


Testarea radarelor auto cu unde milimetrice pentru sistemele ADAS și conducerea autonomă
Radarele auto cu unde milimetrice sunt utilizate pentru detectarea persoanelor și a obiectelor în cadrul sistemelor avansate de asistență a șoferului (ADAS), precum și în aplicațiile de conducere autonomă (AD). În mod obișnuit, senzorii destinați monitorizării mediului exterior al vehiculului includ radare, camere video și sisteme LiDAR (Light Detection and Ranging). Sistemele ADAS asistă șoferul într-o varietate de manevre de conducere, precum avertizarea în caz de coliziune, frânarea automată sau asistența la parcare. În cazul conducerii autonome, datele provenite de la senzori sunt utilizate pentru a controla automat vehiculul.
Radarul auto funcționează, de regulă, în benzile de frecvență de 24 și 76 GHz. Banda de 24 GHz este destinată monitorizării pe distanțe scurte și medii, contribuind la reducerea daunelor în caz de coliziune, dar și la supravegherea frontală și posterioară a vehiculului. Datorită rezoluției sale superioare, radarul din banda de 76–77 GHz este utilizat în principal pentru detectarea obstacolelor aflate la distanțe de până la 100–200 metri în fața vehiculului.

Tabelul 1: Alocări de frecvențe pentru radarul cu unde milimetrice pentru automobile în fiecare regiune.
De asemenea, radarele sunt folosite și în aplicații de detecție din interiorul vehiculului, cunoscute și ca “in-cabin sensing”. De exemplu, sistemele create pentru a preveni uitarea copiilor sau a animalelor în mașină funcționează în benzile de 60–77 GHz. Tabelul 1 prezintă alocările de frecvențe pentru radarele auto cu unde milimetrice în diferite regiuni.
Metode radar de măsurare
Radarele pentru automobile utilizează fie metoda cu impulsuri, fie metoda cu unde continue modulate în frecvență (FMCW – Frequency Modulated Continuous Wave). Metoda cu impulsuri măsoară timpul de propagare al undei radio de la emițător-receptor până la obiect și înapoi, prin analizarea semnalului reflectat.

Figura 1: Scheme de modulare a semnalului pentru radarul auto – (a) metoda cu impulsuri, (b) metoda FMCW. (Sursa imaginii: Anritsu)
Metoda FMCW transmite semnale radio periodice către un obiect, cu o frecvență care crește progresiv într-un interval de timp definit. În acest caz, undele radio transmise și cele reflectate interferează pentru a genera un semnal de bătaie (beat signal). Prin analizarea diferenței de frecvență dintre semnalul emis și cel reflectat, precum și a altor parametri, pot fi determinate atât distanța până la obiect, cât și viteza acestuia. Figura 1 prezintă schemele de modulare a semnalului pentru cele două metode radar utilizate în domeniul auto.
Spre deosebire de metoda cu impulsuri, FMCW oferă avantaje precum puterea de transmisie redusă și un raport semnal-zgomot ridicat. În plus, cerințele relativ scăzute privind frecvența de răspuns a circuitului transmițător permit o proiectare mai simplă, ceea ce contribuie la reducerea costurilor. În consecință, metoda FMCW este utilizată pe scară largă în aplicațiile radar pentru automobile.
Noțiuni de bază privind FMCW
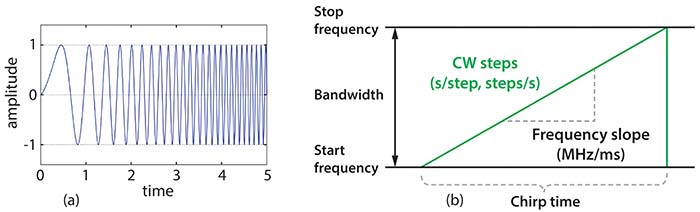
Figura 2: Exemplu de semnal chirp. (Sursa: Anritsu)
Un semnal a cărui frecvență crește liniar în timp este cunoscut sub denumirea de semnal chirp (figura 2a) și reprezintă un element esențial pentru performanța unui radar FMCW.
Din semnalul chirp ilustrat în figura 2b, unde axa verticală indică frecvența în funcție de timp, se pot determina rezoluția în distanță și distanța maximă de detecție – două caracteristici esențiale ale performanței unui radar FMCW. Rezoluția în distanță Dres este exprimată prin:
Dres = c/2B = c/2STc
unde c este viteza luminii, B este lățimea de bandă a semnalului chirp (frecvența finală – frecvența inițială), S este panta chirpului, iar Tc este durata unui chirp.
Conform acestei ecuații, cu cât lățimea de bandă B este mai mare, cu atât rezoluția în distanță este mai bună. De exemplu, pentru o lățime de bandă de 2 GHz, rezoluția este de aproximativ 7,5 cm, iar pentru 4 GHz – aproximativ 3,8 cm.
Pe de altă parte, distanța maximă de detecție este invers proporțională cu panta chirpului S, care exprimă viteza de creștere a frecvenței. Cu cât panta este mai mică, cu atât radarul poate detecta obiecte la distanțe mai mari.
Pentru o durată chirp Tc fixă, o lățime de bandă mai mare duce la o rezoluție îmbunătățită. Însă, aceasta implică un compromis: panta chirpului crește odată cu lățimea de bandă, ceea ce limitează distanța maximă de detecție. Acest compromis trebuie gestionat cu atenție în proiectarea sistemelor radar auto.
În funcție de aplicație, radarul auto cu unde milimetrice acordă prioritate fie rezoluției, fie distanței de detecție. De exemplu, în cazul controlului adaptiv al vitezei de croazieră, este esențială capacitatea de a detecta vehicule la distanță mare, în timp ce rezoluția poate fi modestă. Pe de altă parte, pentru evitarea coliziunilor, este necesară o rezoluție ridicată pentru a reacționa rapid la obstacole aflate în apropiere.
Pe baza semnalului chirp, se pot calcula rezoluția în viteză Vres și viteza maximă de detecție Vmax, folosind relațiile:
Vres = ?/2Tc
Vmax = ?/4Tc
unde ? = c/f este lungimea de undă a radarului.
Așadar, viteza maximă de detecție Vmax este invers proporțională cu durata chirpului Tc. Reducerea duratei chirpului crește viteza maximă de detectare. Reducerea acestei durate permite detectarea unor viteze mai mari, dar în același timp afectează negativ rezoluția în distanță – un alt compromis important în proiectare.
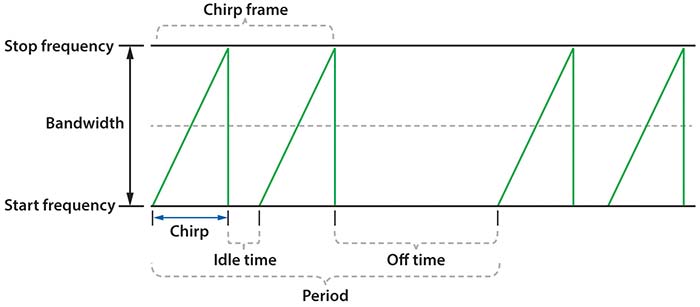
Figura 3: Caracteristicile cadrului FMCW. (Sursa imaginii: Anritsu)
Un cadru radar poate conține de la câteva până la câteva sute de chirpuri. Un exemplu de structură de cadru chirp este prezentat în figura 3.
Durata unui cadru Tf este calculată astfel:
Tf = (Tc + Twait) x N
unde Twait este timpul de așteptare (inactiv) dintre chirpuri, iar N este numărul total de chirpuri din cadru.
Utilizarea mai multor chirpuri într-un singur cadru permite obținerea informațiilor Doppler necesare pentru determinarea precisă a vitezei obiectului. De asemenea, poate exista un timp de pauză variabil între cadre, utilizat pentru optimizarea consumului de energie al chipsetului radar.
Măsurarea semnalului FMCW
Măsurarea semnalelor chirp este îngreunată de mai mulți factori, printre care: schimbările foarte rapide ale frecvenței, modulația de bandă ultra-largă și frecvențele chirp din ce în ce mai ridicate. De cele mai multe ori, toate aceste provocări trebuie abordate simultan.
Semnalele chirp sunt măsurate, de regulă, cu ajutorul unui analizor de spectru, un instrument utilizat în mod obișnuit pentru evaluarea caracteristicilor de transmisie ale echipamentelor de comunicații wireless. Există două tipuri principale: analizorul cu baleiaj și analizorul în timp real.
Analizorul de spectru cu baleiaj
Analizorul de spectru cu baleiaj folosește o arhitectură superheterodină, în care eșantionarea și procesarea semnalului au loc secvențial. Atunci când frecvența chirp se modifică foarte rapid, acest tip de analizor nu mai poate ține pasul din cauza prelucrării secvențiale și riscă să rateze captarea unor chirpuri. Regiunile neacoperite sunt cunoscute sub denumirea de puncte oarbe (blind spots).
Analizorul de spectru în timp real
În schimb, analizorul de spectru în timp real, care utilizează transformata Fourier rapidă (FFT), efectuează eșantionarea și procesarea semnalului în paralel, ceea ce îi permite să detecteze variațiile de frecvență de foarte scurtă durată din semnalul chirp. Cu toate acestea, lățimea de bandă de analiză a acestor instrumente este limitată de specificațiile hardware și, de obicei, variază de la câteva zeci la câteva sute de MHz. Această lățime de bandă nu este suficientă pentru a acoperi întregul spectru al unui chirp FMCW din domeniul radarului auto, care poate ajunge la zeci de GHz.
Pentru a depăși această limitare, se utilizează o tehnică de măsurare secvențială a mai multor intervale de frecvență, urmată de reconstituirea formei complete de undă. Deși această metodă permite captarea întregii lățimi de bandă, timpul necesar pentru comutarea între segmente poate duce, din nou, la apariția unor puncte oarbe.
O soluție completă pentru măsurarea chirpului implică adesea utilizarea combinată a unui osciloscop și a unui analizor de spectru. Osciloscopul are viteza necesară pentru a achiziționa semnalul chirp atât în domeniul timp cât și în domeniul frecvență, precum și pentru a înregistra semnalele sinusoidale. Ulterior, analizorul de spectru este utilizat pentru analiza spectrală a formelor de undă captate de osciloscop, în scopul evaluării caracteristicilor de frecvență ale semnalului.
Evaluarea performanțelor de bază ale FMCW
Analizorul de spectru cu bandă ultra-largă MS2760A, dezvoltat de Anritsu, este un instrument compact și ușor de utilizat, creat pentru măsurarea caracteristicilor fundamentale ale semnalelor radar cu unde milimetrice utilizate în domeniul auto. Printre parametrii care pot fi evaluați se numără: frecvențele de pornire și oprire ale semnalului chirp FMCW, lățimea de bandă, amplitudinea, durata cadrului și numărul de chirpuri per cadru.
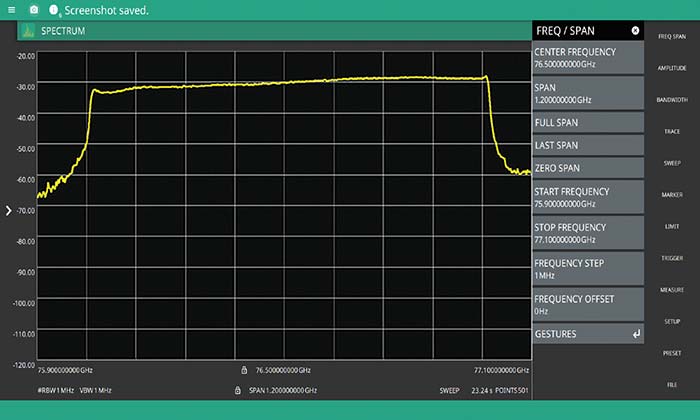
Figura 4: Forme de undă FMCW într-un cadru radar unitar. (Sursa imaginii: Anritsu)
Figura 4 prezintă rezultatele unei măsurători a semnalului chirp FMCW în banda de 1 GHz (între 76 și 77 GHz), realizată cu ajutorul analizorului MS2760A. Instrumentul este capabil să capteze toate chirpurile FMCW într-o singură scanare. După achiziție, datele sunt transferate și procesate pe un calculator.
Un avantaj major al modelului MS2760A constă în capacitatea de acoperire continuă a frecvențelor, de la 9 kHz până la 170 GHz, ceea ce îl face ideal pentru aplicații cu bandă ultra-largă. Dimensiunile compacte ale analizorului îl fac ușor de transportat, instalat și operat în diverse medii: linii de producție, camere de testare sau scenarii de testare pe teren.
Aceste performanțe sunt posibile datorită tehnologiei brevetate NLTL (Non-Linear Transmission Line) de la Anritsu, care elimină necesitatea unui mixer convențional de mari dimensiuni pentru conversia în jos. Receptorul NLTL “ShockLine” poate genera armonici la frecvențe foarte înalte și permite eșantionarea semnalului până la 170 GHz.
Datorită formatului său portabil, MS2760A poate fi integrat în configurații cu mai multe analizoare de spectru, contribuind la creșterea eficienței procesului de testare și dezvoltare și la reducerea riscurilor de întârzieri în proiecte sau a investițiilor de capital costisitoare.
Concluzie
Pe măsură ce tehnologia radarului auto cu unde milimetrice evoluează, metoda dominantă FMCW generează provocări tot mai complexe în procesul de testare, cauzate de variațiile rapide ale frecvenței chirp, lățimea de bandă ultra-largă și frecvențele din ce în ce mai ridicate.
Tehnologia NLTL (Non-Linear Transmission Line) de la Anritsu oferă un răspuns eficient la aceste provocări prin intermediul analizorului de spectru cu bandă ultra-largă MS2760A. Acest instrument compact nu doar că acoperă o gamă extinsă de frecvențe, dar este și ideal pentru testarea de bază a radarelor FMCW, susținând astfel aplicațiile avansate din domeniul ADAS și al conducerii autonome.
 Autor:
Autor:
Tomohide Yamazaki,
Ph.D Assistant Manager,