

Articolul prezintă modul de realizare şi analiza unui proiect de comandă utilizând un motor de CA cu inducţie cu o singură fază şi un microcontroler pe 8 biţi într-o aplicaţie de deschidere a uşilor de garaj.
De: Justin Bauer, Microchip Technology Inc.
Micile motoare de CA cu inducţie, să zicem pentru deschiderea uşilor de garaj, pot avea adăugate control de viteză şi pornire lină cu costuri mici utilizând un circuit inversor trifazat. Aceste motoare cu condensator permanent (PSC) sunt printre cele mai simple şi mai larg utilizate pentru acest tip de aplicaţie. Ele dispun de un cuplu şi un curent de pornire reduse, dar pot fi ineficiente datorită condensatorului de pornire nepolarizat, care adesea se strică înaintea restului motorului.
Aceste motoare cu o singură fază sunt adesea apelate ca motoare cu două faze pentru că ele nu pot funcţiona fără o diferenţă de fază suficientă între cele două înfăşurări. Condensatorul este plasat între semnalul de intrare şi înfăşurare pentru a produce un defazaj de aproximativ 90°.
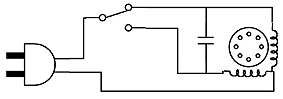
Comutatorul este adesea înlocuit cu un releu ce poate controla direcţia prin schimbarea fazei care o conduce sau o urmează pe cealaltă. Valoarea condensatorului este tipic specificată de producătorul motorului şi este uneori în gama de la 5 la 50µF pentru motoare care au mai puţin de 0,75kW, de tipul celor de care ne ocupăm aici. Condensatorul trebuie ales cu atenţie pentru a corecta factorul de putere pentru o eficienţă energetică maximă. Figura 1 prezintă topologia unui motor de CA cu inducţie tradiţional.
Tensiunea nominală este în mod uzual ridicată, între 220 şi 450V, în funcţie de tensiunea de intrare. Condensatorul nu trebuie să fie polarizat deoarece el funcţionează în tensiune alternativă. Dacă acest condensator se defectează, motorul va înceta să se rotească. Importanţa selectării condensatorului corect este din acest motiv critică.
Un condensator practic are rezistenţă şi radiază căldură de vreme ce consumă curentul de riplu CA RMS conform rezistenţei sale serie echivalente. Condensatorul instalat permanent realizează un echilibru între capabilitatea de cuplu de pornire şi reducerea variaţiilor de cuplu la viteza de rulare. Datorită valorii nominale ridicate a VA pentru condensator, el este adesea selectat pentru a răspunde cerinţelor minime de performanţe la pornire, conducând la un randament de funcţionare scăzut.
Pentru motoarele care nu au înfăşurări identice, este necesară alimentarea celor două faze cu tensiuni diferite. Această asimetrie se datorează prezenţei condensatorului, ce formează un circuit rezonant cu inductanţa motorului. În consecinţă, acest lucru produce o creştere a tensiunii pe una dintre înfăşurări şi cauzează variaţii de curent nedorite.
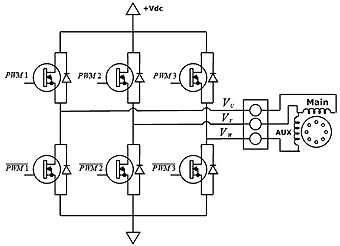
Cu toate acestea, pentru înlocuirea condensatorului permanent poate fi utilizat un invertor trifazat, după cum se arată în figura 2. Acest lucru permite ca viteza motorului să fie reglată cu tensiunea potrivită aplicată fiecărei înfăşurări astfel încât înfăşurarea mai slabă să nu fie supra-comandată.
Motorul se va învârti şi fără condensator dacă bobinele sunt comandate defazat una de cealaltă. Acest lucru poate fi obţinut prin crearea în software a trei faze. Aceste tensiuni cu trei faze pot fi apoi referite una la cealaltă pentru a crea două forme de undă rezultante pe înfăşurările motorului. Una dintre faze este luată ca referinţă, sau neutru pentru a crea cele două forme de undă. Cele trei faze pot fi create în software utilizând tehnici PWM.
Comparaţie
Pot fi rulate trei teste pentru a compara metoda de funcţionare PSC cu metoda inversorului fără condensator de pornire. Acestea sunt: cuplul pentru a caracteriza efectul frecvenţei variabile în comanda motorului; acceleraţie şi viteză pentru a identifica ce metodă învârte arborele motorului mai rapid şi cât de repede va accelera sarcina; şi randamentul pentru a compara componenta reală a puterii de ieşire cu puterea de intrare şi pentru a măsura factorul de putere şi alte ineficienţe.
Aceste trei teste acoperă cele mai multe consideraţii de proiectare din controlul motoarelor. Niciunul dintre teste nu necesită o pregătire specială. Fiecare analiză din cele trei teste separate poate utiliza acelaşi subset de date. Pregătirea testului este prezentată în figura 3.
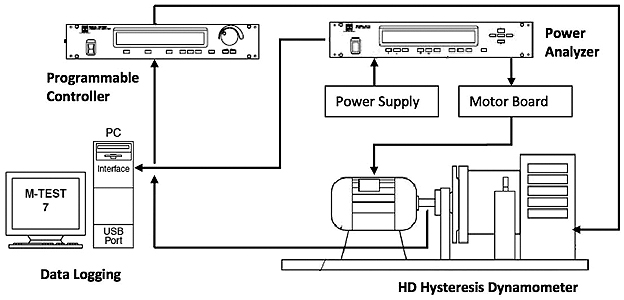
Acest test utilizează un motor de 0,19kW cu o singură fază cu o configuraţie echilibrată de înfăşurări. Ambele înfăşurări au rezistenţe şi inductanţe identice. Pentru măsurarea vitezei arborelui este utilizat un senzor cu efect Hall. Intrarea necesită 220V la 60Hz, două fire, o singură fază. Ieşirea se alimentează din cele două terminale ale inversorului.
Pe interfaţa PC rulează software-ul Magtrol M-Test 7. Controlerul programabil aplică testul din acest software pe dinamometru şi citeşte cuplul aplicat. Analizorul de putere realizează şi înregistrează celelalte citiri.
Începând cu testul de cuplu se pare că motorul are cel mai mare cuplu de pornire, în jur de 0,75Nm între 50 şi 60Hz. Frecvenţele mai mari şi mai mici de 60Hz au profile de cuplu mai mici. Cu toate acestea, citirile la joasă frecvenţă nu produc o curbă de cuplu constantă. Frecvenţele mai mici de 60Hz necesită o reglare precisă a raportului tensiune-frecvenţă, din cauza pierderilor din motor şi impreciziilor din comandă. Frecvenţele mai mici de 60Hz sunt păstrate la tensiune maximă.
O frecvenţă mică conduce la scăderea impedanţei inductorului. Tensiunea ridicată aplicată acestei impedanţe reduse creşte curentul din stator, ceea ce produce un cuplu mai mare. Reglarea fină este necesară pentru a liniariza curba de cuplu.
Formele curbelor pentru cele două metode diferă foarte mult. Metoda cu condensator prezintă un cuplu de pornire ceva mai mare şi va accelera mai rapid decât placa inversoare la 60Hz. Placa inversoare produce o curbă similară cu cea a unui motor de clasă D, în vreme ce topologia PSC produce o curbă de cuplu similară clasei A. Valori de tensiune inegale cauzate de condensatorul permanent creează fluxuri magnetice de mărime inegală în stator. Placa inversoare încearcă să creeze o valoare egală a curentului în fiecare înfăşurare, de vreme ce acest motor are impedanţe identice în fiecare. Forma curbelor de cuplu nu este similară datorită acestor discrepanţe în topologia de comandă.
În ceea ce priveşte cuplul de pornire atunci când rotorul este blocat, inversorul nu va fi capabil să ridice aceeaşi mărime a sarcinii precum metoda PSC dacă inversorul a fost programat să rotească motorul la o frecvenţă de modulaţie de 60Hz. Totuşi, placa inversoare poate utiliza o frecvenţă variabilă pentru a ridica o sarcină chiar şi mai mare. Proiectantul trebuie de asemenea să ia în considerare echilibrul dintre un cuplu de pornire mai mare versus randament şi viteză.
Cel mai evident avantaj al controlului tensiunii şi frecvenţei este acela că proiectantul poate controla viteza cu care se roteşte arborele motorului. Cu cât se roteşte mai repede, cu atât mai curând sarcina poate fi împinsă sau trasă la destinaţie. Acest lucru poate fi un câştig în proiectarea aplicaţiilor de tip uşă de garaj sau sisteme de porţi.
Placa inversoare
Astfel, placa inversoare permite motorului să depăşească caracteristicile unui control prin metoda PSC. Aceasta din urmă poate comanda numai la o frecvenţă şi de aceea nu poate să depăşească viteza sincronă.
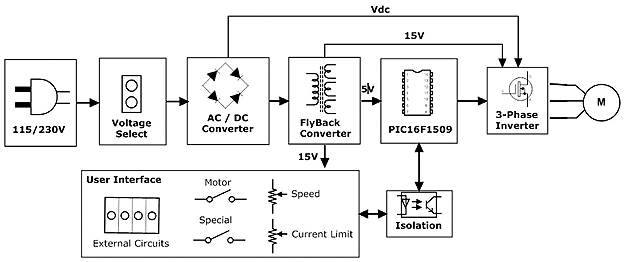
Placa inversoare poate fi construită ca platformă specifică aplicaţiei mai degrabă decât ca o placă demonstrativă de uz general. Totuşi, ea oferă numeroase intrări şi ieşiri (I/O) pentru ca utilizatorul să poată interacţiona şi aduce modificări. Inversorul este realizat pentru a comanda un motor de CA cu inducţie monofazat sau trifazat. În figura 4 este prezentată succint placa, utilizând microcontrolerul PIC16F1509 de la Microchip.
Placa a fost proiectată să dispună de flexibilitate, astfel încât unele dintre caracteristicile sale pot fi utilizate sau nu pentru a permite optimizări. Majoritatea I/O sunt utilizate de programul implicit, dar este încă suficient spaţiu pentru dezvoltator de a utiliza modificări particulare. Liniile I2C sunt de asemenea libere pentru orice dispozitiv de tip sclav adăugat.
Unele dintre I/O sunt multiplexate pe un pin pentru a creşte numărul de intrări/ieşiri ce pot fi utilizate. Toate cerinţele de interfaţă cu utilizatorul sunt izolate prin două optocuploare cu 4 canale şi un optocuplor cu un canal.
Placa oferă două butoane de tip switch şi două potenţiometre. Există de asemenea conectori cu pini ce asigură conectare I/O externe, precum senzori de cursă pentru uşile de garaj. Cele două potenţiometre au tranzistorul lor în circuitul optocuplor reglat în regiunea de amplificare. Ieşirea este de aceea aproximativ liniară, pentru că LED-ul optocuplorului nu are o curbă I-V liniară. Pentru fiecare potenţiometru se consumă curenţi ridicaţi în jurul valorii de 30mA.
Butoanele digitale cu apăsare şi intrările auxiliare sunt reglate pentru a cauza o întrerupere la schimbare (IoC) atunci când sunt utilizate. Acest lucru scuteşte CPU de a verifica continuu nivelul de tensiune de pe pini. De fiecare dată când este detectată o întrerupere IoC, se va citi un convertor ADC pentru a determina ce intrare a cauzat întreruperea.
Funcţionarea
Motorul se află în stare inactivă atunci când microcontrolerul PIC16F1509 iniţializează pinii şi opreşte motorul. Atunci când este apăsat butonul de pornire, motorul porneşte utilizând o metodă de pornire lină, în care frecvenţa şi tensiunea sunt reglate în mod liniar pentru a aduce motorul încet la viteza de operare.
După finalizarea operaţiei de pornire lină motorul trece în starea de funcţionare. Valorile de viteză şi curent sunt constant citite în bucla principală. Dacă se detectează un supracurent, motorul este oprit şi LED-ul de stare începe să clipească pentru a semnala o defecţiune. Motorul se opreşte normal cu ajutorul butonului cu apăsare utilizând frânarea sau oprirea lină pentru revenirea în starea inactivă.
Concluzie
Motoarele de CA cu inducţie, precum cele utilizate în aplicaţiile pentru uşi de garaj pot fi comandate utilizând o placă inversoare în loc de condensatorul tradiţional. Acest lucru permite adăugarea cu un cost relativ redus de capabilităţi de control viteză şi pornire lină. Placa inversoare se bazează pe microcontrolerul pe 8 biţi PIC16F1509 de la Microchip ■

Microchip Technology
www.microchip.com