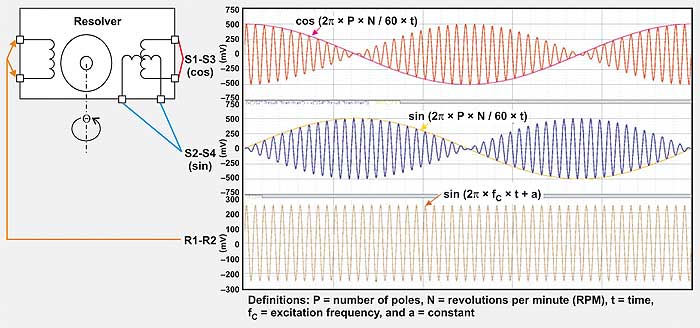
Figura 1: Reprezentarea semnalelor de la resolver: excitaţie, sinus şi cosinus.
Principiul conversiei resolver/digital
După cum se poate observa în figura 1, un senzor resolver are o înfăşurare pe rotor (R1-R2) cu undă sinusoidală de excitaţie, care este cuplată AC la două înfăşurări pe stator. Înfăşurările pe stator, o bobină sinusoidală (S2-S4) şi o bobină cosinusoidală (S1-S3), sunt mecanic poziţionate cu un defazaj de 90 de grade. După cum rotorul se învârte, unghiul poziţiei rotorului (Θ) se schimbă faţă de înfăşurările de pe stator. Înfăşurările de pe stator şi rotor au un raport de transformare cu un ordin de 30%. Semnalele modulate în amplitudine rezultate prezentate în figura 1 sunt semnale de ieşire tipice pentru un resolver. Aceste semnale trebuie să fie amplificate, demodulate şi post-procesate pentru a extrage informaţiile de unghi şi viteză.
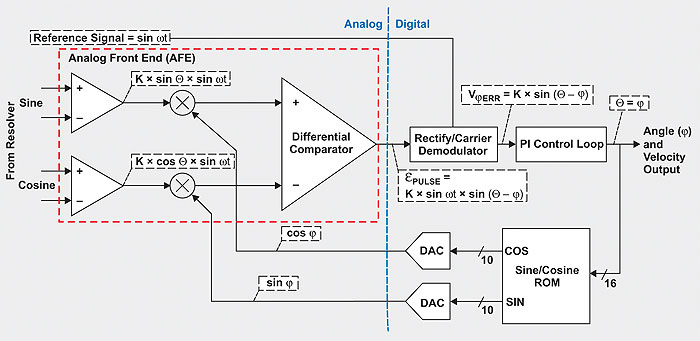
Figura 2: Arhitectură simplificată de convertor resolver/digital (RDC).
Arhitectura RDC
Figura 2 prezintă o arhitectură RDC care converteşte semnalele analogice de la resolver în ieşiri digitale de unghi şi viteză. Partea de condiționare a semnalului (AFE) constă dintr-un amplificator cu câştig programabil şi un comparator. Blocul AFE condiţionează semnalele de ieşire ale resolverului prin înlăturarea zgomotului, stabileşte polarizarea de intrare corectă DC şi potriveşte amplificarea semnalului AC pentru a fi utilizat de blocurile subsecvente. O buclă de reacţie digitală este partea principală a conversiei RDC. Ea porneşte de la asumarea unui unghi digital Φ.
Acest unghi este procesat digital utilizând tabele de căutare sinus şi cosinus stocate în memorie. Acesta, în schimb, este trimis către convertoarele corespunzătoare digital/analogice sinus şi cosinus. Ieşirile acestor convertoare sunt apoi multiplicate cu semnalele resolverului modulate în amplitudine (Ecuaţiile 1 şi 2) care sunt intrările sinus şi cosinus ale RDC.
Semnal sinus al senzorului resolver: sin Θ × sin ωt (1)
Semnal cosinus al senzorului resolver: cos Θ × sin ωt (2)
unde Θ este unghiul la arborele resolverului, iar ω este frecvenţa de excitaţie aplicată la R1-R2.
Obiectivul principal al arhitecturii RDC este de a calcula unghiul de rotaţie (Θ) şi viteza arborelui resolverului. După cum se poate observa în figura 1, informaţia de poziţie unghiulară este extrasă din anvelopă sau din vârfurile de tensiune ale semnalelor de intrare sinus şi cosinus. Cu scopul de a calcula unghiul, sin Θ este multiplicat de un semnal de reacţie (cosinus Φ), unde Φ este unghiul asumat rezultat din tabelele de căutare din memorie. Similar, cosinusul de Θ este multiplicat de semnalul de reacţie (sinus de Φ). Scopul acestei multiplicări este rezolvarea formulei generale:
(sin A × cos B) – (sin B × cos A), adică sin (A – B).
εpulse = sin (A – B)= (K × sin Θ × sin ωt × cos Φ) – (K × cos Θ × sin ωt × sin Φ) (3)
εpulse = K × sin ωt × (sin Θ × cos Φ – cos Θ × sin Φ) = K × sin ωt × sin (Θ – Φ)
unde Φ = aproximarea unghiului resolverului şi K = constantă
Ieşirea comparatorului diferenţial este în formă digitală şi este direct trimisă către blocurile digitale pentru a elimina unda purtătoare sau componenta sin ωt cu un circuit de detecţie sincron. Acest bloc de detecţie sincronă utilizează semnalul de reacţie al excitatorului ca referinţă. Ieşirea rezultată, VΦERR, este trimisă în bucla de control de urmărire digitală pentru a genera ieşirea de unghi dorită.
VΦERR = K × sin (Θ – Φ) (4)
Reacţia negativă a configuraţiei buclei de control implicată în această arhitectură RDC ajută la reducerea continuă a semnalului VΦERR pentru a fi foarte aproape de zero. Pentru valori mici ale Θ – Φ, VΦERR este foarte aproape de zero. Astfel, bucla de reacţie digitală se corectează continuu, făcând ca eroarea să se apropie de zero, astfel încât unghiul de ieşire asumat RDC (Φ) este egal cu unghiul la arborele resolverului (Θ).
După cum se poate vedea în figura 2, semnalul VΦERR este trimis către o buclă de control PI (Tip II buclă servo directă). Sunt posibile numeroase arhitecturi de control pentru implementarea buclei de urmărire.
Una dintre configuraţiile de control de reacţie uzuale este cunoscută ca acţiune integrală.[3, 4]
Avantajul acestei configuraţii software îl reprezintă abilitatea sa de a reduce eroarea de urmărire a stării de echilibru la aproape zero. Cu toate acestea, trebuie avute precauţii, deoarece un câştig integral excesiv poate cauza oscilaţii în sistem, sau chiar instabilitate. Această problemă se rezolvă prin adăugarea unui control proporţional larg utilizat, cunoscut sub numele de control proporţional integral (PI).
Controlul PI este implementat tipic după cum se poate vedea în figura 3.[5] Acesta ajută la aducerea erorii de urmărire la zero şi are un răspuns tranzitoriu îmbunătăţit. Datorită avantajului adus de controlul proporţional, acesta nu cauzează abateri şi conduce la un răspuns mai rapid faţă de controlul doar integral.
Exemplu de aplicaţie: Vehicul electric (EV)
Acţiunea de control al motorului este o parte integrală a unui EV. Comunicarea informaţiei de poziţie a motorului precis şi sigur este esenţială. Resolverul ataşat de un arbore de motor tinde să îşi schimbe ieşirea foarte rapid. De aici, arhitectura RDC trebuie să fie proiectată pentru a urma această schimbare. Tipic, componenta cea mai critică a arhitecturii RDC, care determină cât de rapid se întâmplă acest lucru este bucla de urmărire digitală.
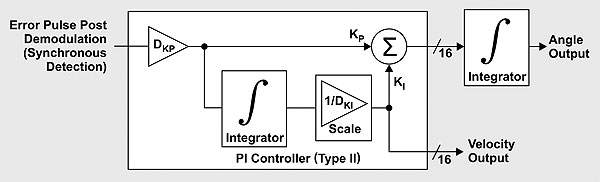
Figura 3: Exemplu de buclă de control PI.
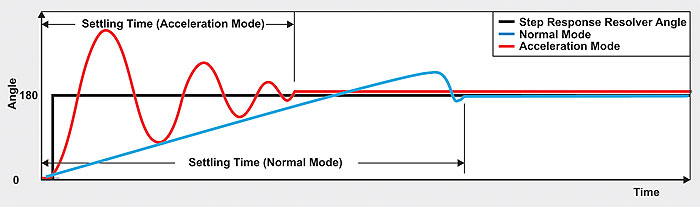
Figura 4: Timp de stabilizare a RDC la semnal treaptă.
Pentru a determina comportarea buclei de urmărire, este important de înţeles un termen cheie: timpul de stabilizare. Atunci când semnalul de ieşire al resolverului se schimbă rapid, răspunsul la semnal treaptă al convertorului este determinat de limita fazei şi limita de amplificare a buclei de control.[3] Timpul de stabilizare este un indicator de performanţă rapid al sistemului de control al RDC. Figura 4 arată un exemplu de timp de stabilizare pentru un sistem de control de reacţie RDC la o schimbare de tip treaptă a intrării, prezentate cu negru.
Semnalul albastru arată răspunsul de mod normal pentru circuitul din figura 3, iar semnalul roşu arată răspunsul în mod de acceleraţie (schimbare rapidă a unghiului), care este descris în mai jos.
Cu scopul de a urmări unghiul de rotaţie în condiţii de schimbare rapidă, în figura 5 este prezentată adăugarea unui alt bloc de buclă de acceleraţie, care poate schimba amplificarea reacţiei buclei de control. Opţiunea de amplificare mai mare ajută ca bucla de control să urmărească mai uşor un unghi de rotaţie mai rapid. În modul de acceleraţie (roşu în figura 4), amplificarea proporţională este crescută de câteva ori faţă de modul normal. Sunt adăugate de asemenea câteva funcţii de diagnosticare pentru a alerta sistemul dacă este compromisă integritatea semnalului de pe bobina excitatorului, cât şi a bobinelor sinus şi cosinus.
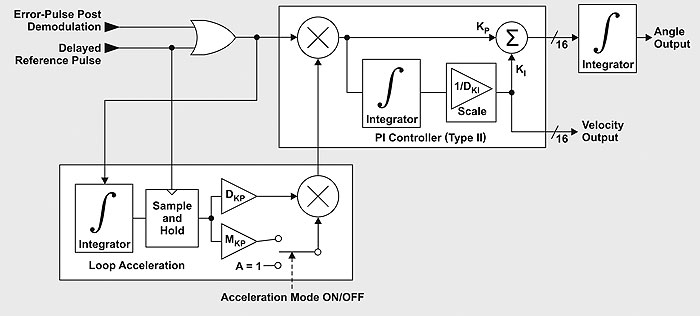
Figura 5: Control PI cu bloc de accelerare.
Surse de erori care afectează precizia sistemului
Erorile pot fi categorisite în trei grupuri:
Grup 1: Plasarea senzorului resolver
• Construcţia mecanică a senzorului: variaţiile în fabricaţie generează erori statice.
• Dezechilibrul bobinei: tensiunile de ieşire ale bobinelor de sinus şi cosinus pot fi dezechilibrate, conducând la erori.
• Nealinierea senzorului resolver: dacă resolverul este montat incorect, poate conduce la erori statice în sistem.
Grup 2: Arhitectura RDC
Arhitectura RDC poate cauza erori statice şi dinamice în sistem. Întârzierea dintre intrarea semnalului resolverului şi ieşirea datelor de unghi poate de asemenea cauza erori în sistem. De exemplu, filtrul de intrare este utilizat pentru a decupla zgomotul de la sistem. Întârzierea cauzată de filtrul de intrare sau constanta de timp de filtrare poate conduce la deplasări unghiulare la operare de mare viteză. De aceea, trebuie acordată atenţie la selectarea condensatoarelor de mod comun adăugate pentru filtrarea zgomotului. Aceste condensatoare pot afecta semnificativ relaţia de fază dintre semnalele resolverului şi pot cauza un dezechilibru între ieşirile sinus si cosinus, conducând la erori ale unghiului de ieşire RDC.
Suplimentar, derivele de compensare în AFE şi liniaritate a convertoarelor D/A pot afecta semnificativ precizia unghiului convertit.
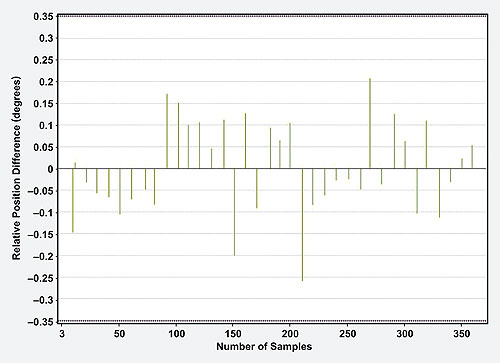
Figura 6: Performanţele măsurate ale RDC comparativ cu un traductor optic pe 19-biţi.
Grup 3: Factori de mediu
Câmpul magnetic extern de la circuitul de control al motorului şi suportul de înaltă tensiune din EV pot afecta acţiunea de cuplare magnetică a senzorului resolverului şi pot cauza erori. Ecranarea cablurilor este uzual utilizată pentru a preveni afectarea semnalelor de la resolver, alături de un filtru pe intrarea convertorului resolverului pentru a tăia orice semnal nedorit. Abilitatea arhitecturii RDC de a elimina zgomotul de mod comun este critică. Altfel, zgomotul apare sub forma raportului semnal – zgomot total al RDC, afectând performanţele de raport semnal-zgomot (SNR) şi distorsiune armonică totală (THD).
Performanţe RDC faţă de un traductor optic pe 19-biţi
Pentru a înţelege mai bine performanţele sistemului resolver, rezultatul unui RDC pe 12 biţi a fost comparat cu un traductor optic pe 19 biţi. Aranjamentul mecanic constă dintr-un resolver şi un traductor optic montate pe acelaşi arbore. Diferenţa de poziţie relativă a fost măsurată şi prezentată grafic (Figura 6). Diferenţa relativă exclude eventuala nealiniere a valorilor absolute. Erorile dintre deviaţia unghiulară absolută a RDC pe 12 biţi şi traductorul optic pe 19 biţi este mai mică de ±0,25 de grade.
Bibliografie:
1. Ankur Verma and Amanda Weise, “Rotary position sensing for electric vehicles,” Part I, EDN, October 02, 2015
2. PGA411-Q1 data sheet, Texas Instruments, 2015
3. Ron Mancini, “Feedback and Stability Theory,” Texas Instruments literature, (SLOA077)
4. Irfan Ahmed, “Implementation of PID and Deadbeat Controllers with the TMS320™ Family,” Application Report, Texas Instruments (SPRA083)
5. Dave Wilson, “Teaching Your PI Controller to Behave (Part 1),” Motor Drive & Control, E2E™ blog, Texas Instruments, July 20, 2015 6. Martin Staebler, “Designing an EMC-compliant interface to motor position encoders – Part 1,” Motor Drive & Control, E2E blog, Texas Instruments, August 31, 2015
Mulţumiri: Autorii doresc să mulţumească lui Toru Tanaka de la Texas Instruments pentru munca sa iniţială asupra definirii unui sistem RDC.
Autori: Ankur Verma, Inginer de aplicaţii şi Anand Chellamuthu, Inginer de proiectare, Mixed Signal Automotive
Texas Instruments | www.ti.com