

 Introducere
Introducere
Acest articol, referitor la tehnologia Automotive Audio Bus® (A2B®), explică progresele recente înregistrate în domeniul microfoanelor digitale și tehnologiilor de conectivitate. Aceste inovații permit adoptarea rapidă a unor aplicații care schimbă regulile jocului pentru generațiile viitoare de sisteme de infotainment pentru vehicule.
Piețe și spectrul aplicațiilor
În segmentul electronicelor din habitaclul automobilelor, devine tot mai evident că universul aplicațiilor audio, vocale și acustice se extinde rapid, pe măsură ce producătorii de automobile încearcă să își diferențieze vehiculele de cele ale concurenței. În plus, în condițiile în care consumatorii obișnuiți devin din ce în ce mai versați în domeniul tehnologiei, așteptările lor legate atât de experiența de conducere, cât și de nivelul de interacțiune personală cu vehiculul se extind semnificativ. Sistemele de sunet de calitate ‘home theater’ sunt frecvente în toate categoriile de preț ale vehiculelor și sunt completate, în prezent, de sisteme sofisticate de tip ‘hands-free’ (HF) și de sisteme de comunicații în mașină (ICC – in-car communications). Mai mult, sistemele de anulare a zgomotului activ și a zgomotului de drum (ANC/RNC), care, în mod tradițional, au fost implementate doar în vehiculele premium de top, își fac loc, acum, în segmentele mai obișnuite și mai accesibile. Privind în viitor, tehnicile audibile sau bazate pe acustică vor deveni o componentă critică în unitățile de control al motorului (ECU – Engine Control Unit) ale vehiculelor autonome de Nivel 4/Nivel 5, în încercarea acestora de a detecta prezența vehiculelor de urgență.
Liantul comun al tuturor acestor aplicații tradiționale și emergente este dependența de tehnologia de detectare acustică de înaltă performanță, cum ar fi microfoanele și accelerometrele. Și, deoarece aproape toate aplicațiile emergente necesită senzori acustici multipli, cum ar fi microfoanele (sau ariile de microfoane), pentru a obține cea mai bună performanță la nivel de sistem, este necesară o tehnologie de interconectare simplă și rentabilă, pentru a se asigura că totalul costurilor sistemului este redus la minimum. În trecut, lipsa unei tehnologii de interconectare optimizate pentru microfoane a reprezentat un punct de dificultate semnificativ pentru producătorii de automobile, deoarece fiecare microfon trebuia să fie conectat direct la unitatea de procesare folosind un cablu analogic ecranat scump și greu. Aceste costuri suplimentare – în primul rând în ceea ce privește cablarea propriu-zisă, iar în al doilea rând în ceea ce privește greutatea suplimentară precum și reducerea eficienței consumului de combustibil – au împiedicat, în multe cazuri, adoptarea pe scară largă a acestor aplicații sau cel puțin le-au limitat doar la segmentele super-premium. Progresele recente în ceea ce privește atât microfonul digital, cât și tehnologiile de conectivitate se dovedesc a fi factori favorizanți pentru adoptarea rapidă a aplicațiilor de schimbare a jocului în viitoarele generații de sisteme de infotainment pentru vehicule. Tehnologia A2B va face diferența.
Microfoane analogice tradiționale – implementări și limitări
Utilizarea unui telefon mobil în timpul condusului unui vehicul este interzisă în majoritatea țărilor, în timp ce dispozitivele hands-free cu Bluetooth® au devenit echipamente standard în aproape toate vehiculele. Este disponibilă o gamă largă de soluții hands-free, de la simple unități de sine stătătoare care conțin un difuzor și un microfon până la soluții avansate complet integrate în sistemul de infotainment al vehiculului. Până de curând, majoritatea sistemelor hands-free erau implementate într-un mod foarte asemănător. Acestea erau compuse dintr-un singur microfon (rareori două), iar tehnologia asociată microfonului era de tipul microfonului cu condensator electret (ECM), vechi de 50 de ani. Calitatea vocii transmise era adesea nesatisfăcătoare, în special în cazul unităților simple și autonome, unde distanța dintre microfon și gura vorbitorului putea fi destul de mare. Calitatea comunicației ar putea fi îmbunătățită dacă microfonul ar fi montat cât mai aproape posibil de gură (de exemplu, în plafonul vehiculului). Totodată, în acest caz, ambele scaune din față necesită microfoane individuale, dacă se dorește ca șoferul și pasagerul să fie susținuți în mod egal.
Un ECM tipic pentru automobile este un dispozitiv care combină o capsulă ECM cu un mic circuit amplificator într-o singură carcasă. Amplificatorul livrează un semnal analogic cu un nivel de tensiune care permite transportul pe cabluri cu o lungime de câțiva metri, așa cum este necesar în instalațiile tipice pentru automobile. Fără amplificare, semnalul ECM original ar fi prea mic pentru o astfel de lungime de cablu, deoarece raportul semnal/zgomot (SNR) s-ar degrada prea mult din cauza interferențelor electromagnetice de pe cablu. Chiar și semnalul amplificat necesită o cablare ecranată, care este, de regulă, un cablu cu 2 fire cu o polarizare (8V) care alimentează dispozitivul microfonului. Având în vedere astfel de cerințe de cablare, este evident că numărul de dispozitive ECM utilizate în vehiculele obișnuite este limitat din cauza constrângerilor legate de greutate și de costul sistemului.
Unul dintre puținele avantaje ale ECM-urilor este direcționalitatea acustică încorporată, care este de obicei ajustată la un model polar super- sau hipercardioid (un microfon MEMS poate fi, de asemenea, unidirecțional, dar necesită, de obicei, o proiectare acustică mai complexă). Uzual, se poate obține o atenuare de 10dB sau mai mult în sens invers, unde “invers” înseamnă direcția spre parbriz, de unde provine doar zgomotul (adică nu și semnalele dorite, cum ar fi vocea celui care vorbește). A avea o sensibilitate mai mare în direcția de intrare a semnalului dorit este foarte benefică pentru a crește SNR-ul. Cu toate acestea, capsulele ECM direcționale introduc efecte secundare nedorite, cum ar fi caracteristica trece-sus în care sensibilitatea scade la frecvențe mai mici. Frecvența de tăiere de 3dB a unui astfel de răspuns trece-sus este de obicei cuprinsă între 300Hz și 350Hz. La începuturile tehnologiei HF (High Frequency), acest comportament high-pass era un avantaj, deoarece zgomotul motorului era prezent în principal la frecvențe mai joase, astfel încât sunetul motorului era deja atenuat prin microfon. Cu toate acestea, odată cu apariția telefoniei în bandă largă, sau HD (High Definition), comportamentul trece-sus începe să devină o problemă. Într-o convorbire în bandă largă, lățimea de bandă efectivă este mărită de la 300Hz … 3400Hz, la 100Hz … 7000Hz. Filtrul trece-sus încorporat al microfonului face necesară amplificarea semnalelor între 100Hz și 300Hz în unitatea de postprocesare, ceea ce nu ar trebui dacă microfonul ar oferi o lățime de bandă audio mai bună în primul rând. Un alt dezavantaj al tehnologiei ECM este variația semnificativă de la o componentă la alta în ceea ce privește sensibilitatea și răspunsul în frecvență. Este posibil ca toleranța de fabricație relativ mare a ECM-urilor să nu reprezinte o problemă pentru aplicațiile cu un singur microfon. Însă, în cazul în care mai multe microfoane sunt utilizate într-o aplicație de arie de microfoane cu spațiere mică, atunci potrivirea perfectă între microfoane este esențială pentru o performanță optimă a ariei. Într-un astfel de caz, ECM-urile pot fi utilizate cu greu. În plus, din punct de vedere al dimensiunii fizice, capsulele ECM tradiționale nu sunt, în general, potrivite pentru arii de microfoane cu factor de formă mic.
Ariile de microfoane au cunoscut o aplicabilitate pe scară largă, inclusiv în vehicule, deoarece pot oferi performanțe de direcționalitate similare, adesea superioare, în comparație cu ECM-urile tradiționale. Informațiile spațiale referitoare la direcțiile de impact ale sunetului pot fi extrase din semnalele microfonului folosind două sau mai multe microfoane adecvate, grupate într-o matrice (arie). Această clasă de algoritmi este adesea denumită “beamforming” (BF). Numele de “beamforming” (formare a fasciculului) este împrumutat din analogia cu tehnologia antenelor de tip “phased array”, în care un “fascicul” (beam) radio este format din emisia unei arii de antene focalizate într-o anumită direcție, folosind un algoritm simplu, pur liniar, de filtrare și de adunare. Deși nu există un astfel de fascicul într-o arie de microfoane, termenul de formare a fasciculului a devenit, de asemenea, foarte comun în domeniul prelucrării semnalelor de microfon, unde acoperă o gamă mult mai largă de algoritmi atât liniari, cât și neliniari, care permit o performanță și o flexibilitate mai mare decât simplul proces liniar de formare a fasciculului.
În plus față de procesarea BF, un semnal brut de microfon necesită aproape întotdeauna postprocesare, deoarece fiecare microfon HF captează atât semnalele vocale dorite, cât și perturbațiile din mediul înconjurător, cum ar fi cele din cabina unei mașini. Zgomotul produs de vânt, drum și motor deteriorează SNR, iar semnalele redate de difuzoare – denumite de obicei ecouri de difuzoare – sunt surse suplimentare de semnale nedorite. Pentru a reduce astfel de perturbații și a îmbunătăți calitatea vocii, sunt necesare tehnici elaborate de procesare a semnalelor digitale, denumite adesea anulare a ecoului acustic și reducere a zgomotului (AEC/NR). AEC îndepărtează sunetul difuzorului de microfon, care altfel ar fi transmis ca un ecou al vocii persoanei care vorbește la celălalt capăt al liniei. NR (Noise Reduction) reduce zgomotul de deplasare constant, crescând în același timp SNR-ul semnalului transmis. Deși au fost publicate de către Uniunea Internațională a Telecomunicațiilor (UIT) specificații elaborate (de exemplu, ITU-T P.1100 și P.1110) care definesc multe detalii de performanță ale unui sistem HF, impresia subiectivă a calității comunicației într-un apel provenit de la un vehicul în mișcare poate fi nesatisfăcătoare dacă procesarea AEC/NR este de calitate inferioară. Împreună cu algoritmul BF menționat anterior, pachetul AEC/NR/BF permite o gamă largă de aplicații noi, toate legate de un anumit nivel de procesare a semnalelor audio digitale. Pentru a susține aceste aplicații, este necesară o nouă generație de microfoane care să depășească dezavantajele ECM-urilor tradiționale.
Microfoane digitale MEMS – Avantaje tehnice și de performanță
Tehnologia sistemelor microelectromecanice (MEMS) devine rapid noul standard industrial pentru microfoane, deoarece oferă numeroase avantaje față de ECM-urile tradiționale. În primul rând, MEMS permite un senzor de sunet cu factor de formă mult mai mic decât capsulele ECM existente. În plus, integrarea unui senzor MEMS cu un convertor analog-digital (ADC) într-un singur circuit integrat are ca rezultat un microfon digital care furnizează semnale pregătite pentru procesare AEC/NR/BF.
Microfoanele MEMS cu suport analogic, dar fără un ADC integrat, sunt de asemenea disponibile, însă acestea prezintă multe dintre dezavantajele ECM-urilor analogice și chiar necesită circuite de amplificare mai complexe decât ECM-urile, dacă sunt utilizate pe interfața analogică tradițională cu 2 fire. Doar cu o tehnologie de interfață complet digitală pot fi atenuate semnificativ problemele de interferență și SNR inerente cablurilor analogice. De asemenea, din punct de vedere al producției, microfoanele MEMS sunt preferate deoarece acestea pot fi produse cu o variație mult mai mică a caracteristicilor decât capsulele ECM, ceea ce este important pentru algoritmii BF. În sfârșit, în cazul microfoanelor MEMS IC, procesul de fabricație este mult simplificat, deoarece pot fi utilizate tehnici de montare automată, ceea ce reduce costurile generale de producție. Din perspectiva aplicațiilor, factorul de formă mai mic oferă cel mai mare avantaj și, datorită orificiilor foarte mici de pătrundere a sunetului, rețelele de microfoane MEMS pot fi făcute practic invizibile. Orificiul și canalul de sunet către senzor necesită o mare atenție în ceea ce privește proiectarea și calitatea producției. Dacă garnitura acustică nu este etanșă, zgomotul din structura interioară poate ajunge la senzor, iar scurgerile dintre doi senzori pot degrada performanța algoritmului BF. Spre deosebire de capsulele ECM tipice, care pot fi proiectate și fabricate pentru a fi atât omnidirecționale, cât și direcționale, elementele microfonului MEMS sunt aproape întotdeauna fabricate pentru a fi omnidirecționale (adică nu au o direcționalitate intrinsecă a recepției sunetului). Ca atare, microfoanele MEMS sunt senzori de presiune acustică omnidirecționali, care livrează semnale ideale pentru algoritmi BF avansați, în care direcțiile de atenuare și lățimile fasciculului pot fi configurate de utilizator prin intermediul software-ului.
De regulă, este foarte important ca toate modulele de procesare a semnalului să fie grupate într-o suită de algoritmi integrată. Latențele de procesare ar crește inutil, iar performanța generală a sistemului ar fi degradată dacă blocurile funcționale ar fi implementate izolat unul de celălalt. De exemplu, un algoritm BF ar trebui implementat întotdeauna împreună cu AEC-ul și, ideal, de la același furnizor. În cazul în care algoritmul BF introduce efecte neliniare asupra semnalului, AEC va produce cu siguranță rezultate nesatisfăcătoare. Rezultatele ideale ale procesării digitale a semnalelor pot fi obținute cel mai bine printr-un pachet de algoritmi integrat, care primește semnale de microfon nealterate.
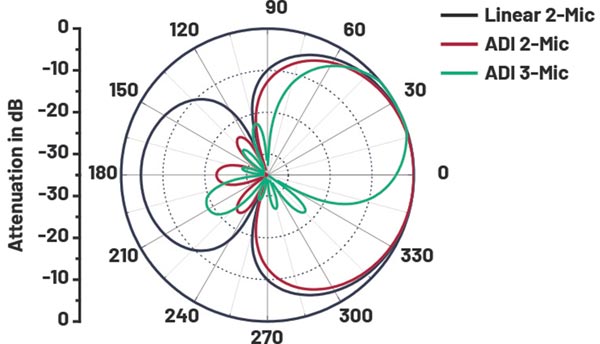
Figura 1. Caracteristica atenuării polare pentru diverși algoritmi BF. (© ADI)
Algoritmii liniari standard BF și cei proprietari ADI sunt comparați mai jos în detaliu pentru a înțelege pe deplin potențialul de performanță al algoritmilor BF avansați. Diagramele din figura 1 prezintă trei algoritmi BF diferiți în ceea ce privește caracteristicile polare și răspunsul în frecvență, atât în interiorul fasciculului, cât și în afara acestuia. Un algoritm supercardioid liniar standard bazat pe o rețea de 2 microfoane servește ca referință (curbele negre). Curba de referință prezintă atenuarea maximă în direcțiile tipice cu unghi zero (adică atenuarea maximă în afara fasciculului) și un “lob posterior” la 180°, unde atenuarea în afara fasciculului este mai mică. Lobul din spate rezultat este un compromis cu lățimea fasciculului într-un algoritm liniar. Un fascicul cardioid (nu este ilustrat) are atenuarea maximă exact la 180°; cu toate acestea, zona sa de recepție este mai largă decât o configurație hiper- sau supercardioidă. Fascicule cu lobi posteriori mai puțin semnificativi și o atenuare mai mare în afara fasciculului pot fi obținute cu abordări algoritmice neliniare, curba roșie ilustrând un algoritm cu 2 microfoane, marca ADI (cu spațiere între microfoane de 20 mm).
În cazul a două microfoane omnidirecționale dintr-o rețea, există întotdeauna o simetrie rotațională a formei fasciculului. Cu alte cuvinte, atenuarea la X° în diagrama polară este aceeași ca la 360° – X°. Acest lucru presupune că linia de la 0° la 180° din diagrama polară este echivalentă cu linia imaginară care leagă cele două microfoane. Forma tridimensională a fasciculului poate fi imaginată prin rotirea diagramei polare 2D în jurul acestei axe a microfonului. Formele asimetrice ale fasciculului fără simetrie rotațională sau fasciculele mai înguste necesită cel puțin trei microfoane dispuse în triunghi. De exemplu, într-o instalație standard pentru consola de deasupra capului, o rețea de 2 microfoane poate atenua sunetul de la parbriz. Cu toate acestea, într-o astfel de orientare, o arie de 2 microfoane nu poate face distincția dintre șofer și pasager. Rotirea ariei cu 90° ar face posibilă o astfel de diferențiere șofer/pasager, dar zgomotul de la parbriz nu ar putea fi distins dintre sunetele produse în interiorul cabinei. Atât atenuarea zgomotului dinspre parbriz, cât și diferențierea șoferului/pasagerului sunt posibile doar cu ajutorul a trei sau mai multe microfoane omnidirecționale configurate într-o rețea (arie). O caracteristică polară reprezentativă a unui algoritm de 3 microfoane, marca ADI, este dată de curba verde din figura 1, în care microfoanele sunt dispuse într-un triunghi cu laturi egale, la o distanță de 20 mm.
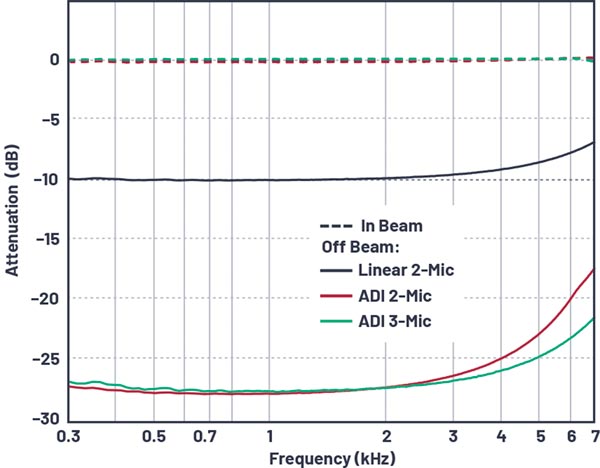
Figura 2. Răspunsurile în frecvență în fascicul (linii punctate) și în afara fasciculului (linii îngroșate) ale diverșilor algoritmi BF. (© ADI)
Diagramele polare sunt calculate cu zgomot alb cu bandă limitată care ajunge la grupul de microfoane sub unghiuri diferite. Lățimea de bandă audio este limitată între 100Hz și 7000Hz și corespunde cu lărgimea de bandă (sau voce HD) a rețelelor de telefonie mobilă de ultimă generație. Figura 2 compară curbele de răspuns în frecvență ale diferitelor tipuri de algoritmi. În interiorul fasciculului, răspunsul în frecvență al tuturor algoritmilor este, așa cum era de așteptat, plat în limita lățimii de bandă audio dorite. Răspunsurile în frecvență în afara fasciculului sunt calculate pentru semispațiul din afara fasciculului (de la 90° la 270°), confirmând o atenuare ridicată în afara fasciculului pe o gamă largă de frecvențe.
Relația dintre spațierea microfoanelor și lățimea de bandă audio în funcție de rata de eșantionare merită o discuție suplimentară. Tehnologia HD-voice (High Definition voice) utilizează o frecvență de eșantionare de 16 kHz, care este o alegere bună pentru transmiterea vorbirii. Există o diferență uriașă în ceea ce privește calitatea vocii și inteligibilitatea vorbirii între rata de eșantionare actuală de 16 kHz în bandă largă și cea de 8 kHz, care a fost utilizată în generațiile anterioare de sisteme de bandă îngustă. Stimulată de furnizorii de tehnologii de recunoaștere a vorbirii, există o cerere tot mai mare pentru frecvențe de eșantionare chiar mai mari, cum ar fi 24 kHz sau 32 kHz. Și se pot găsi specificații în care frecvența de eșantionare a aplicației în banda de voce ar trebui să fie de până la 48 kHz, care este de obicei frecvența de eșantionare audio a sistemului primar. Motivația care stă la baza acestui lucru este evitarea oricărei conversii interne a ratei de eșantionare. Cu toate acestea, resursele de calcul suplimentare necesare pentru a susține aceste rate de eșantionare ridicate nu pot fi justificate de un avantaj audibil tangibil, astfel încât 16 kHz sau 24 kHz sunt acum acceptate pe scară largă ca rate de eșantionare recomandate pentru majoritatea aplicațiilor în banda de voce.
Frecvențele de eșantionare ridicate sunt problematice pentru aplicațiile BF, deoarece se produce o suprapunere spațială la frecvențe egale cu viteza sunetului împărțită la dublul distanței dintre microfoane. Suprapunerea spațială este un fenomen nedorit, deoarece nu este posibil să se realizeze BF la asemenea frecvențe de suprapunere. În cazul unui sistem în bandă largă (frecvență de eșantionare de 16 kHz), se poate evita suprapunerea spațială dacă distanța dintre microfoane este limitată la 21 mm sau mai puțin. Frecvențele de eșantionare mai mari necesită o spațiere mai mică pentru a evita suprapunerea spațială. Cu toate acestea, o distanță prea mică între microfoane este, de asemenea, nerecomandată, deoarece toleranțele microfonului și, în special, zgomotul intrinsec (non-acustic) al senzorilor microfonului pot reprezenta o problemă. Diferențele de semnal dintre microfoanele unei matrice devin minore dacă spațierea este mică, iar perturbațiile, cum ar fi zgomotul intrinsec și abaterile de sensibilitate dintre microfoane, pot acoperi diferența de semnal dintre microfoane. În practică, distanța dintre microfoane nu trebuie să fie mai mică de 10 mm.
Autori:
Ken Waurin, Strategic Marketing Manager la Analog Devices Inc.
Dietmar Ruwisch, Senior Audio Technologist la Analog Devices, Inc.
Yu Du, Senior Principal Acoustic Engineer la Harman International Industries
Despre autori:
 Ken Waurin este Strategic Marketing Manager la Analog Devices, în cadrul căreia deține responsabilitatea generală pentru tehnologia Automotive Audio Bus (A2B). De când s-a alăturat companiei ADI în 1996, el a ocupat funcții de management de produs, de dezvoltare a afacerilor, de marketing tactic și strategic care acoperă mai multe domenii tehnologice, inclusiv DSP, MEMS, convertoare, video și conectivitate. Prioritatea sa principală vizează infotainment-ul auto și aplicațiile emergente care conduc la diferențierea vehiculelor, cum ar fi sistemul audio premium, anularea zgomotului rutier și comunicațiile zonale la bordul vehiculelor. Poate fi contactat la adresa de email: kenneth.waurin@analog.com.
Ken Waurin este Strategic Marketing Manager la Analog Devices, în cadrul căreia deține responsabilitatea generală pentru tehnologia Automotive Audio Bus (A2B). De când s-a alăturat companiei ADI în 1996, el a ocupat funcții de management de produs, de dezvoltare a afacerilor, de marketing tactic și strategic care acoperă mai multe domenii tehnologice, inclusiv DSP, MEMS, convertoare, video și conectivitate. Prioritatea sa principală vizează infotainment-ul auto și aplicațiile emergente care conduc la diferențierea vehiculelor, cum ar fi sistemul audio premium, anularea zgomotului rutier și comunicațiile zonale la bordul vehiculelor. Poate fi contactat la adresa de email: kenneth.waurin@analog.com.
 Dietmar Ruwisch este Senior Audio Technologist la Analog Devices. A studiat fizica la Münster, Germania și a obținut doctoratul în 1998 cu o teză despre rețele neuronale artificiale. De atunci, domeniul său cheie a fost procesarea semnalelor audio, unde deține mai multe brevete. Se concentrează pe îmbunătățirea calității comunicației audio – fie între oameni, fie cu o mașină – și pe procesarea corespunzătoare a semnalelor provenite de la microfon și de la arii de microfoane. Poate fi contactat la adresa de email: dietmar.ruwisch@analog.com.
Dietmar Ruwisch este Senior Audio Technologist la Analog Devices. A studiat fizica la Münster, Germania și a obținut doctoratul în 1998 cu o teză despre rețele neuronale artificiale. De atunci, domeniul său cheie a fost procesarea semnalelor audio, unde deține mai multe brevete. Se concentrează pe îmbunătățirea calității comunicației audio – fie între oameni, fie cu o mașină – și pe procesarea corespunzătoare a semnalelor provenite de la microfon și de la arii de microfoane. Poate fi contactat la adresa de email: dietmar.ruwisch@analog.com.
 Yu Du este Senior Principal Acoustic Engineer la Harman International Industries. Este licențiat și masterand în ingineria vehiculelor la Universitatea Tsinghua (Beijing, China) și a obținut doctoratul în inginerie mecanică la Virginia Tech (Blacksburg, Virginia). Experiența sa în cercetare și dezvoltare de peste 20 de ani în diverse domenii ale acusticii include acustica structurală, controlul activ și pasiv al vibrațiilor și al zgomotului, proiectarea și simularea transductoarelor MEMS, știința auzului și prelucrarea semnalelor acustice. Activitatea sa actuală la Harman se concentrează pe dezvoltarea tehnologiei avansate de microfoane și senzori pentru aplicații în domeniul auto. Dr. Du este membru al Societății de acustică din America (ASA), al Societății de inginerie audio (AES) și al Societății americane a inginerilor mecanici (ASME). În prezent, el face parte din Comitetul tehnic AES pentru domeniul audio destinat autovehiculelor.
Yu Du este Senior Principal Acoustic Engineer la Harman International Industries. Este licențiat și masterand în ingineria vehiculelor la Universitatea Tsinghua (Beijing, China) și a obținut doctoratul în inginerie mecanică la Virginia Tech (Blacksburg, Virginia). Experiența sa în cercetare și dezvoltare de peste 20 de ani în diverse domenii ale acusticii include acustica structurală, controlul activ și pasiv al vibrațiilor și al zgomotului, proiectarea și simularea transductoarelor MEMS, știința auzului și prelucrarea semnalelor acustice. Activitatea sa actuală la Harman se concentrează pe dezvoltarea tehnologiei avansate de microfoane și senzori pentru aplicații în domeniul auto. Dr. Du este membru al Societății de acustică din America (ASA), al Societății de inginerie audio (AES) și al Societății americane a inginerilor mecanici (ASME). În prezent, el face parte din Comitetul tehnic AES pentru domeniul audio destinat autovehiculelor.
− Continuare în numărul viitor −
![]()
Vizitați https://ez.analog.com
Contact România:
Email: inforomania@arroweurope.com
Mobil: +40 731 016 104
Arrow Electronics | https://www.arrow.com
![]()