

 Acționarea servomotorului
Acționarea servomotorului
Un servomotor face parte dintr-un grup special de aplicații pentru motoare. Spre deosebire de aplicațiile simple ale motoarelor, cum ar fi pornirea, oprirea sau menținerea unei viteze constante, aplicațiile servo acoperă sarcini mai complicate. Acestea controlează cu precizie o mașină și îi permit să urmeze o mișcare calculată în timp și spațiu. Brațele robotizate cu mai multe axe necesită chiar și mai multe motoare cu control sincronizat pentru a deplasa brațul într-un spațiu tridimensional.
Parametrii de control al motorului sunt relaționați, de obicei, cu pozițiile sau unghiurile arborelui motorului, care pot include și numărul de rotații complete de 360 de grade pentru a acoperi efectele cutiei de viteze. Alți parametri specifici pentru fiecare caz de utilizare includ condițiile de sarcină dinamică, cum ar fi cuplul, accelerația și momentul de inerție.
Pentru a urma o traiectorie calculată cât mai precis posibil, servocontrolerele trebuie să cunoască întotdeauna starea reală a sistemului pentru fiecare motor și arbore. Dacă un controler detectează o diferență de poziție sau de viteză, algoritmii de control trebuie să corecteze condițiile reale ale motorului pentru a reduce și pentru a compensa diferența măsurată cât mai repede posibil.
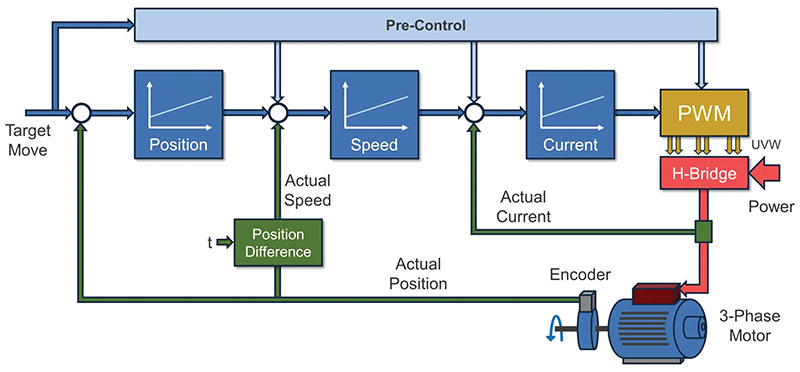
Figura 1: Servocomandă cu bucle de control al poziției, turației și cuplului. (© Renesas)
În cazul unor relații simple între algoritm și mișcarea rezultată, toate elementele mașinii comunică în intervale de timp echidistante. Aceste intervale de timp (sloturi) reprezintă baza de timp totală a sistemului, cunoscută și sub numele de durata ciclului. Ele permit, de asemenea, sincronizarea valorilor senzorilor pentru calcularea precisă a parametrilor de acționare a motorului: curenți, cuplu, viteză și poziția bobinei.
O servocomandă este componenta electronică prin care se controlează servomotorul în funcție de parametrii calculați ai acestuia menționați mai sus. Cuplul, un parametru important, depinde de intensitatea câmpului magnetic și este derivat din curenții bobinei motorului. Servocomenzile acoperă condiții foarte dinamice. Cu bucle de control imbricate pentru poziția țintă, viteză și cuplu, acestea acționează cu precizie arborii motorului, evitând în același timp situațiile de suprasarcină.
Modulație în lățime a impulsurilor cu 3 faze
La ieșirea sa, o servocomandă conține, adesea, un circuit electronic de amplificare pentru motoarele sincrone trifazate. Acest lucru necesită circuite de amplificare cu șase tranzistoare pentru o punte H trifazată, așa cum se arată în figura 2.
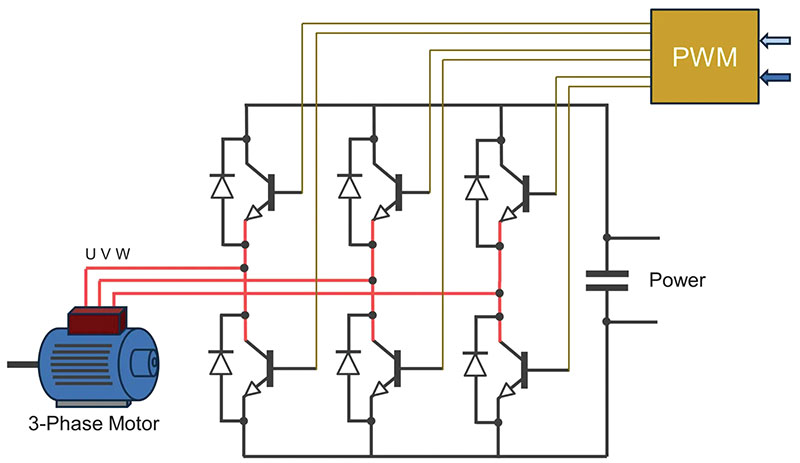
Figura 2: Amplificator trifazat cu punte H. (© Renesas)
Pentru a genera un câmp magnetic în interiorul motorului la o anumită viteză cu un cuplu definit în funcție de sarcină, cele șase tranzistoare trebuie să fie controlate cu precizie de un circuit PWM (Pulse Width Modulation). Din cauza vitezei mari de mișcare, a jitterului și a cerințelor de putere, software-ul nu poate genera aceste modele PWM. Ele trebuie să fie implementate în hardware și monitorizate și configurate continuu de algoritmul de control. Aceste tipare PWM comandă înfășurările motorului prin intermediul tranzistoarelor și permit arborelui să urmeze câmpul magnetic trifazat rotativ din interiorul motorului.
Codificator pentru motor
Spre deosebire de curenții din înfășurările motorului, poziția arborelui este observată prin citirea valorilor de la un codificator. Această componentă electromecanică este atașată la arbore și furnizează o valoare de înaltă rezoluție a poziției reale. Astfel de informații stau la baza aplicațiilor avansate de control al servomotoarelor.
Se pot selecta două tipuri principale de codificatoare, în funcție de cazul de utilizare vizat. Codificatoarele absolute oferă imediat poziția exactă, în timp ce codificatoarele relative furnizează doar diferența în raport cu o valoare anterioară. Dezavantajul este că poziția reală se pierde de fiecare data când sistemul este repornit. Aceste encodere necesită o monitorizare constantă și sunt ceva mai sensibile la erorile de poziție, deoarece nu se corectează automat prin utilizarea unei valori absolute următoare.
Codificatoarele absolute comunică cu controlerul printr-un protocol serial cu ajutorul câtorva semnale electrice. Pe partea controlerului, astfel de interfețe pentru codificatoare sunt implementate în hardware pentru un proces de citire autonom, complet sincronizat cu ciclurile sistemului.
Interfețele hardware ale codificatoarelor din servomotoare sunt o condiție prealabilă pentru rotații rapide și precise ale motorului cu timpi de ciclu scurți.
Comunicație industrială prin EtherCAT
În sistemele de automatizări industriale distribuite, componentele mecanice și electronice pentru controlul servomotoarelor sunt răspândite, adesea, pe o suprafață mare. Un PLC (Programmable Logic Controller – Controler Logic Programabil) principal (master) găzduiește aplicația care execută și sincronizează toate entitățile conectate. Fiecare entitate comandă unul sau mai multe motoare locale sau alte sarcini de I/O. Comunicația dintre aceste componente se bazează, de obicei, pe standardul IEEE 802.3 Ethernet și trebuie să suporte cicluri de comunicație scurte, cu jitter redus, pentru sarcini de control al servomotoarelor în timp real și de mare viteză, așa cum s-a descris mai sus.
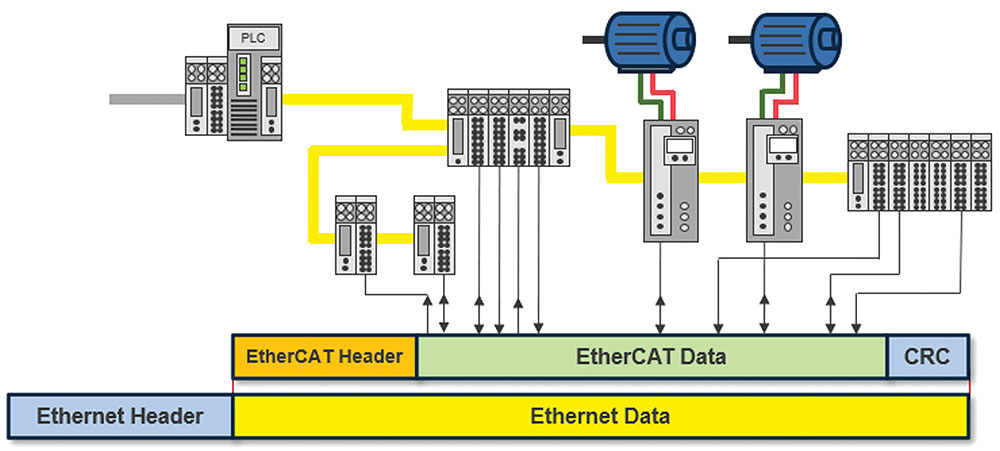
Figura 3: Accesarea datelor “on-the-fly” în sistemele de comunicații EtherCAT distribuite. (© Renesas)
EtherCAT (Ethernet for Control of Automation Technology) este o tehnologie Ethernet de la Beckhoff Automation promovată prin intermediul ETG (EtherCAT Technology Group). Împreună cu alte câteva protocoale de comunicație, EtherCAT utilizează un așa-numit hardware EtherCAT Slave Controller (ESC) în toate nodurile de rețea slave. Acesta utilizează o schemă de comunicare simplă, dar foarte eficientă, pentru accesarea datelor din Ethernet. Datele pot fi citite și scrise din mers (on-the-fly) în orice nod EtherCAT, pe măsură ce cadrul trece prin acesta, permițând ca toate nodurile rețelei să fie adresate din PLC cu orice cadru EtherCAT. O astfel de abordare face ca această tehnologie să fie ideală pentru aplicațiile de control al servomotoarelor, care necesită precizie și performanțe ridicate, cu timpi de ciclu scurți și jitter redus.
Familia RZ/T2 de dispozitive de control al motoarelor pentru automatizări industriale
Cheia succesului unei abordări de proiectare bazată pe platformă este scalabilitatea, care facilitează reutilizarea componentelor hardware și software pentru diferite produse. Scalabilitatea se realizează folosind aceeași arhitectură a familiei de dispozitive, prin partajarea funcțiilor periferice pentru Ethernet, memorii, timere și alte interfețe. Renesas a implementat acest concept în seriile sale de microprocesoare industriale RZ/T și RZ/N. Acestea includ suport Ethernet multi-protocol și procesare în timp real de înaltă performanță, pentru aplicații solicitante, precum controlul servomotoarelor. Cele mai recente dispozitive lansate sunt RZ/T2M, RZ/T2L și RZ/N2L.
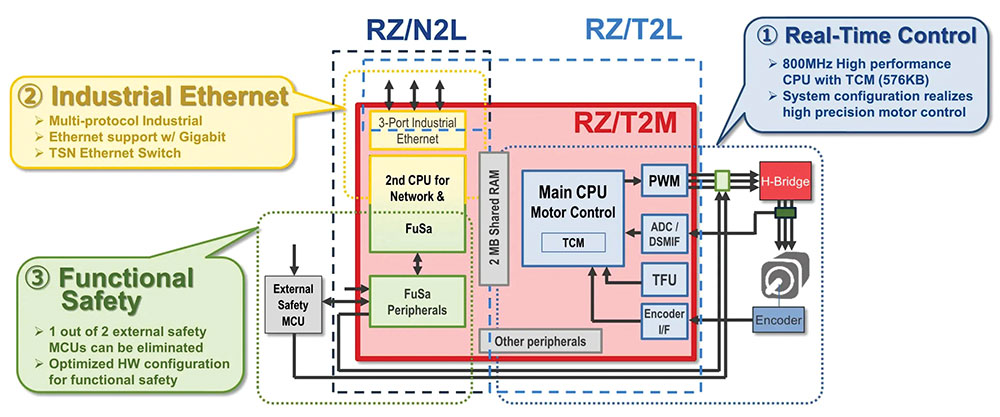
Figura 4: Relația dintre RZ/T2M, RZ/T2L și RZ/N2L. (© Renesas)
Figura 4 prezintă arhitectura comună și caracteristicile partajate ale familiei RZx2. Cu această familie, Renesas își propune să înlocuiască soluțiile multicip existente în aplicațiile industriale de servocomandă cu capabilități de comunicație în rețea în timp real, utilizând un SoC (System on a Chip) de mică putere. RZ/T2M este un dispozitiv de control al motoarelor de înaltă performanță, oferind în același timp, capabilități multi-protocol pe interfețele sale Ethernet industriale.
Caracteristici ale RZ/T2
Familia RZ/T2 combină două nuclee Arm Cortex-R52 de 800MHz pe un singur cip pentru tipuri de aplicații și comunicații distincte. Pentru a îmbunătăți performanțele de control al motoarelor în timp real, RZ/T2M dispune de 512kB/16kB de memorie TCM (Tightly Coupled Memory), 16kB/32kB de memorie cache pentru CPU, inclusiv ECC și un bus LLPP (Low Latency Peripheral Port) dedicat interfețelor motorului.
 Pe lângă comunicația Ethernet flexibilă în timp real, 2MB de memorie SRAM internă, memorie externă și interfețe flash, precum și periferice standard precum UART, SPI, I2C, CAN și USB, RZ/T2M include un set de controlere speciale pentru controlul motoarelor și servomotoarelor:
Pe lângă comunicația Ethernet flexibilă în timp real, 2MB de memorie SRAM internă, memorie externă și interfețe flash, precum și periferice standard precum UART, SPI, I2C, CAN și USB, RZ/T2M include un set de controlere speciale pentru controlul motoarelor și servomotoarelor:
– 35 timere pentru forme de undă PWM trifazate, inclusiv generarea de timp mort.
– Interfață de intrare pentru codificator cu 2-canale pentru EnDat, BiSS-C, FA-CODER, format A și altele
– Interfață Delta-Sigma cu 2-canale
– Intrare analogică pe 24-canale pe 12-biți pentru diverse scheme de declanșare și scanare sincronă
– Accelerator pentru unitatea de funcții trigonometrice
– Bus LLPP cu latențe de acces reduse
Deoarece controlul motoarelor trebuie să acopere aspecte de siguranță funcțională în multe cazuri de utilizare, RZ/T2M include caracteristici de siguranță pentru a separa domeniile de siguranță de cele nesiguranță.
RZ/T2L ca soluție autonomă pentru motoare, cu EtherCAT
Arhitectura celui mai mic membru al familiei RZ/T2L include procesarea aplicațiilor high-end pentru controlul servomotoarelor de la RZ/T2M, dar limitează caracteristicile de comunicație industrială la protocolul EtherCAT. Dispozitivul se adresează nodurilor slave EtherCAT cu costuri optimizate, în timp ce software-ul aplicației servo poate fi, pur și simplu, reutilizat sau transferat între RZ/T2M și RZ/T2L.
Următoarea listă prezintă principalele diferențe ale unui caz de utilizare optimizat și mai puțin complex cu un software EtherCAT cu amprentă redusă:
– Un Arm Cortex-R52 pe 32-biți la o frecvență de 800 MHz în loc de o arhitectură cu două nuclee
– 1 MB SRAM pe cip în loc de 2 MB
– Controler EtherCAT Slave cu 3-porturi plus un MAC pentru un port Ethernet fără switch Ethernet
– RZ/T2L este disponibil doar într-o capsulă mică BGA196 cu un număr redus de periferice
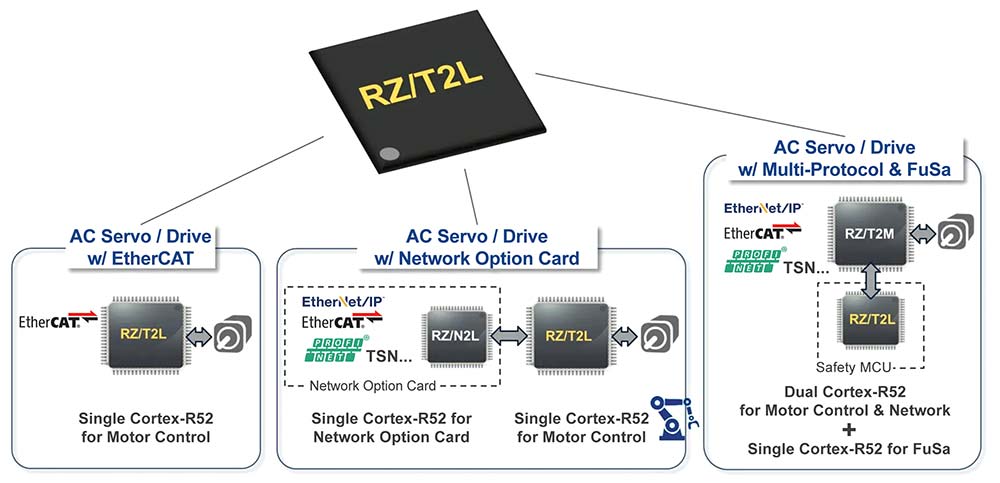
Figura 5: Principalele cazuri de utilizare pentru RZ/T2L. (© Renesas)
Cu acest set de caracteristici, RZ/T2L este cea mai bună opțiune pentru o aplicație de control al motorului pe un singur cip, de complexitate redusă și comunicație EtherCAT.
RZ/T2L ca soluție de rezervă sau de înlocuire, care îmbunătățește performanța sistemului
Fiind o alternativă bună pentru produsele EtherCAT pur implementate cu alte dispozitive multi-protocol, precum R-IN32M3-EC, RZ/T1 și RZ/N1L, noul RZ/T2L este un înlocuitor ideal și mai puternic pentru EC-1, bazat pe Cortex-R4. De asemenea, RZ/T2L îmbunătățește performanța sistemelor proiectate anterior datorită procesorului mai puternic și altor caracteristici noi. Exemple sunt Event Link Controller (ELC) pentru reacții directe bazate pe hardware la evenimentele sistemului și busul Low Latency Peripheral Port (LLPP) pentru acces de mare viteză la unitățile de control al motorului.
O altă valoare adăugată a RZ/T2L poate fi o arhitectură de comunicație EtherCAT modulară. Adesea, o astfel de abordare este utilizată pentru a adăuga o nouă tehnologie de comunicație la un sistem existent. Acest lucru poate fi realizat printr-o interfață standard simplă, cum ar fi SPI, fără modificări majore la proiectarea hardware sau software a produsului existent.
Datorită caracteristicilor sale de securitate, RZ/T2L este, de asemenea, o alegere bună ca un al doilea microcontroler de siguranță pentru aplicațiile de control al motoarelor în combinație cu un microprocesor principal RZ/T2M.
Mai multe detalii despre noul dispozitiv RZ/T2L, placa de evaluare disponibilă, instrumentele IDE cu drivere software și exemplele de aplicații asociate sunt disponibile pe site-urile web Renesas:
– Seria de microprocesoare RZ/T | Renesas
– Dispozitivul RZ/T2L
Autor: Andreas Schwope, Sr Staff Application Engineer
Renesas Electronics Europe | https://www.renesas.com
![]()