

Stabilizarea giroscopică precisă și rapidă a unor mijloace mobile terestre și aeriene constituie un criteriu de performanță foarte important în prezent. Sistemele moderne de comandă utilizează motoare de curent continuu fără perii (BLDC) comandate electronic prelucrând semnalele furnizate de traductoare Hall și de un calculator specializat. Articolul de față se referă la un circuit electronic de comandă a motoarelor de curent continuu fără perii pentru sisteme de poziționare stabilizate giroscopic.
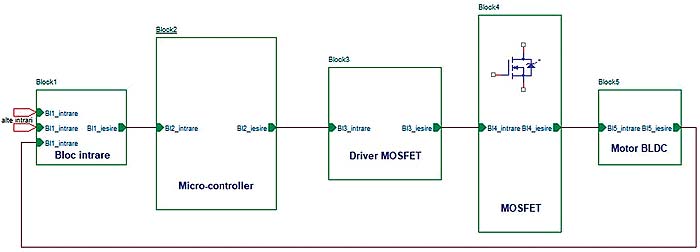
Figura 1: Schema bloc a circuitului de comandă a motoarelor BLDC
În ceea ce privește comanda, circuitele de comandă a turației motoarelor de curent continuu cu perii sunt simple și ușor de utilizat, fiind foarte populare în sistemele de control al motoarelor. Cu toate acestea, din cauza periilor, aceste motoare de curent continuu au o fiabilitate relativ scăzută și introduc semnale perturbatoare de amplitudine mare și frecvență aleatoare în cazul echipării lor pe mijloacele mobile terestre și aeriene. Motorul de curent continuu fără perii (BLDC) este un motor comandat electronic. Nu există perii pe rotor și comutarea este efectuată electronic la anumite poziții ale rotorului. Motorul BLDC este trifazic, fiind necesară alimentarea lui de la un circuit specializat, revendicat în prezenta cerere. Poziția rotorului trebuie să fie permanent cunoscută pentru a se aplica tensiunea corectă. Cuplul aproape constant la orice turație se obține cu ajutorul motoarelor BLDC prin intermediul unui controler și unor circuite de comandă specializate. Motoarele de acest tip sunt motoare trifazate comandate prin PWM, comandate în curent continuu pe fiecare fază în parte.
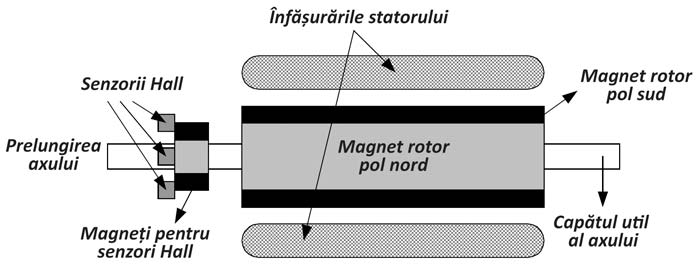
Figura 2: Secțiune transversală a unui motor BLDC [6]
Sistemul care beneficiază de avantajele motoarelor BLDC este, în cazul articolului de față, un sistem de poziționare stabilizat giroscopic destinat echipării mijloacelor mobile terestre și aeriene dezvoltat în cadrul unui proiect de cercetare.
Metoda de control cu senzori Hall
Cea mai obișnuită metodă de a controla un motor BLDC este de a folosi senzori Hall pentru a determina poziția rotorului. Figura 2 prezintă o secțiune transversală a unui motor BLDC cu rotor cu magneți permanenți. Senzorii Hall sunt încorporați în stator [1], [6], orice nealiniere între acești senzori și magneții rotorului generând o eroare în determinarea poziției rotorului. Pentru a simplifica procesul de montare a senzorilor Hall pe stator, unele motoare pot avea magneți pentru senzori pe rotor, în plus față de magneții principali ai rotorului. De fiecare dată când rotorul se rotește, magneții pentru senzorii Hall au același efect ca și magneții principali. Senzorii sunt montați pe o placă fixată pe capacul carcasei. Acest lucru permite utilizatorilor să regleze ansamblul complet de senzori Hall, pentru a se alinia cu magneții rotorului și pentru a obține cele mai bune performanțe. Funcție de poziția fizică a senzorilor Hall, există două posibilități: senzori defazați la 60° sau 120°. Astfel, producătorul motorului definește secvența de comutare care trebuie urmată pentru controlul motorului [1].
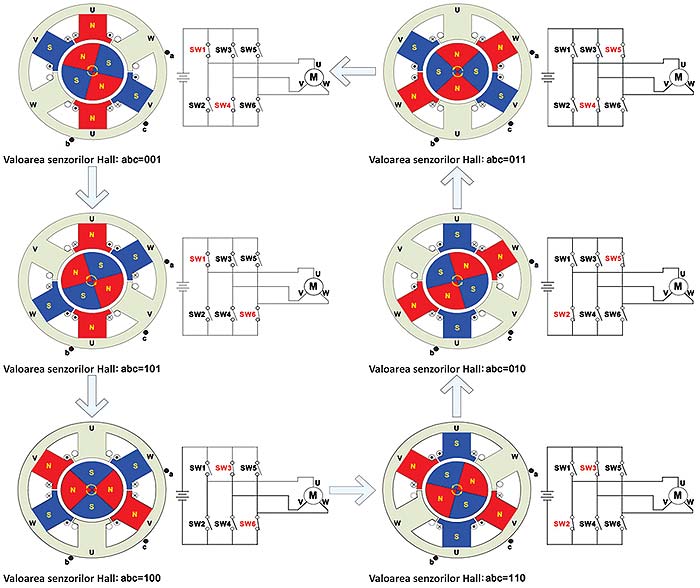
Figura 3: Motor trifazic BLDC [1], [6]
Principiul de funcționare
Procesul fizic care are loc în funcționarea motorului este același indiferent de schema de control utilizată. Fiecare secvență de comutare are una dintre înfășurări alimentată cu tensiune pozitivă (curentul intră în înfășurare), a doua înfășurare este alimentată cu tensiune negativă, iar a treia este nealimentată. Cuplul se produce datorită interacțiunii dintre câmpul magnetic generat de bobinele statorului și magneții permanenți. În mod ideal, cuplul maxim apare când aceste două câmpuri sunt la 90° unul față de celălalt. În scopul de a menține motorul în funcțiune, câmpul magnetic produs de înfășurări își schimbă poziția deoarece rotorul se deplasează pentru a ajunge din urmă câmpul statorului.
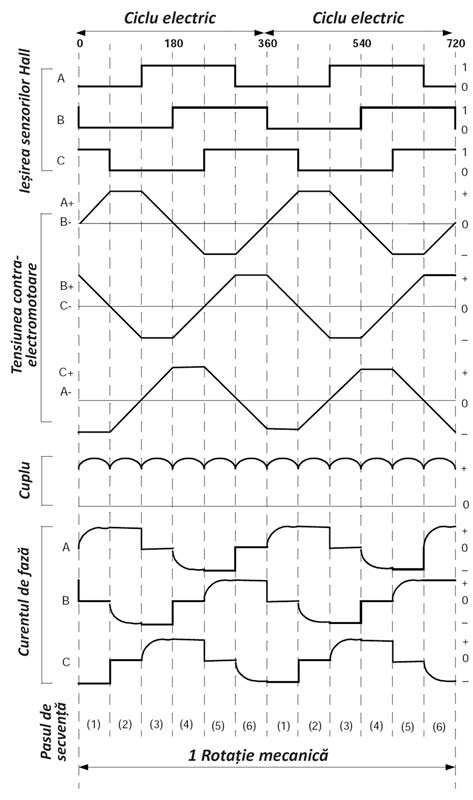
Figura 4: Secvența de comutație [1]
În conformitate cu figura 4, la fiecare 60°, unul din senzorii Hall își schimbă starea. Astfel, este nevoie de șase pași pentru a finaliza un ciclu.
Sincronizat, cu fiecare 60° electrice, curentul de fază se actualizează. Cu toate acestea, un ciclu electric poate să nu corespundă unei rotații mecanice complete a rotorului. Numărul de cicluri electrice care trebuie repetate pentru a finaliza o rotație mecanică este determinată de perechile de poli ale rotorului. Pentru fiecare pereche de poli se finalizează un ciclu electric. Astfel, numărul de cicluri electrice/rotație este egal cu numărul de perechi de poli ale rotorului.
În cazul în care semnalele marcate de PWMx sunt pornite sau oprite conform secvenței, motorul va funcționa la turația nominală. Acest lucru se face presupunând că tensiunea de alimentare este egală cu tensiunea nominală a motorului, plus pierderile pe comutatoare. Pentru a modifica viteza, aceste semnale trebuie modulate în durată (PWM) la o frecvență mult mai mare decât frecvența motorului, frecvența PWM trebuind să fie de cel puțin 10 ori mai mare decât frecvența maximă a motorului. Când factorul de umplere PWM este variat în cadrul secvențelor, variază tensiunea furnizată statorului, conducând la variația vitezei. Potențiometrul conectat la microcontroler este utilizat pentru setarea unei viteze de referință.
Autori:
Mihai Jurbă, Emil Popescu, Dănuţ Stroe
ELECTRO OPTIC COMPONENTS srl – office@electro-optic.ro
Alexandru Vasile, Norocel-Dragoș Codreanu, Ciprian Ionescu, Rodica Negroiu, Mihaela Pantazică
Universitatea POLITEHNICA din București – cetti@cetti.ro
Bibliografie
1. Brushless DC (BLDC) Motor Fundamentals AN885, http://ww1.microchip.com/downloads/en/AppNotes/00885a.pdf;
2. Controlling Sensorless, BLDC Motors via Back EMF https://www.digikey.in/en/articles/techzone/2013/jun/controlling-sensorless-bldc-motors-via-back-emf;
3. TLE987xQX https://www.infineon.com/dgdl/Infineon-TLE9879QXA40-UM-v01_03-EN.pdf?fileId=5546d4624e24005f014e52ca1628452c;
4.TLE9879 EvalKit V1.2 Users’ Manual https://www.infineon.com/dgdl/Infineon-TLE9879-EvalKit-UM-v01_00-EN.pdf?fileId=5546d4624e765da5014eb587aeb53373;
5. Nanotec DB42S03 https://en.nanotec.com/fileadmin/files/Datenblaetter/BLDC/DB42/DB42S03.pdf;
6. M. M. Chițu, “Evaluarea funcționării BLDC-urilor în sistemele electronice ale automobilelor”, lucrare de disertație, iulie 2018;
7. Cerere de brevet de invenție nr. A/00699 din 20.09.2018.
Continuare în numărul viitor