

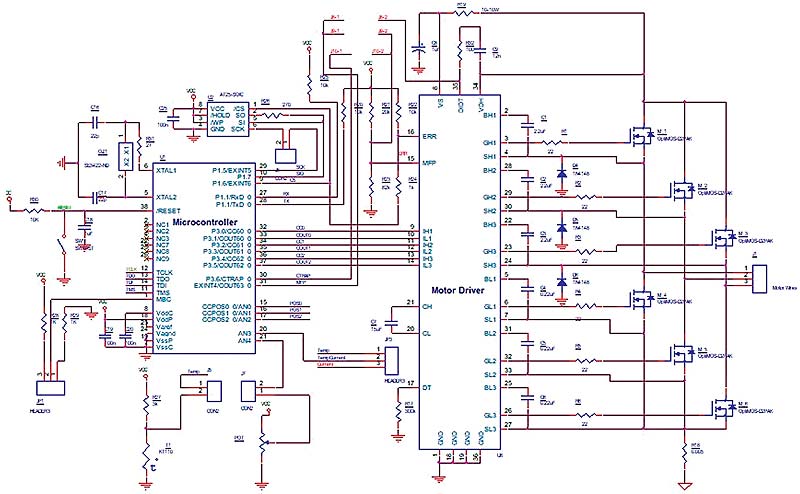
Figura 5: Schema electrică de principiu a circuitului de comandă [7]
Stabilizarea giroscopică precisă și rapidă a unor mijloace mobile terestre și aeriene constituie un criteriu de performanță foarte important în prezent. Sistemele moderne de comandă utilizează motoare de curent continuu fără perii (BLDC) comandate electronic prelucrând semnalele furnizate de traductoare Hall și de un calculator specializat. Articolul de față se referă la un circuit electronic de comandă a motoarelor de curent continuu fără perii pentru sisteme de poziționare stabilizate giroscopic.
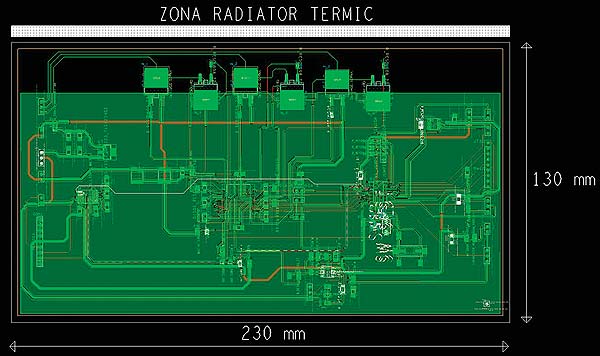
Figura 6: Circuitul imprimat virtual al modulului electronic al circuitului de comandă
Un alt avantaj al PWM este faptul că în cazul în care tensiunea de alimentare continuă este mai mare decât tensiunea nominală a motorului, motorul poate fi controlat prin limitarea procentului factorului de umplere pentru a se ajunge la un nivel care corespunde cu cel a tensiunii nominale a motorului.
Se dă în continuare un exemplu concret de aplicare, figura 5 prezentând schema electrică de principiu a circuitului electronic de comandă a motoarelor de curent continuu fără perii, iar în figura 6 circuitul imprimat proiectat în conformitate cu această schemă.
Ca noutate a circuitului de comandă este utilizarea unor tranzistoare OptiMOS-D2PAK care permit, prin capsula de mari dimensiuni și radiatorul termic asociat, comanda unor motoare BLDC de puteri adecvate platformelor mobile de dimensiuni mari.
Circuitul imprimat a fost proiectat respectând principiile compatibilității electromagnetice și regula cuadripolului, optimizându-se astfel curenții de întoarcere din cadrul blocurilor funcționale și minimizându-se interferența electromagnetică.
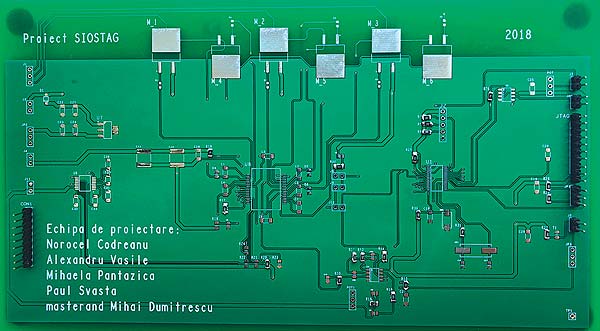
Figura 7: Placa de circuit imprimat reală, după fabricație
Figura 7 prezintă imaginea plăcii de circuit imprimat reale a modulului electronic al circuitului de comandă, după fabricație și asamblarea primelor componente electronice.
În legătură cu filtrarea zgomotelor și semnalelor parazite, testele statice au condus la rezultatele prezentate în figura 8 pentru viteza unghiulară și eliminarea drift-ului pe termen lung (cu albastru), respectiv media mobilă a acesteia pe 1000 de citiri (cu roșu) funcție de timp. În al doilea grafic al figurii (cel de jos) este reprezentată variația unghiului absolut funcție de timp. Rezultatele din figura 9 se referă la aceleași semnale, filtrul folosit fiind unul de tip Kalman. Testele dinamice simple, prin mișcarea unei platforme mobile, au pus în evidență impactul accelerațiilor liniare asupra metodelor de calcul. Filtrele complementar și Kalman sunt influențate negativ de accelerațiile liniare tranzitorii ce perturbă unghiul calculat. Acestea au fost reduse prin ajustarea coeficienților filtrelor și implementarea unor algoritmi speciali de calcul care au redus timpul de răspuns și au redus semnificativ perturbațiile.
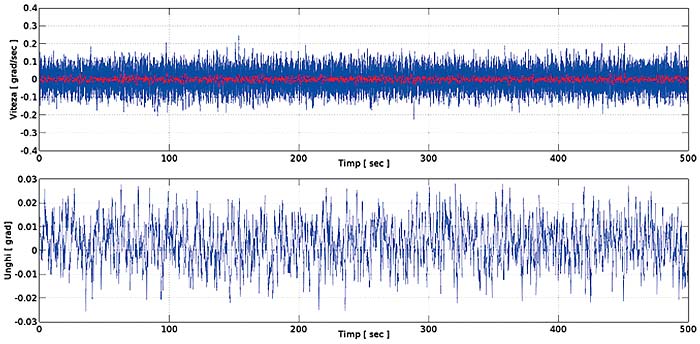
Figura 8: Viteza unghiulară și eliminarea drift-ului pe termen lung (cu albastru), respectiv media mobilă a acesteia pe 1000 de citiri (cu roșu) utilizând un filtru complementar [7]
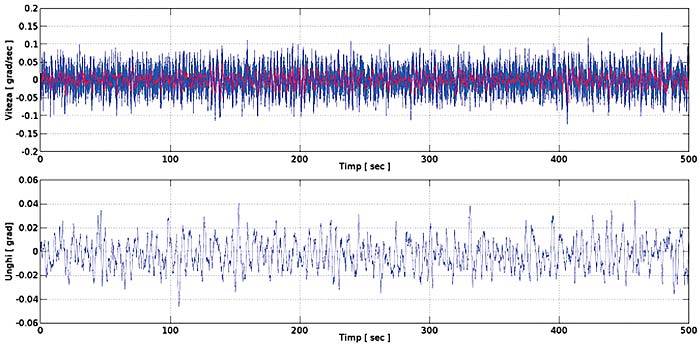
Figura 9: Viteza unghiulară și eliminarea drift-ului pe termen lung (cu albastru), respectiv media mobilă a acesteia pe 1000 de citiri (cu roșu) utilizând un filtru Kalman [7]
• răspuns dinamic bun;
• eficiență ridicată;
• durată mare de viață;
• funcționare silențioasă la viteze mari.
Autori:
Mihai Jurbă, Emil Popescu, Dănuţ Stroe
ELECTRO OPTIC COMPONENTS srl – office@electro-optic.ro
Alexandru Vasile, Norocel-Dragoș Codreanu, Ciprian Ionescu, Rodica Negroiu, Mihaela Pantazică
Universitatea POLITEHNICA din București – cetti@cetti.ro
Bibliografie
1. Brushless DC (BLDC) Motor Fundamentals AN885, http://ww1.microchip.com/downloads/en/AppNotes/00885a.pdf;
2. Controlling Sensorless, BLDC Motors via Back EMF https://www.digikey.in/en/articles/techzone/2013/jun/controlling-sensorless-bldc-motors-via-back-emf;
3. TLE987xQX https://www.infineon.com/dgdl/Infineon-TLE9879QXA40-UM-v01_03-EN.pdf?fileId=5546d4624e24005f014e52ca1628452c;
4.TLE9879 EvalKit V1.2 Users’ Manual https://www.infineon.com/dgdl/Infineon-TLE9879-EvalKit-UM-v01_00-EN.pdf?fileId=5546d4624e765da5014eb587aeb53373;
5. Nanotec DB42S03 https://en.nanotec.com/fileadmin/files/Datenblaetter/BLDC/DB42/DB42S03.pdf;
6. M. M. Chițu, “Evaluarea funcționării BLDC-urilor în sistemele electronice ale automobilelor”, lucrare de disertație, iulie 2018;
7. Cerere de brevet de invenție nr. A/00699 din 20.09.2018.