

Adăugarea de sensibilitate tactilă a devenit foarte populară în tehnologia electronică şi mobilă datorită aspectului estetic şi uşor de utilizat. Pentru producători, ea aduce beneficiul că nu implică mişcare mecanică de vreme ce sensibilitatea tactilă capacitivă poate fi implementată prin utilizarea unui suport de cupru pe un design standard PCB.
În acest articol vor fi descrise modul prin care pot fi utilizate o tehnică CVD (Capacitance Voltage Divider- divizor capacitate tensiune) şi un periferic de microcontroler numit CTMU (Charge Time Measurement Unit – unitate de măsurare a timpului de încărcare) pentru a implementa sensibilitate tactilă capacitivă economică cu un minim de componente externe. În cele din urmă va fi prezentat un proiect de referinţă despre cum să fie înlocuite comutatoarele mecanice cu taste tactile capacitive.
de Nithin Kumar Mada (Inginer principal de aplicaţii) şi Harsha Jagadish (Inginer de aplicaţii), Divizia de Microcontrolere de înaltă Performanţă, Microchip Technology Inc.
Tehnologia de detecţie tactilă capacitivă
Rotiţa de derulare cu senzor capacitiv devine prevalentă în dispozitivele electronice în comparaţie cu alte tehnologii de detecţie tactilă.
Principiile detecţiei tactile capacitive
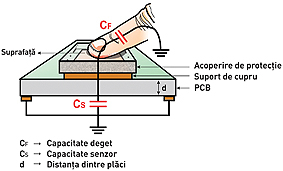
Dacă un deget – sau orice alt obiect cu caracteristici capacitive – vine în apropierea unui senzor tactil capacitiv, el se comportă ca un alt condensator. Acest lucru este cauzat de natura dielectrică a senzorului care variază capacitatea efectivă a sistemului utilizat să detecteze atingerea.
În figura 1 este prezentată modalitatea în care o armătură paralelă este conectată la intrarea pentru senzor a cipului, în vreme ce degetul acţionează ca una dintre armăturile paralele. Conţinutul de fier al sângelui creează şiruri de condensatoare la suprafaţa corpului. Când aceste şiruri vin în apropierea unui conductor ele creează un condensator legat la masă, iar acest lucru conduce la o schimbare a tensiunii măsurate, determinând atingerea.
Un sistem de detecţie tactilă capacitivă standard conţine trei blocuri funcţionale principale:
• Un bloc analogic pentru detecţie capacitivă;
• Un controler pentru procesarea datelor;
• Un bloc de interfaţare pentru comunicaţie cu procesorul gazdă.
Soluţiile de detecţie tactilă capacitivă bazate pe variaţiile de tensiune pot fi implementate eficient utilizând următoarele tehnici:
– Perifericul CTMU de pe cipul unui microcontroler;
– Tehnica CVD, utilizând convertorul analog-digital (ADC) ce nu necesită un periferic dedicat pentru detecţie capacitivă.
* Implementarea eficientă a detecţiei tactile capacitive utilizând perifericul CTMU
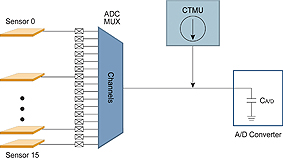
Un periferic CTMU lucrează în conjuncţie cu un convertor ADC ca modul analogic flexibil pentru măsurarea precisă a capacităţii. După cum demonstrează figura 2, el conţine o sursă de curent constant legată la canalul ADC. Schimbările de capacitate şi diferenţa de timp dintre evenimente este calculată de CTMU utilizând o sursă de curent constant.
CTMU furnizează un răspuns mai rapid prin comparaţie cu CVD, deoarece el are diferite game ale sursei de curent. Timpul de răspuns al sistemului de detecţie tactilă capacitivă este de aceea îmbunătăţit de încărcarea mai rapidă a canalelor analogice.
Următoarea ecuaţie descrie utilizarea unui periferic CTMU pentru detecţia tactilă capacitivă:
I × T = C × V
Unde:
• I este sursa de curent constant a CTMU.
• T este perioada fixă în care CTMU încarcă senzorul tactil capacitiv.
• C este capacitatea senzorului tactil capacitiv
• V este tensiunea de pe senzorul tactil capacitiv, după cum este citită de ADC.
Dacă ecuaţia este rearanjată se poate observa că o modificare relativă a capacităţii poate fi detectată prin observarea unei schimbări a tensiunii:
C = (I × T)/V
Această ecuaţie evidenţiază paşii implicaţi în detecţia tactilă după cum urmează:
• Senzorul tactil capacitiv acţionează ca un condensator şi este conectat la un canal multiplexat cu perifericul CTMU şi ADC.
• Senzorul tactil este iniţial încărcat de la o sursă de curent constant pentru o perioadă fixă de timp (T). Tensiunea (V) prin senzor este măsurată utilizând ADC (Figura 3).
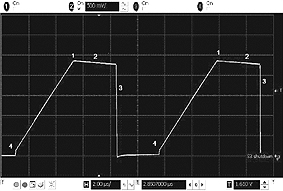
• Atâta vreme cât nu sunt schimbări de capacitate datorate atingerii suportului senzorial, această tensiune rămâne relativ constantă în iteraţiile succesive de măsurare a încărcării.
În conjuncţie cu un ADC multi-canal, disponibilitatea unei surse de curent constant în perifericul CTMU oferă o platformă eficientă pentru interfaţarea la un senzor tactil capacitiv. Perifericul CTMU este conectat direct la intrarea ADC, astfel încât el se poate conecta la orice pin prin multiplexorul analogic. Cu această configuraţie, un singur CTMU poate măsura un număr de senzori egal cu numărul de canale analogice.
Calibrarea pentru măsurarea interferenţelor externe şi pierderilor de transmisie este facilitată de biţii de ordine asociaţi cu sursa curentă.
*Notă: Pentru mai multe informaţii despre perifericul CTMU puteţi citi nota de aplicaţie Microchip cu numărul AN1250, “CTMU pentru aplicaţii tactile capacitive.”
**
CVD pentru detecţie tactilă capacitivă
Pentru comparaţia condensatorului intern fix cunoscut cu senzorul capacitiv variabil necunoscut, metoda CVD (divizorului de tensiune capacitiv) utilizează numai convertorul ADC pentru a măsura o tensiune.
CVD este construit în acelaşi mod ca un senzor tipic; o suprafaţă de cupru pe un PCB sau un suport conductiv similar, legat direct la un canal ADC. Restul procesului este completat prin configuraţia precisă a ADC şi I/O într-o manieră specifică.
Principiile de bază pe care le presupune divizorul de tensiune capacitiv sunt:
• Un canal ADC încarcă condensatorul intern sample-and-hold de la ADC cu VDD.
• Canalul senzorial este legat apoi la masă, pentru a-l aduce la o stare cunoscută. (Figura 4)
• După legarea la masă, senzorul trebuie făcut din nou o intrare.
• După ce este făcut intrare, canalul ADC este imediat comutat la senzor.
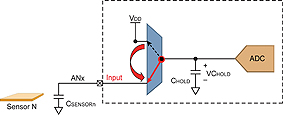
Deoarece senzorul capacitiv este în paralel cu condensatorul intern CHOLD, se creează un divizor de tensiune. Ca rezultat, tensiunea pe condensatorul senzorial este aceeaşi cu cea de pe condensatorul intern fix.
ADC trebuie să fie eşantionat, iar apoi citirile reprezintă rapoarte între condensatoare.
Atunci când un deget atinge senzorul, capacitatea acestuia va creşte; tensiunea pe senzor va fi mai mică, iar citirile ADC vor creşte.
O citire absolută a capacităţii nu este cerută pentru detecţia tactilă capacitivă deoarece toate deciziile de decodare sunt legate de citirile de bază.
**Notă: Pentru mai multe informaţii despre tehnica CVD puteţi citi nota de aplicaţie Microchip cu numărul AN1298, “Sensibilitate tactilă capacitivă utilizând numai ADC (CVD).”
Dezvoltarea firmware-ului pentru eliminarea interferenţelor externe
Fluctuaţiile dinamice ale capacităţii sunt cauzate de factori precum: umiditate, căldură, extinderea atingerii, contaminanţii pe senzori şi interferenţe EMI/ EMC ce au impact asupra capabilităţilor tactile capacitive ale sistemului.
Firmware-ul poate implementa o detecţie medie dinamică, atenuare, variaţie dinamică cu excursie de nivel, care pot fi utilizate pentru a determina aceşti factori şi a face sistemul mai robust.
Conceptul de filtrare software trebuie încorporat pentru ca sistemul să reziste zgomotului rezidual de pe suportul senzorial; acesta permite ca firmware-ul să facă distincţie între o condiţie de atingere şi una de neatingere. Algoritmul poate fi proiectat pentru a detecta condiţii multiple de atingere, pentru a face distincţie între atingere intenţionată şi neintenţionată. Software-ul poate fi apoi calibrat pentru a detecta o atingere chiar şi dacă este o acoperire subţire pe suportul tactil capacitiv.
Schemă de referinţă pentru aplicaţii senzoriale capacitive
Figura 5 îi va ajuta pe utilizatori să înceapă imediat dezvoltarea unui sistem tactil capacitiv. Abordarea oferă o flexibilitate extinsă în interfaţarea cu alte periferice precum USB şi LCD în proiect. Această schemă poate ajuta de asemenea la reducerea intervalului de timp dintre stabilirea sarcinii şi apariţia rezultatelor, adică sistemul tactil în funcţiune.
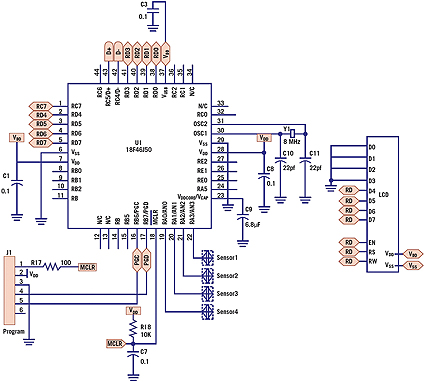
Microcontrolerul utilizat în schema de referinţă are 13 canale ADC pentru conectarea la un maxim de 13 senzori tactili. Patru senzori tactili capacitivi sunt conectaţi la porturile A0 – A3.
Modulul CTMU are o sursă de curent programabilă care este utilizată pentru încărcarea senzorilor tactili capacitivi. Conectorul USB este utilizat pentru alimentarea aplicaţiei ca dispozitiv de magistrală de alimentare care utilizează un motor USN pe cip. Firmware-ul poate furniza feedback prin afişarea stării senzorului tactil în modulul LCD comandat de pini în portul D când senzorul este apăsat. Este oferit un conector cu 6 pini pentru conectarea plăcii de referinţă la un programator hardware.
Factori ce contribuie la proiecte tactile capacitive eficiente*
Aplicaţiile de timp real prezintă o serie de provocări pentru sensibilitatea tactilă capacitivă. Proiectarea poate ajuta la reducerea capacităţii parazite şi creşterea capacităţii generate de deget, asigurând astfel un design senzorial mai bun:
• Dimensiunea suportului senzorial. Forma suportului senzorial nu este importantă pentru un senzor capacitiv, dar suprafaţa suportului determină sensibilitatea şi de aici consideraţiile de garantare. Cu cât suportul este mai mare, cu atât sensibilitatea este mai mare; aria trebuie să fie de dimensiunea medie a atingerii unui deget (15 mm × 15 mm), dar dacă dimensiunea suportului senzorial este mai mare decât cea optimă, capacităţile parazite pot creşte datorită proximităţii legării la masă.
• Separarea între senzori. Când un senzor este atins, degetul introduce o capacitate suplimentară nu numai pe senzorul curent, dar de asemenea şi pe senzorii învecinaţi. De aceea, pentru a evita această problemă trebuie păstrat un spaţiu între 2 senzori adiacenţi.
Ideal, separarea trebuie să fie de 2-3 ori grosimea materialului ce acoperă sistemul de detecţie tactilă capacitivă. De exemplu, dacă grosimea materialului acoperitor este de 3 mm, distanţa între senzori trebuie să fie de la 6 mm la 9 mm, pentru un design eficient de detecţie tactilă capacitivă.
• Lungimea traseului. Lungimea traseului dintre senzor şi microcontroler poate crea o mai mare susceptibilitate la capacitate parazită dacă este prea lung. Aceasta poate schimba rezistenţa traseului şi va afecta sensibilitatea. Ideal, lungimea traseului nu trebuie să depăşească 300 mm.
• Compoziţia şi grosimea materialului acoperitor. Capacitatea unui deget transmisă senzorului tactil capacitiv este determinată de materialul acoperitor utilizat şi de grosimea sa. Acest material trebuie să aibă o constantă dielectrică ridicată pentru a creşte sensibilitatea şi să fie cât de subţire este posibil. Dacă grosimea materialului creşte, atunci efectul de interferenţă între senzori creşte.
• Tehnici de legare la masă. Metoda de detecţie este afectată de capacităţi parazite ale senzorului la masă; acest lucru poate fi inversat prin plasarea masei foarte aproape de senzor. Astfel creşte capacitatea parazită şi reduce efectul său asupra senzorului.
• Selectarea unui adeziv. Adezivul asigură materialul acoperitor pe PCB şi trebuie ţinut subţire pentru a păstra ridicată sensibilitatea. Nu trebuie să existe bule de aer la aplicarea adezivului şi toate instrucţiunile de lipire trebuie studiate înaintea aplicării.
Sumar
Datorită scăderii costurilor tehnologiei de detecţie tactilă, aceasta a devenit o alegere ideală pentru produsele industriale şi de consum. Principalul avantaj faţă de comutatoarele mecanice tradiţionale este acela că senzorii tactili capacitivi nu se uzează după o lungă perioadă de timp.
Prin utilizarea perifericului CTMU de pe cipul microcontrolerului sau a tehnicii CVD, proiectanţii pot implementa interfeţe de detecţie tactilă capacitivă cu costuri mici şi număr minim de componente.
Pentru mai multe informaţii, vizitaţi pagina web: http://www.microchip.com/mtouch
**Notă: Pentru mai multe informaţii asupra diferiţilor factori care afectează proiectele hardware şi software puteţi citi nota de aplicaţie Microchip cu numărul AN1334, “Tehnici pentru un proiect cu detecţie tactilă robustă.”
Referinţe
1. PIC24F Family Reference Manual, Sect. 11 Charge Time Measurement Unit (CTMU), DS39724B, © 2010 Microchip Technology Inc.
2. Note de aplicaţie Microchip:
• AN1101, “Introduction to Capacitive Sensing,” de Tom Perme. © 2007 Microchip Technology Inc.:
• AN1334, “Techniques for Robust Touch Sensing Design,” de Burke Davison © 2010 Microchip Technology Inc.
• AN1250, “Microchip CTMU for Capacitive-Touch Applications,” de Bruce Bohn. © 2009 Microchip Technology Inc.
• AN1298, “Capacitive Touch Using Only an ADC (CVD)” de Tom Perme. © 2009 Microchip Technology Inc.
www.microchip.com