

Există diferite tipuri de motoare ce pot fi utilizate în sistemele de comandă echipate cu dispozitive electronice şi fiecare dintre ele pot fi comandate diferit. Elementele de comandă hardware şi software ale unui motor folosit în sistemele electrice de putere ale autoturismelor vor fi diferite faţă de elementele de comandă şi control ale unui motor utilizat pentru sistemul de ventilaţie din interiorul unui laptop. Acest articol va discuta despre diferitele tipuri de motoare ce sunt implementate în diverse sisteme şi soluţiile tipice utilizate pentru controlul lor.
Motoarele cu perii de curent continuu
Motoarele cu perii de curent continuu (CC) sunt cel mai uşor de comandat datorită auto-comutării. Alimentaţi periile şi motorul va începe să se rotească. Viteza se modifică foarte simplu prin modificarea tensiunii de alimentare continue aplicată periilor. Pentru mişcările de bază, motoarele cu perii de curent continuu reprezintă cea mai ieftină soluţie. Pe de altă parte însă, periile se vor uza în timp, deci vor trebui înlocuite. În plus, aceste tipuri de motoare produc zgomot electric şi apar de asemenea pierderi prin frecare la interfaţa mecanică a periilor. Acestea din urmă se manifestă prin încălziri ce pot creea uneori probleme în indusul motorului.
Produsele tipice care utilizează motoarele CC cu perii sunt jucăriile, uneltele portabile, antenele electrice, sistemele cu servo-mecanisme, ventilatoarele şi alte dispozitive precum cele utilizate la ridicarea şi coborârea geamurilor portierelor autoturismelor.
Motoare de curent continuu fără perii
Motoarele CC fără perii sunt normal mai uşoare şi mai fiabile decât cele cu perii datorită absenţei mecanismului cu perii. Încălzirea este generată în stator astfel încât problemele sunt mult mai simplu de rezolvat (câtă vreme, prin definiţie, într-un mediu staţionar absorbţia de căldură se realizează mult mai uşor). Viteza se modifică prin varierea tensiunii aplicate obţinându-se performanţe de viteză foarte bune şi datorită eliminării pierderilor de energie cauzate de sistemul de perii. În schimb, dezavantajul motoarelor CC fără perii este dat de cerinţa pentru comutare a rotorului ce are nevoie de un modul de comandă. Acest lucru înseamnă existenţa unui modul electronic de comandă al motorului, practic costul sistemului va creşte.
Produsele tipice care folosesc motoare de curent continuu fără perii sunt ventilatoarele PC-urilor şi disk driver-elor, maşinile de spălat, ventilatoarele şi compresoarele frigiderelor şi aplicaţiile auto precum modulele de tractare şi de transmisie.
Motoarele pas cu pas
La fel ca la motoarele de curent continuu fără perii, căldura este generată în stator astfel că problema este uşor de soluţionat. Pentru motoarele pas cu pas viteza de operare este modificată prin controlul frecvenţei formei de undă aplicate motorului (semnalul CC este chopat). Principalele avantaje ale acestui tip de motor sunt raportul foarte bun cuplu / poziţie şi efortul de menţinere ce există când motorul nu este alimentat şi se află într-un câmp magnetic puternic. Dezavantajele (asociate motoarelor de curent continuu fără perii) sunt problemele de rezonanţă, o mai slabă eficienţă şi vibraţii înalte rezultate ca urmare a comportamentului oscilatoriu.
Produse tipice care utilizează motoarele pas cu pas sunt imprimantele, maşinile industriale, echipamentele de birou, driver-ele calculatoarelor, scanner-ele medicale, instrumentaţia ştiinţifică şi alte aplicaţii ce au nevoie de o poziţionare precisă şi un sistem de control al vitezei economic.
Motoarele cu reluctanţă comutată
Motoarele cu reluctanţă comutată sunt foarte robuste şi în acelaşi timp, datorită modului de construcţie simplu au un preţ de cost atractiv. Au un cuplu la pornire foarte bun şi un domeniu larg al vitezelor de operare. Alt avantaj al acestui tip de motor care îl propulsează înaintea altor tipuri de motoare este viteza mică în aplicaţii de poziţionare fără senzori. Din nefericire, motoarele cu reluctanţă generează un zgomot acustic mare şi nu lucrează corespunzător la vibraţii mari. Neliniarităţile magnetice provoacă dificultăţi controlului momentului la pornire.
Produsele tipice care utilizează motoare cu reluctanţă sunt maşinile de spălat, aspiratoarele cu praf, ventilatoarele industriale şi câteva bunuri de larg consum.
Motoarele de inducţie de curent alternativ
Motoarele de inducţie de curent alternativ prezintă cele mai atractive costuri pentru clasa motoarelor cal-putere clasice cu operare în curent alternativ. Aceasta înseamnă că ele pot lucra fiind conectate direct la o priză de curent alternativ. Cuplul de pornire nu generează un zgomot mare, iar motoarele sunt foarte robuste (câtă vreme nu există magneţi permanenţi în construcţia lor). Principalele dezavantaje sunt ineficienţa la sarcini uşoare, iar controlul vitezei necesită ajustarea tensiunii statorului şi a frecvenţei. De asemenea, este dificil de realizat controlul poziţiei atunci când sunt cerute aplicaţii de orientare.
Produsele tipice care folosesc motoarele de inducţie de curent alternativ sunt maşinile de spălat, compresoarele, unităţile de aer condiţionat, pompele, sistemele de deschidere a uşilor de la garaj, driver-ele industriale, ventilatoarele de bucătărie şi maşinile industriale.
Soluţii de comandă şi control al motoarelor
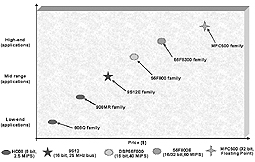
S-a stabilit că există diferite tipuri de motoare ce prezintă caracteristici diferite. Pe de altă parte, există o mulţime de tipuri de soluţii de comandă şi control al motoarelor. Motorola are diverse familii de produse (care acestea la rândul lor au foarte multe derivate) ce sunt utilizate în modulele de comandă şi control al motoarelor (Motor Control). Acestea sunt ilustrate în figura 1. Pentru aplicaţiile finale care necesită costuri mici este utilizată deseori familia de microcontrolere de 8 biţi M68HC08. Aplicaţiile medii sunt adesea implementate folosind familia de microcontrolere de 16 biţi M68HCS12 şi cu familia de controlere hibride 56F800. Un controler hibrid reprezintă un nou tip de arhitectură ce combină funcţionalitatea unui microcontroler tradiţional cu cea a unui procesor digital de semnal (DSP). Aplicaţiile de înalt nivel de comandă ale motoarelor sunt acoperite de familia de controlere hibride 56F8300 şi de familia microcontrolerelor de 32 de biţi, MPC500. Aceste produse operează într-o lărgime de bandă capabilă să acopere cerinţele complexe de timp real ale sistemului de control.
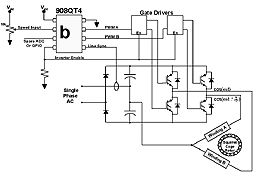
Figura 2 prezintă modulul de control al motorului pentru o aplicaţie tipică – maşină de spălat – realizat cu un microcontroler cu 8 pini 908QT4. Tipul motorului în acest caz este un motor de inducţie de curent alternativ.
Totodată, figura 2 ilustrează ieşirile microcontrolerului conectate la gate-driver-ele care generează un semnal suficient de mare pentru alimentarea tranzistoarelor driver din puntea ce comandă înfăşurările motorului.
Microcontrolerele sunt adesea preferate pentru comanda motoarelor deoarece setul de instrucţiuni este foarte prietenos şi intuitiv pentru un inginer proiectant de software. Instrucţiunile sunt de tip “comandă” şi există o varietate de moduri de adresare ce pot fi folosite pe orice microcontroler. Densitatea de cod este, tipic, mai mare (mai densă şi implicit mai eficientă) decât a unui DSP şi totodată, microcontrolerele sunt în general mai uşor de programat decât DSP-urile.
Există avantaje clare în folosirea controlerelor hibride precum cea a familiilor de dispozitive 56F800 sau 56F8300. Cea mai rapidă capabilitate MAC (Multiply and Accumulate) a acestor dispozitive permite filtrelor digitale să fie executate la viteze foarte mari. Acest lucru permite un control digital al vitezelor de eşantionare. Procesarea rapidă în matrice într-o arhitectură DSP sau hibridă permite facilităţi mai avansate privind algoritmii de control executaţi în timp real şi permite o procesare mai sofisticată a intrărilor senzorului (de exemplu filtrarea Kalman). Acest lucru ajută la creşterea performanţei sistemului de control al motorului, iar includerea unui senzor va mări fiabilitatea sistemului. Arhitectura hibridă prezintă în general o sumă a celor mai bune capabilităţi oferite de un microcontroler şi un DSP.
Concluzie
În concluzie, există nenumărate soluţii de comandă a motoarelor pentru sistemele utilizate în acest moment. Sistemele simple sau complexe tind să folosească microcontrolerele, iar sistemele cu un grad sporit de complexitate utilizează arhitectura DSP-urilor. Recent, disponibilitatea arhitecturilor hibride ce includ caracteristicile microcontrolerelor şi DSP-urilor a oferit proiectanţilor de sisteme noi opţiuni. În general, arhitectura hibridă reprezintă o bună soluţie atât timp cât sunt utilizate doar câteva componente (acesta este un factor de creştere a fiabilităţii deoarece mai puţine componente înseamnă o sursă mai mică de posibile defecte), proiectarea software se realizează simplu şi rapid, iar costul întregului sistem se micşorează. Niciodată ca acum nu au fost atâtea soluţii disponibile inginerilor proiectanţi de sisteme de comandă ale motoarelor.
de Ross Bannatyne, Motorola SPS
rbannatyne@austin.rr.com