

Senzorii
Pentru a cunoaște unde se află dispozitivul final al robotului care interacționează cu mediul (end-effector – sau elementul efector), precum și viteza și accelerația acestuia în orice moment, este extrem de importantă existența unui anumit tip de senzor. Acesta ar putea fi un senzor cu efect de Hall, un encoder optic sau un traductor de poziție. Pentru o acuratețe optimă, uneori este necesar să montați acest dispozitiv mai degrabă aproape de punctul de încărcare, decât de motor.
Desigur, unele aplicații mențin costurile și complexitatea la un nivel minim prin faptul că nu utilizează un senzor. Controlul orientării în câmp fără senzori implică citirea tensiunilor și curenților la fiecare fază a înfășurărilor motorului și efectuarea un set de calcule complexe pentru a determina poziția motorului. O asemenea abordare necesită mai multă putere de calcul și o programare mai sofisticată și, totuși, nu oferă aceeași încredere sau robustețe precum în cazul utilizării unui senzor. În consecință, pentru mulți proiectanți din robotică, senzorii rămân alegerea preferată.
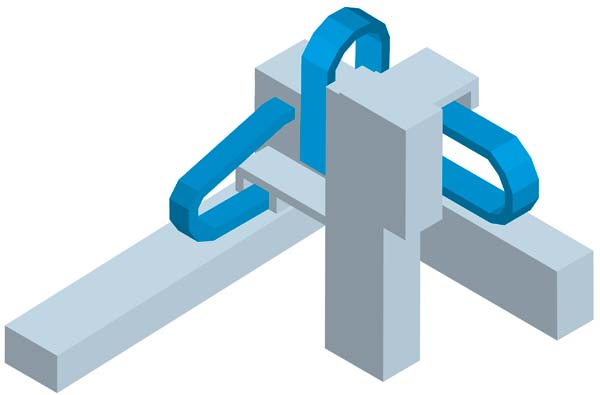
Figura 1: Robot cartezian.
Înțelegerea clasificărilor comune ale robotului
Când spunem “robot”, probabil că ne gândim la un asistent umanoid, care se mișcă liber. Dar majoritatea sistemelor robotizate din industrie sunt destul de diferite, fiind mașini staționare cu brațe configurate pentru a îndeplini sarcini specifice. Mulți pot fi în mare parte clasificați ca roboți cartezieni, cilindrici sau sferici.
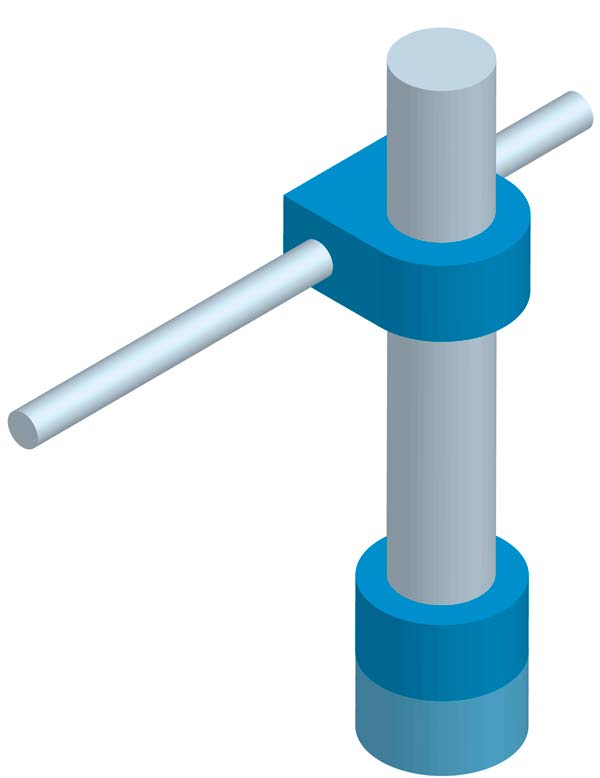
Figura 2: Robot cilindric.
Roboții cartezieni sunt cel mai ușor de controlat, aceștia putându-se deplasa în mișcare liniară de-a lungul axelor x, y și z. Ei sunt utilizați în mod obișnuit pentru lipire/etanșeizare, simple asamblări și aplicații de tip pick-and-place.
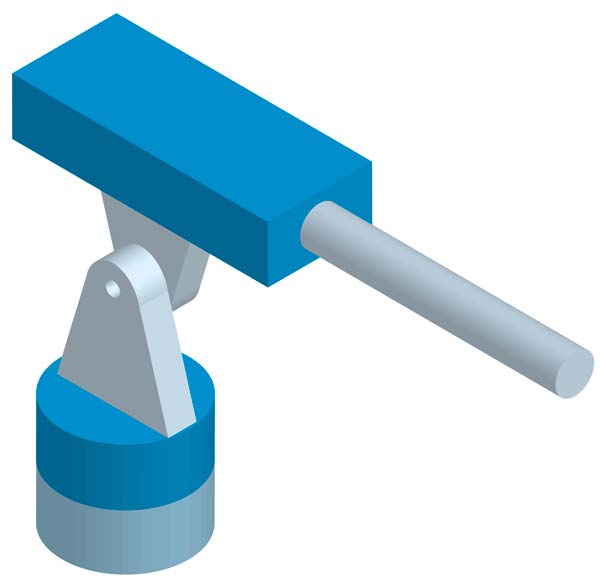
Figura 3: Robot sferic.
Un robot cilindric asigură mișcarea de-a lungul a două axe liniare și mișcarea de rotație în jurul uneia dintre ele. Veți găsi acest tip de robot utilizat pentru sudarea prin puncte, pentru manipularea sculelor sau pentru lucrările de asamblare.
Roboții sferici asigură două mișcări de rotație și una de translație pentru a le permite să funcționeze într-o zonă sferică. Aceștia sunt folosiți pentru operații de sudare, manipulare de scule și turnare.
Aceste setări vă oferă trei grade de libertate. Nu toate aplicațiile vor avea nevoie de trei, în timp ce altele vor necesita mai multe, care pot fi obținute prin utilizarea unor articulații multiple. Provocarea principală este că, pe măsură ce creșteți numărul de grade de libertate, devine din ce în ce mai greu să controlați robotul cu exactitate și cu precizie.
Alegerea unui profil de traiectorie
La proiectarea unui sistem de control pentru orice clasă de robot, un aspect important îl reprezintă profilul traiectoriei sale de mișcare. De exemplu, puteți muta brațul robotului între două puncte mai rapid, prin accelerarea și decelerarea mai rapidă între cele două curse. Dar este acceptabil dacă apare riscul ca brațul robotului să depășească sau să oscileze în jurul țintei (poziției finale)? Proiectanții trebuie să se gândească cu atenție asupra compromisurilor pe care le pot face și, prin urmare, asupra formelor pe care ar trebui să le ia traiectoriile de mișcare.
Pentru a face acest lucru mai simplu, există profiluri de traiectorie standard, cum ar fi trapezoidală, curba S și mișcarea pe contur. În general, acestea sunt în mod progresiv mai rafinate și necesită o putere de calcul progresivă mai mare.
Pentru a implementa abordarea aleasă, mulți folosesc algoritmul de control în buclă-închisă PID (proportional-integral-derivative), care oferă în mod obișnuit un control suficient de precis asupra motorului și elementului efector.
Desigur, atunci când vă extindeți la mai multe axe și motoare care trebuie să fie sincronizate și coordonate strâns, unul cu altul, provocările privind controlul robotului cresc considerabil.
Alegerea unui controler standard sau personalizat
Discuția se îndreaptă acum către controlerele motorului și rețineți că acestea nu sunt același lucru cu driverele motorului, care controlează puterea motorului. Acestea fiind spuse, este posibilă integrarea controlerelor cu driverele și dispozitivele de putere pentru motoarele mai mici.
Dacă este nevoie de o mișcare (relativ) standard, sunt disponibile circuite cu controler integrat cu funcție fixă. Chiar dacă acestea nu dispun de flexibilitatea controlerelor mai complexe, există unele dispozitive care oferă o gamă de profiluri de mișcare și capabilitatea de a seta parametrii cheie. Acestea sunt relativ ușor de utilizat și sunt ieftine în același timp.
Dacă este nevoie de o mișcare mai sofisticată sau dacă proiectul necesită o conectivitate suplimentară, este probabil să fie mai adecvată folosirea unui anumit tip de procesor programabil de către utilizator, folosind un FPGA (field-programmable gate array) sau un procesor de semnal digital. Acestea oferă o flexibilitate mult mai mare, o varietate de procesare auxiliară și suport de caracteristici. Există o mulțime de opțiuni în această zonă, precum kituri de dezvoltare, pachete de coduri și instrumente de validare. Toate acestea vor ajuta inginerii din domeniul roboticii să dezvolte capabilități sofisticate pe care să le integreze în sistemele lor de control robotizate.
– va urma –
 Autor: Mark Patrick, Mouser Electronic
Autor: Mark Patrick, Mouser Electronic
Mark s-a alăturat companiei Mouser Electronics în Iulie 2014, după ce a activat în conducerea departamentului de marketing al companiei RS Components. Înainte de RS, Mark a petrecut 8 ani la Texas Instruments având sarcini de suport tehnic şi aplicaţii. El deţine o diplomă de masterat în Inginerie Electronică de la Coventry University.
![]()
Mouser Electronics
https://ro.mouser.com/